















































软件

产品


今天我们来用UG绘制一个尖嘴钳主体部分,也是一个装配体,最后我们还能对它进去运动仿真,来学习一下吧!

建模过程:
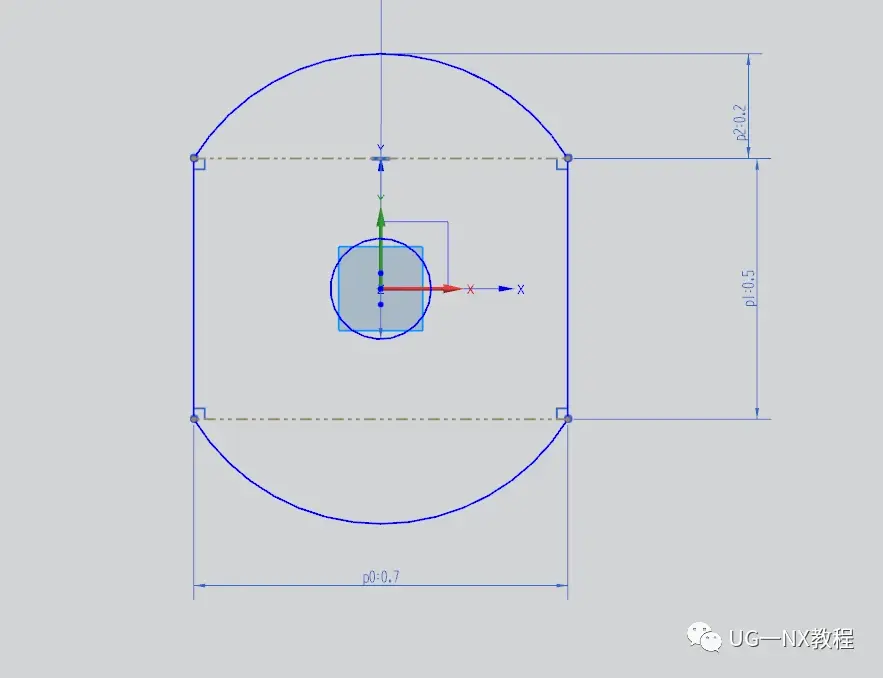
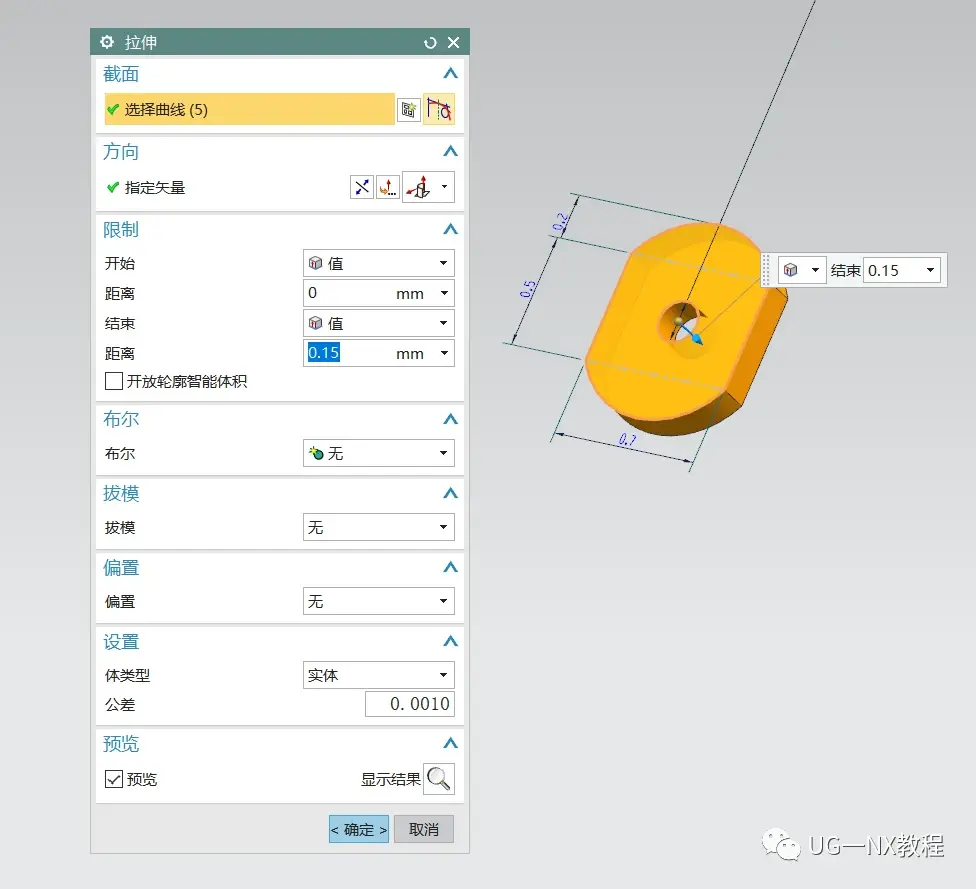
1.打开UG,在XY平面绘制草图如下,并拉伸
2.继续在XY平面绘制手柄草图,完成后拉伸
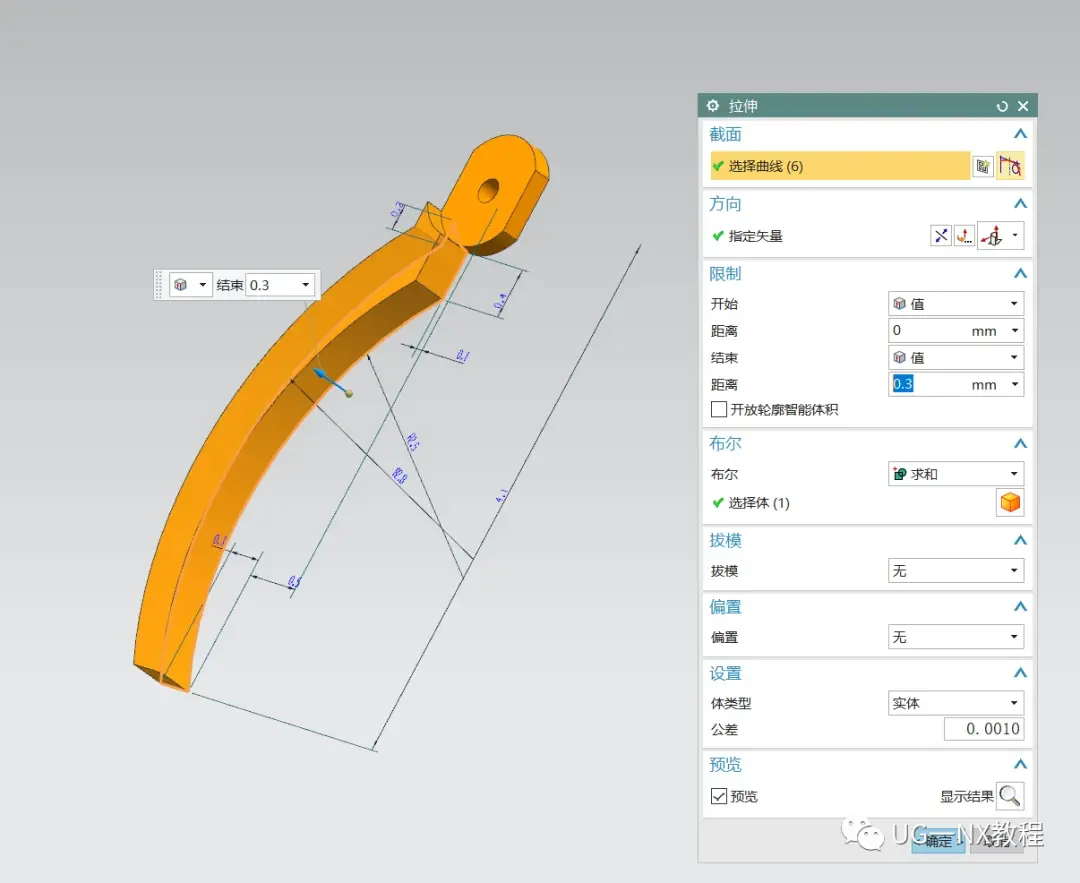
3.绘制草图,拉伸求和
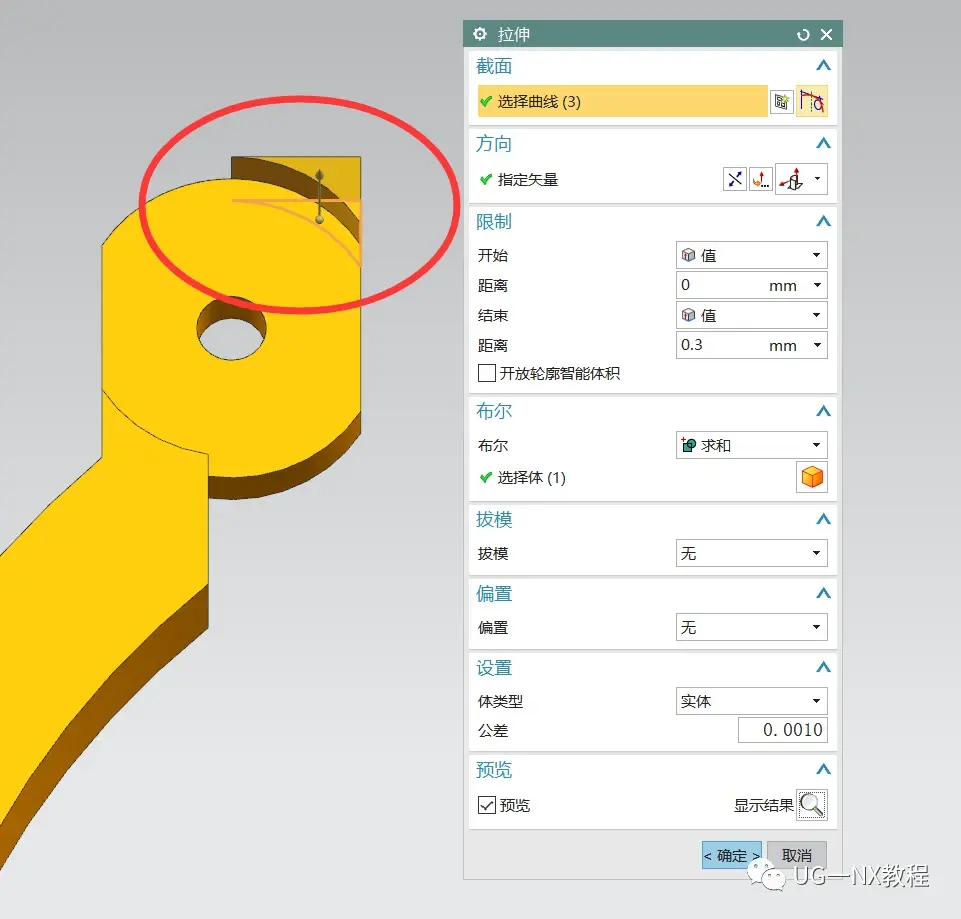
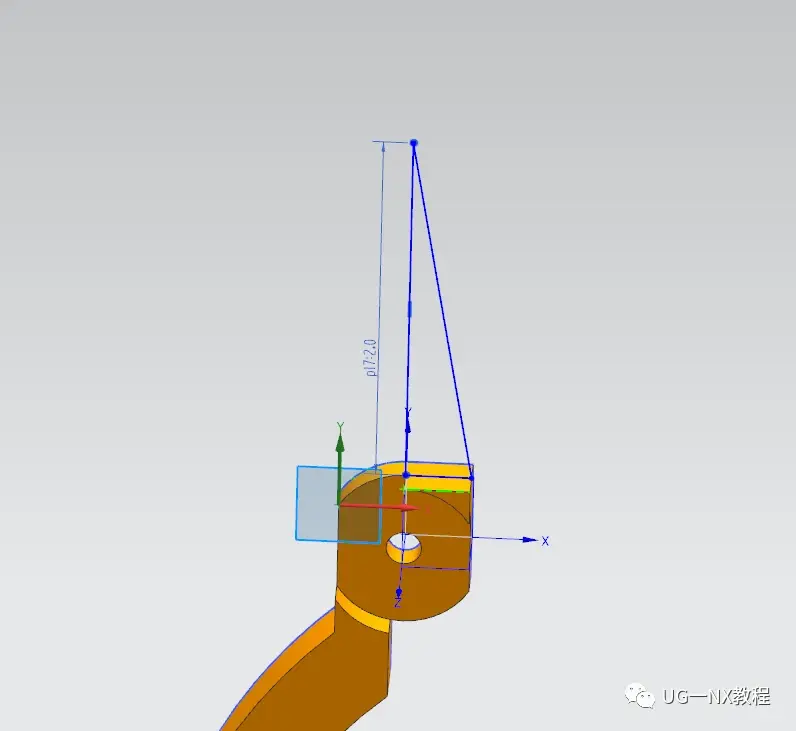
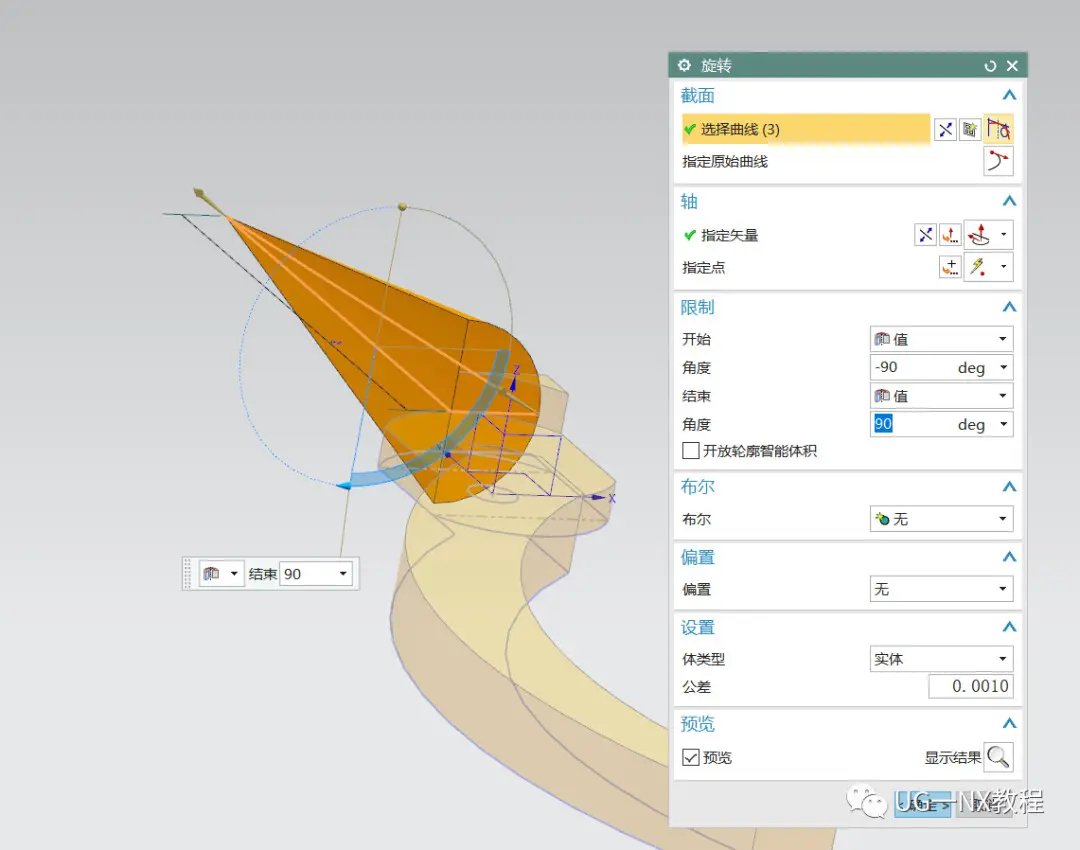
4.在第一个拉伸面上绘制草图,旋转180度(-90~90)
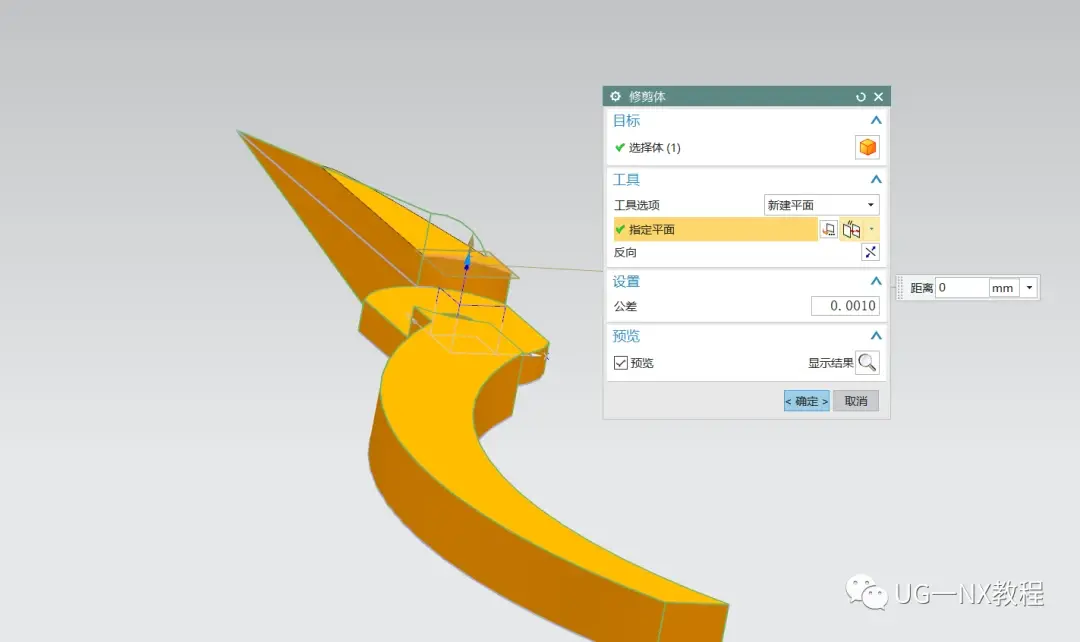
5.利用平面进行修剪
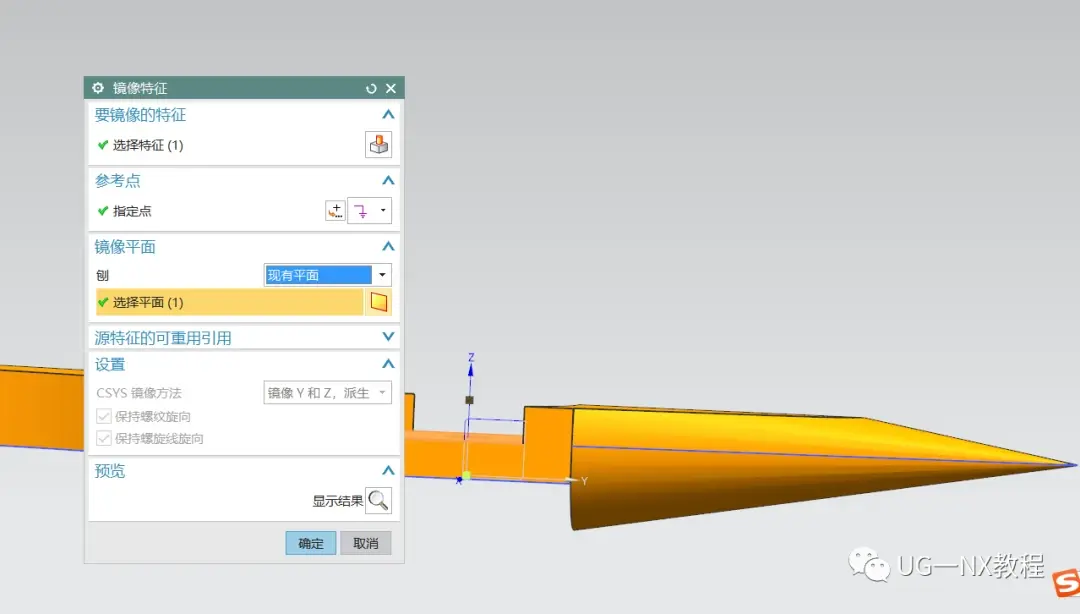
6.把修剪体镜像到下方
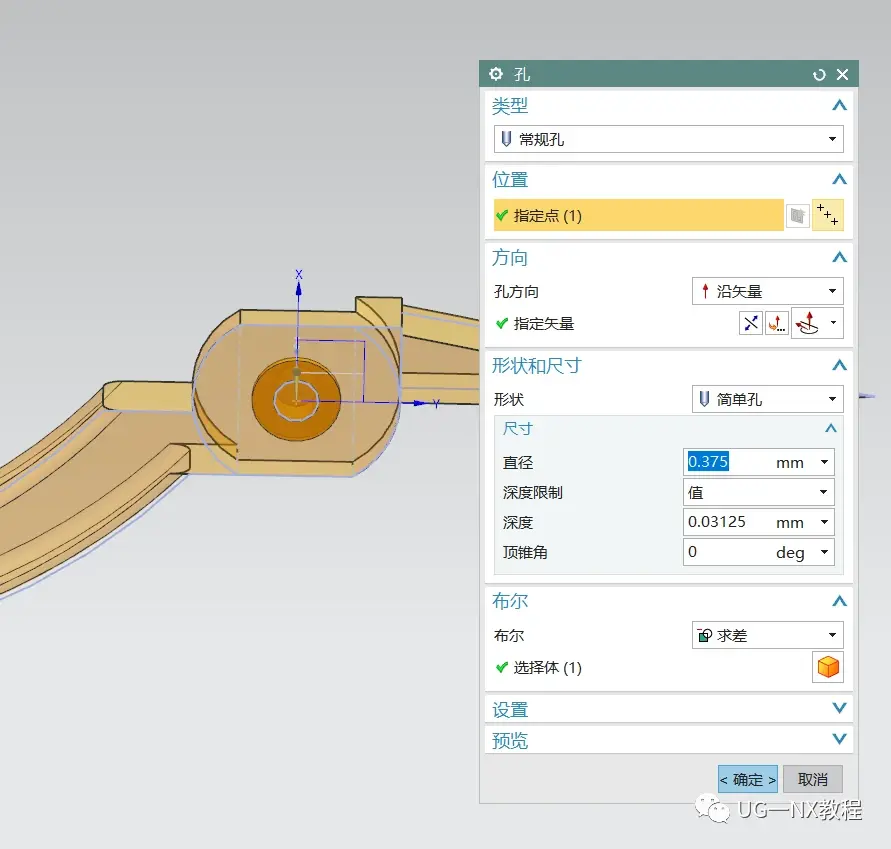
7.对手柄部分进行倒圆角,在圆形区域打孔处理
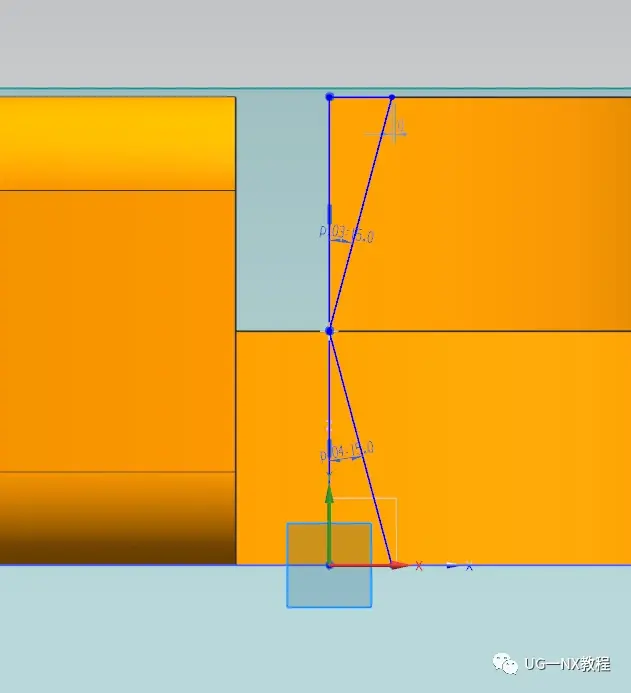
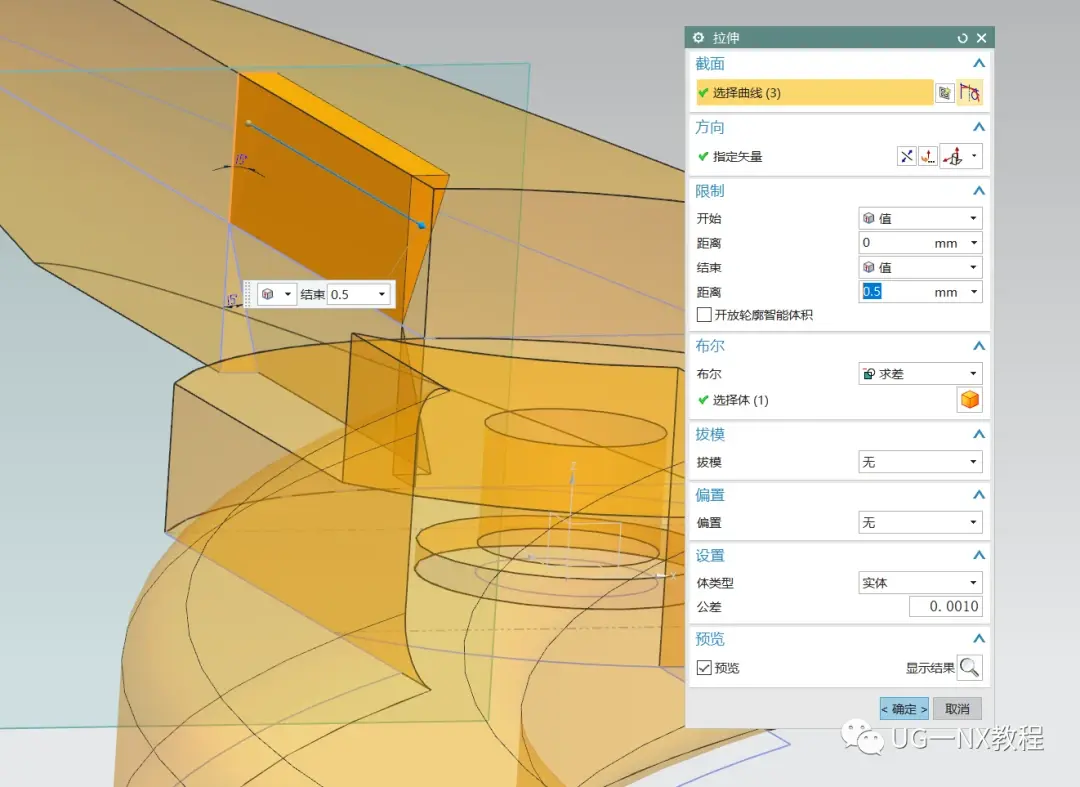
8.钳子上面都有个刀口,我们这里利用拉伸求差即可完成,新建基准面绘制草图,拉伸求差。
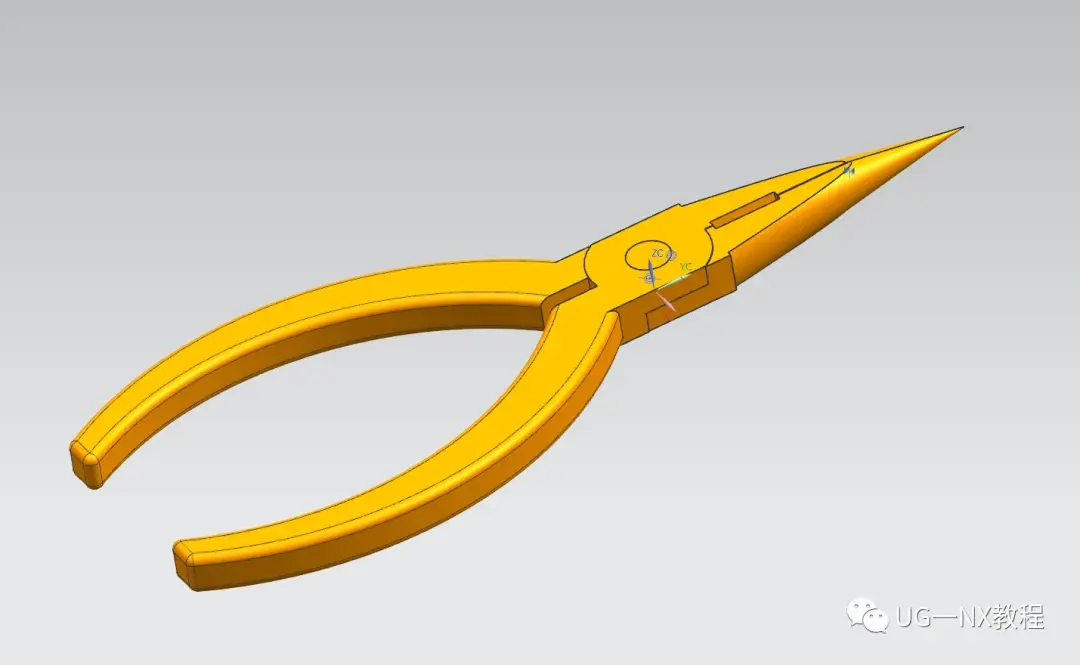
尖嘴钳的一边就完成了。

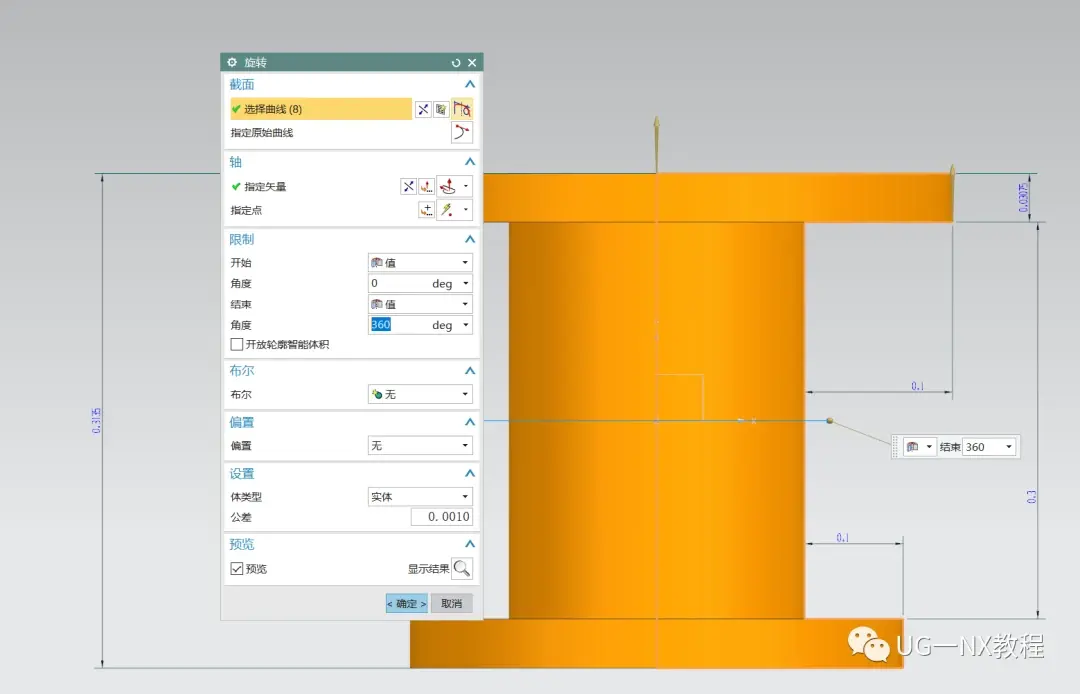
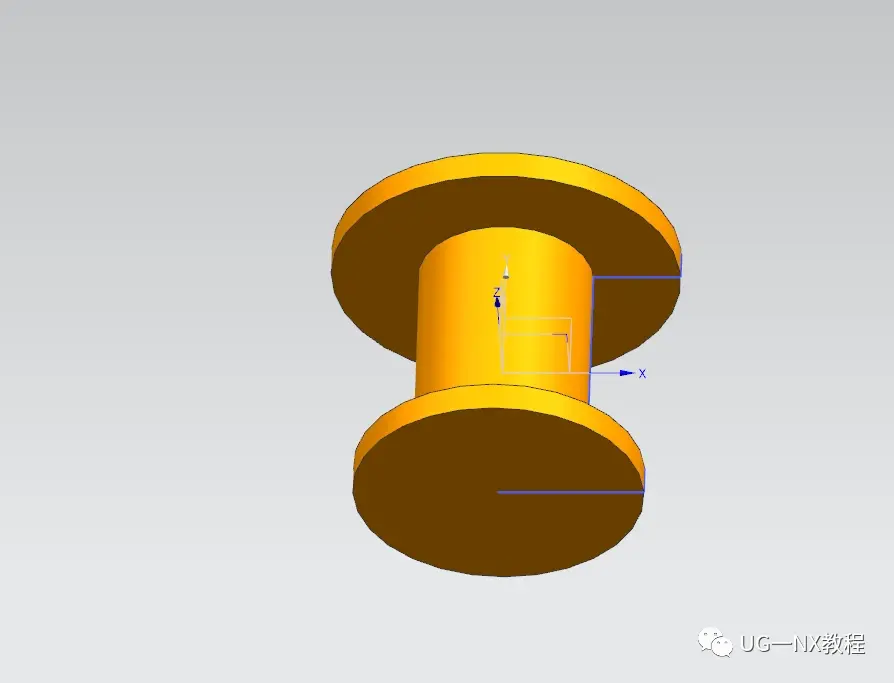
和剪刀不同,尖嘴钳的另一边可以是一模一样的,接下来我们只需要绘制链接的固定轴,只需一个旋转轻松搞定。
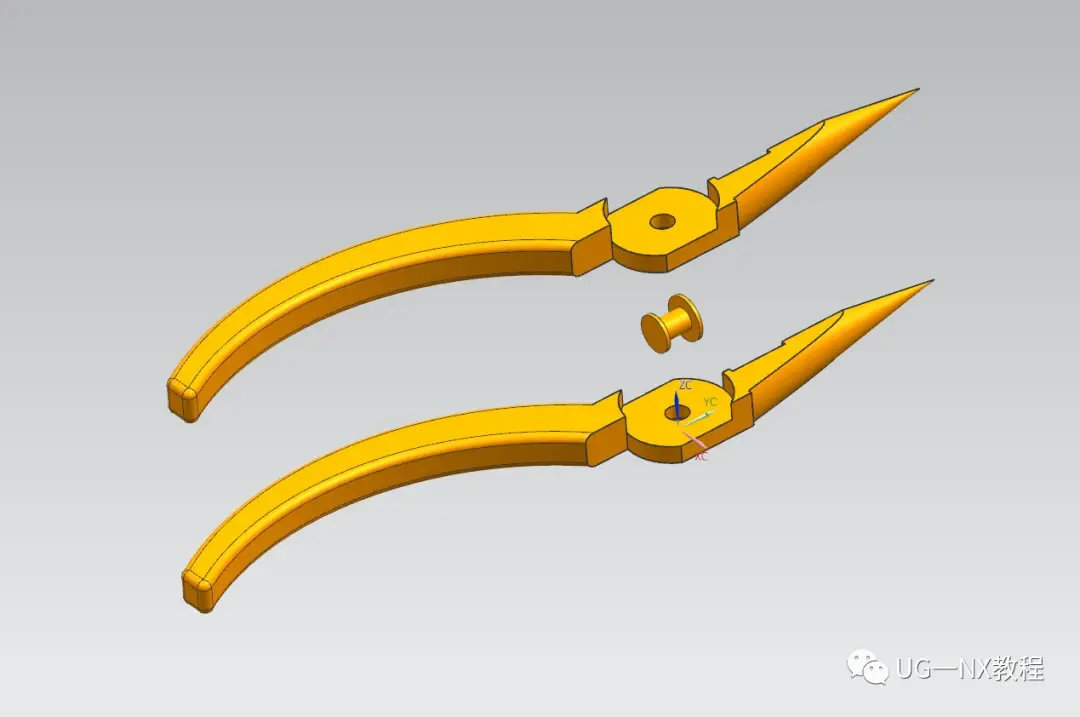
接下来进行装配,导入三个零件。
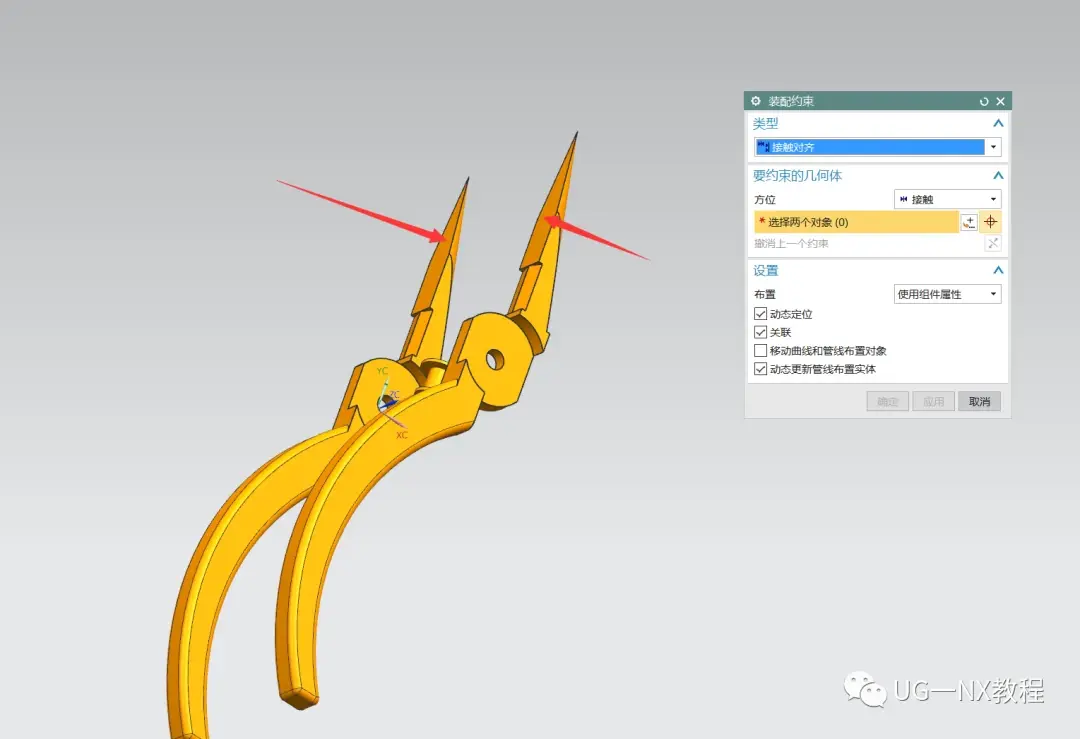
先利用接触对齐将这两个面接触
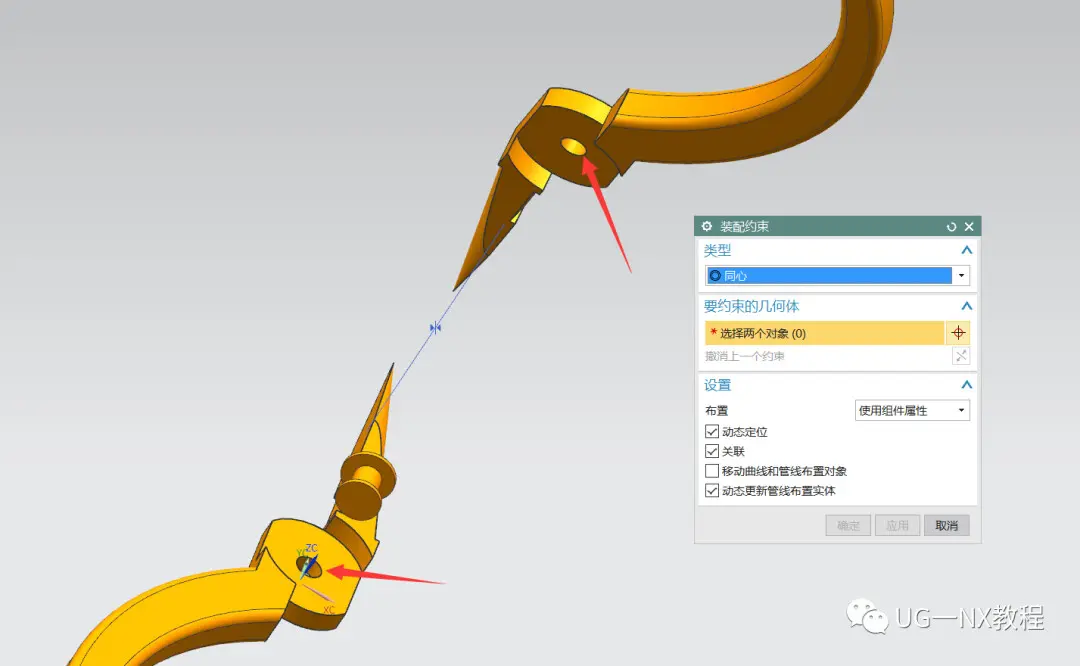
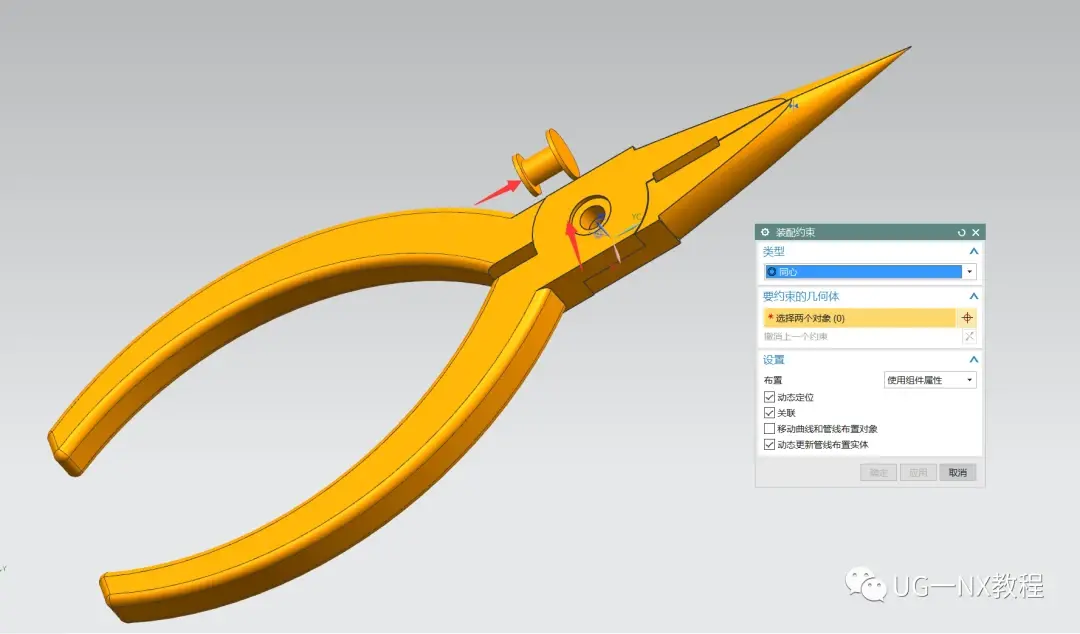
再利用同心约束将它们固定
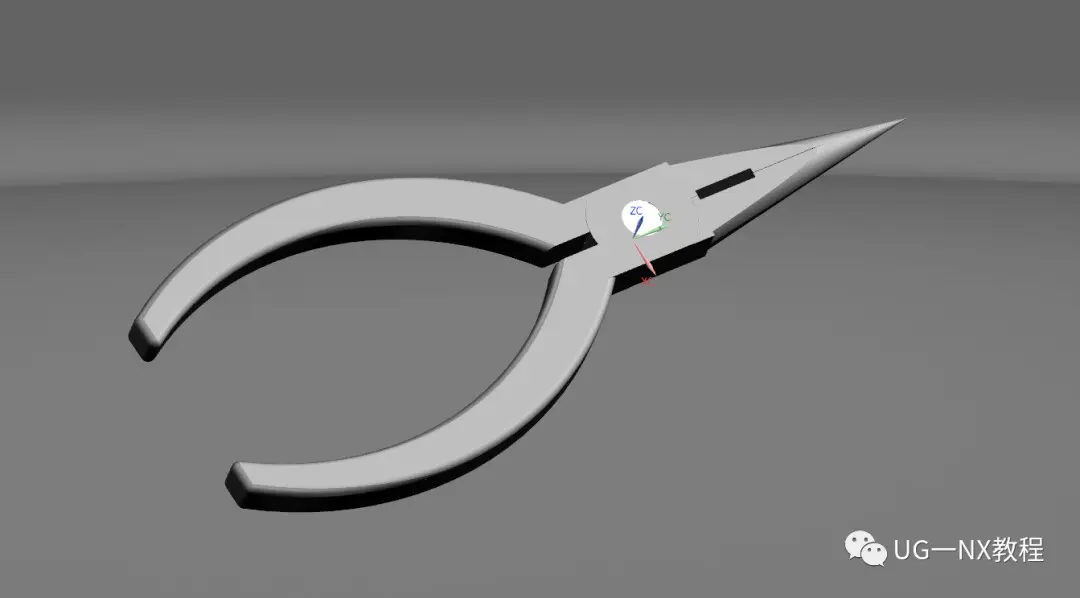
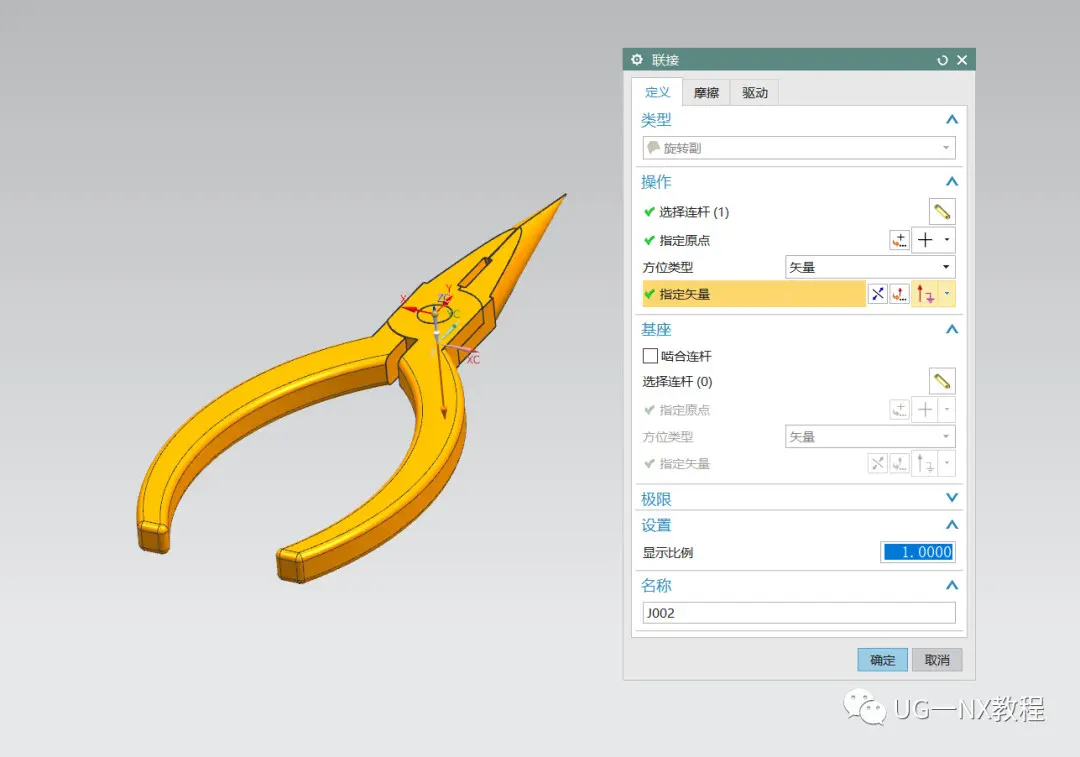
接下来做运动仿真,进入运动仿真模型,新建仿真,将三个零件选为连杆

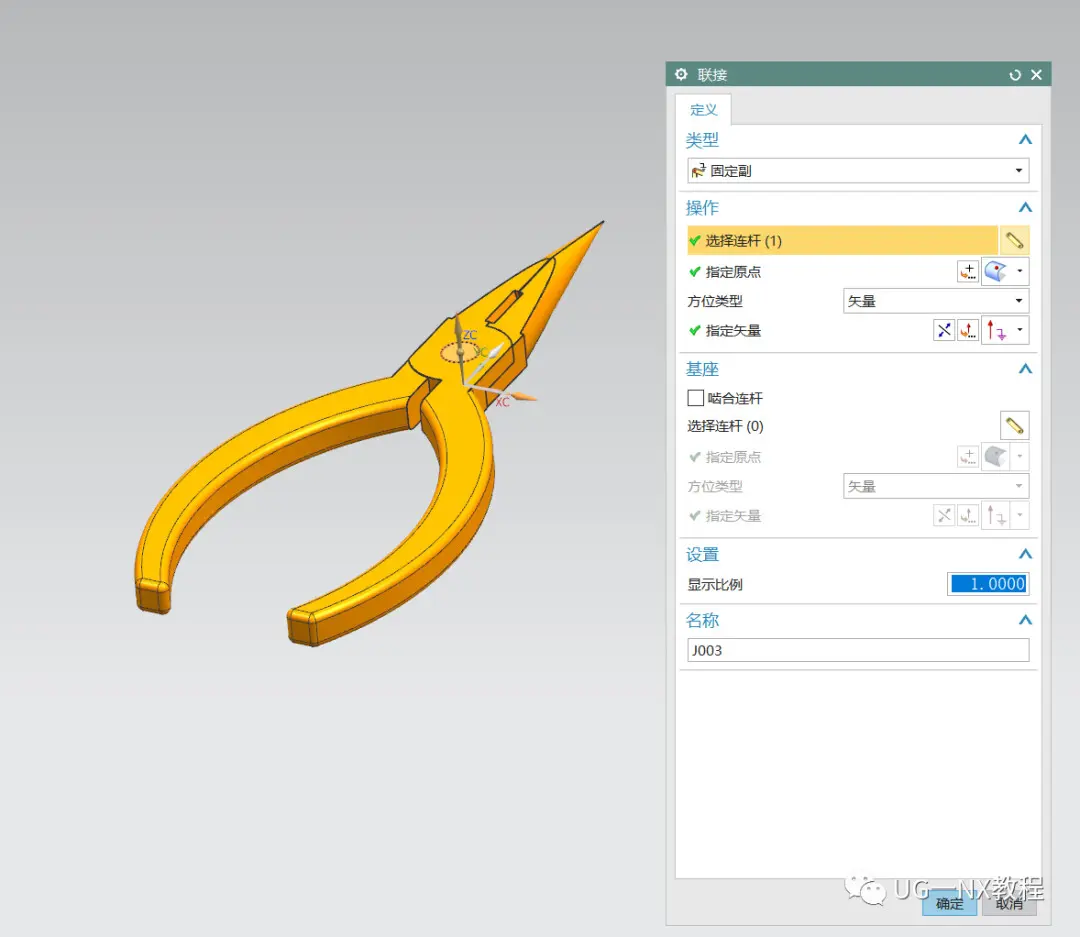
将连杆1固定
分别将连杆23做旋转副,注意连杆2和3的指定矢量需要相反
接下来设置驱动了,这里做简谐运动,幅值15度,频率为180,给两个旋转副都加上同样的驱动(上一步矢量选择相反的好处出来了)
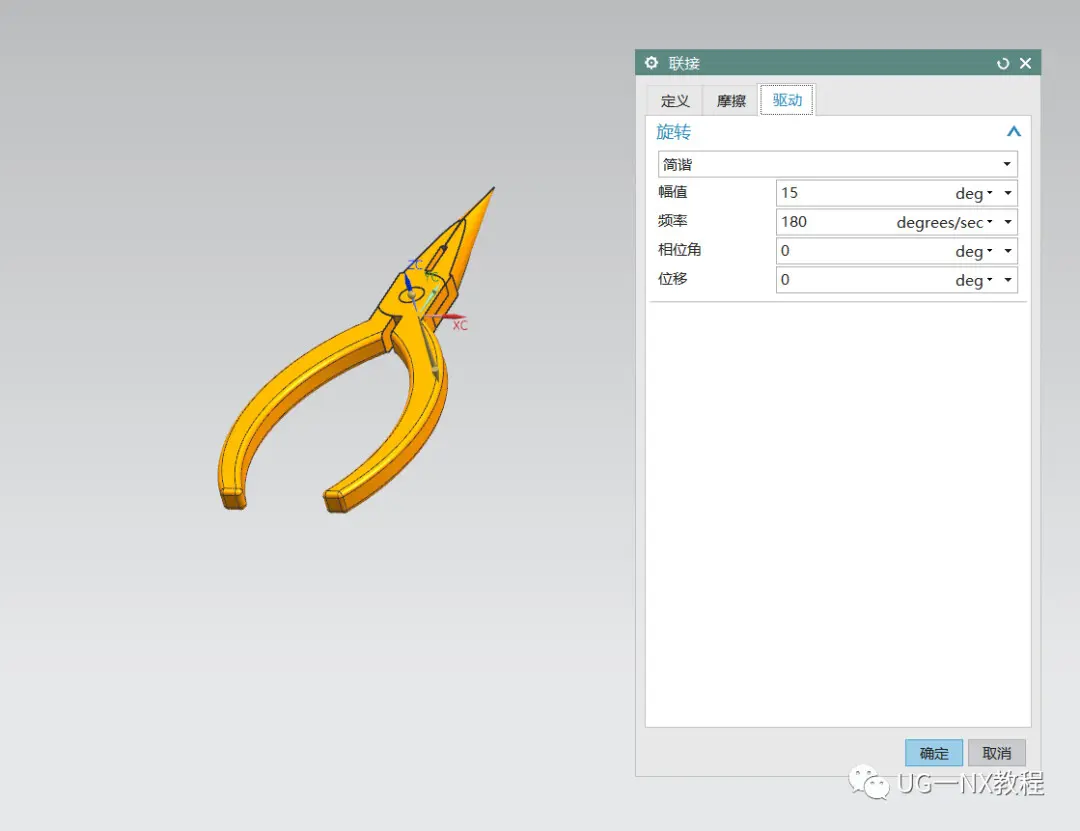
最后求解,就能播放动画了



武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















