















































软件

产品


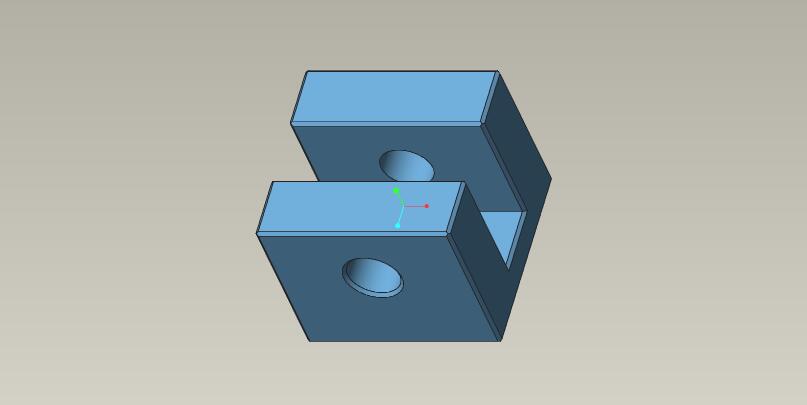
曲柄滑块机构是指用曲柄和滑块来实现转动和移动相互转换的平面连杆机构。曲柄滑块机构中与机架构成移动副的构件为滑块,通过转动副联接曲柄和滑块的构件为连杆。如图示为一曲柄滑块机构简图,现用Creo3.0进行运动仿真。
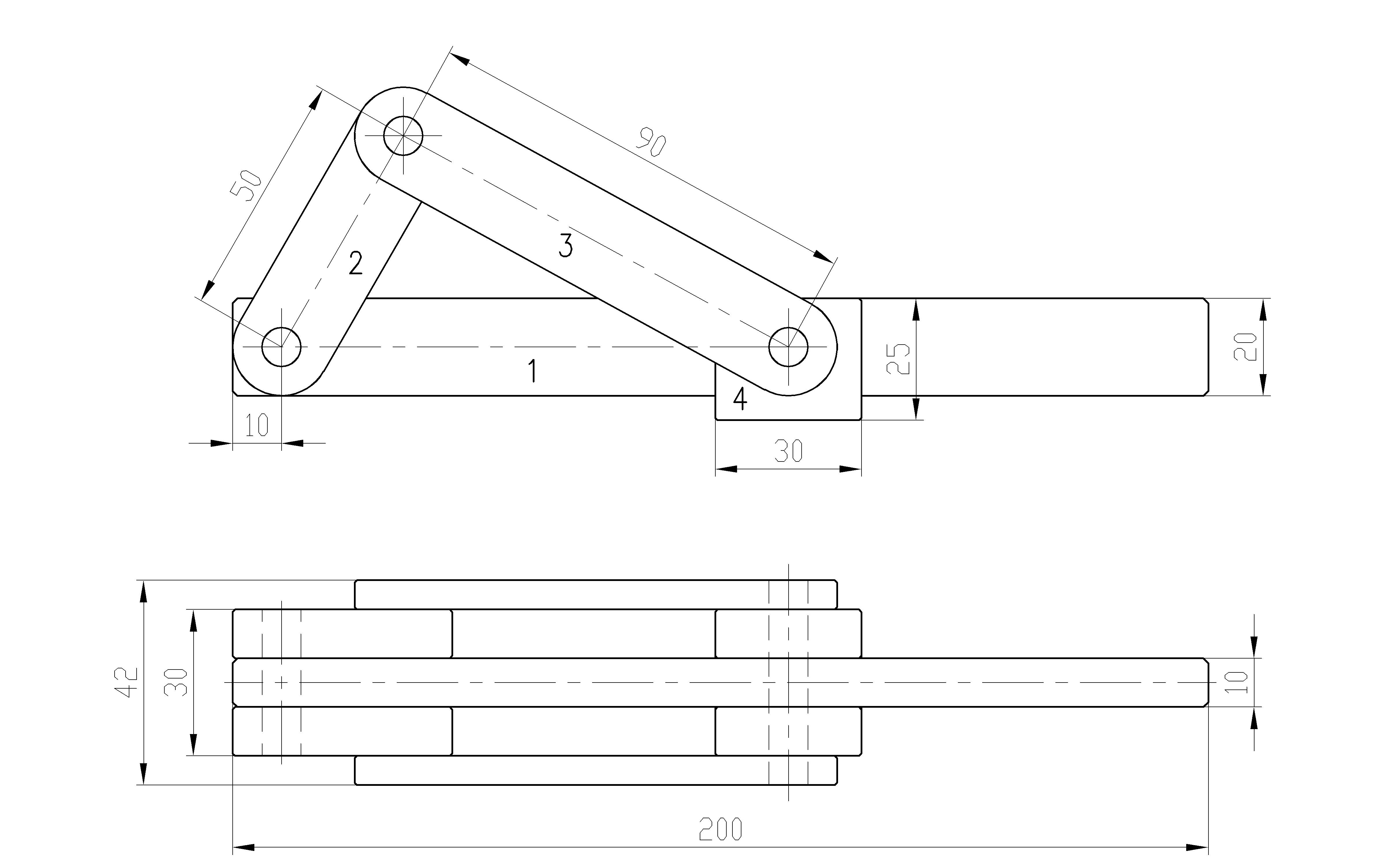
1导杆2曲柄3连杆4滑块
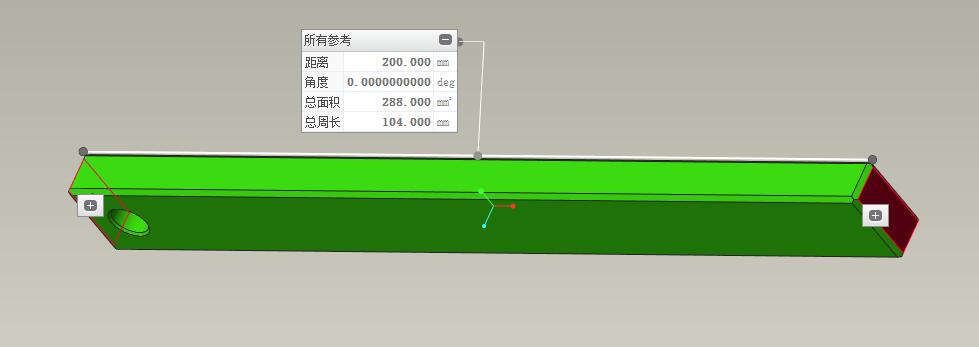
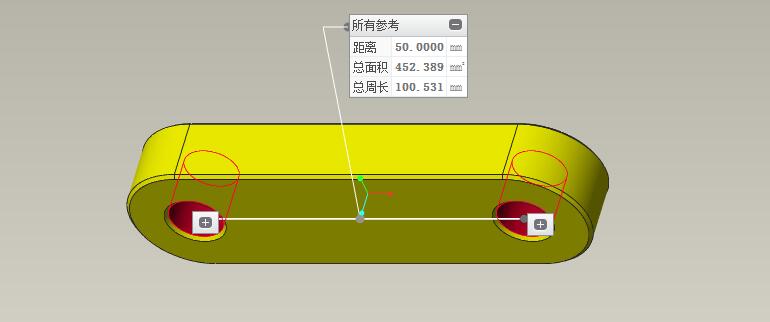
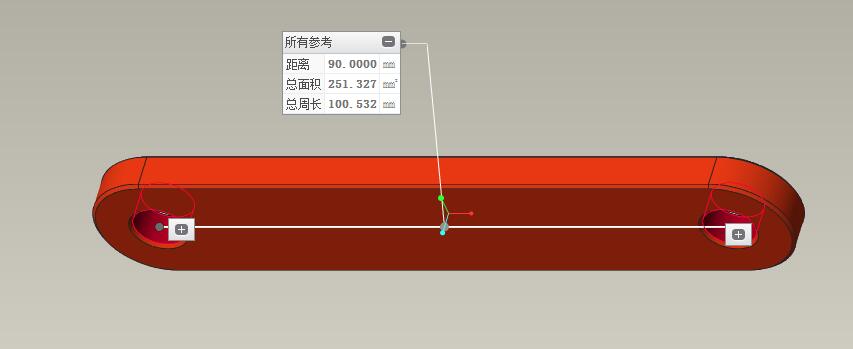
1.在做运动仿真前,先依次建立零件QBHK-01(导杆),QBHK-02(曲柄),QBHK-03(连杆),QBHK-04(滑块)。建模步骤略。
2.打开Creo3.0,新建文件,输入名称QBHK-00,点选装配/设计,选择mmns_asm_design模板,确定,进入装配模式。
3.调入QBHK-01,选择默认装配模式,确定,将导杆1固定为机架。

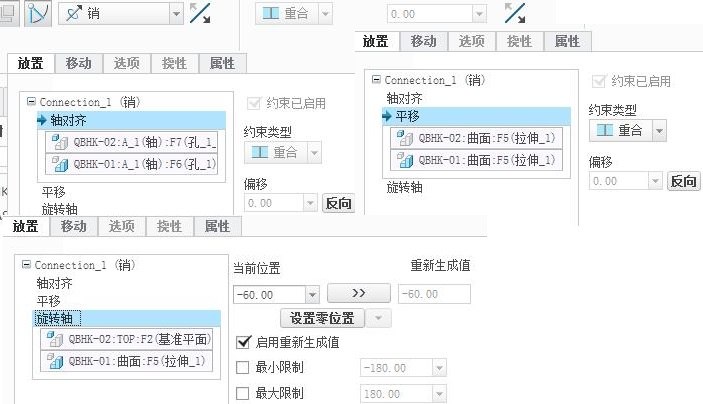
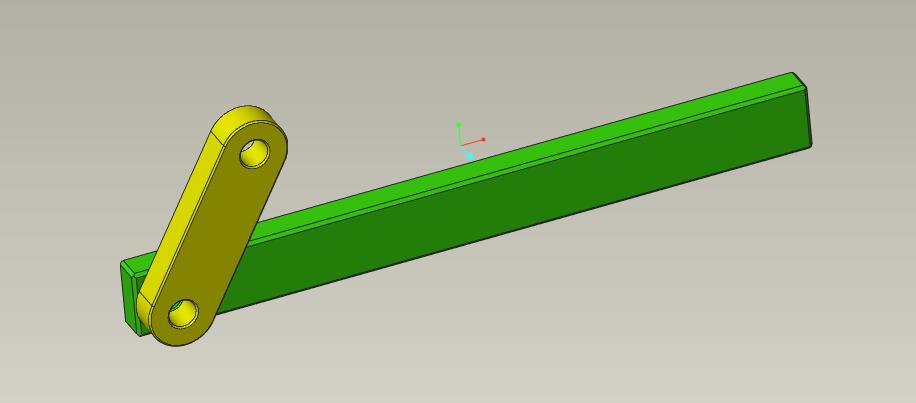
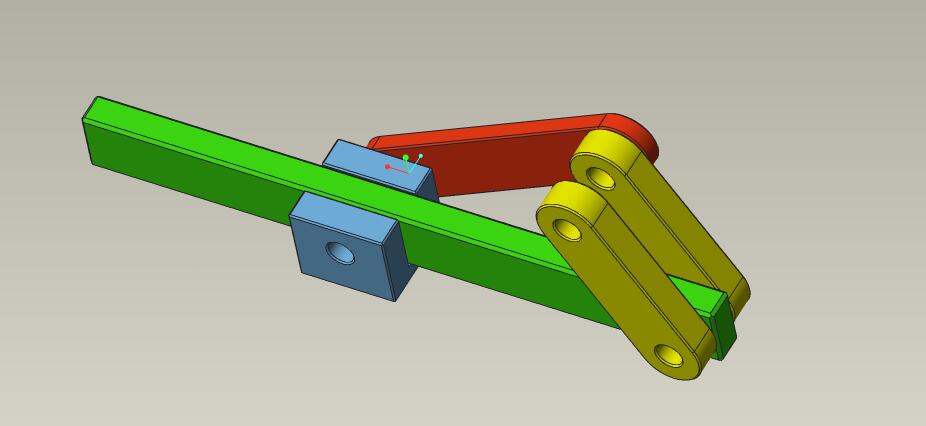
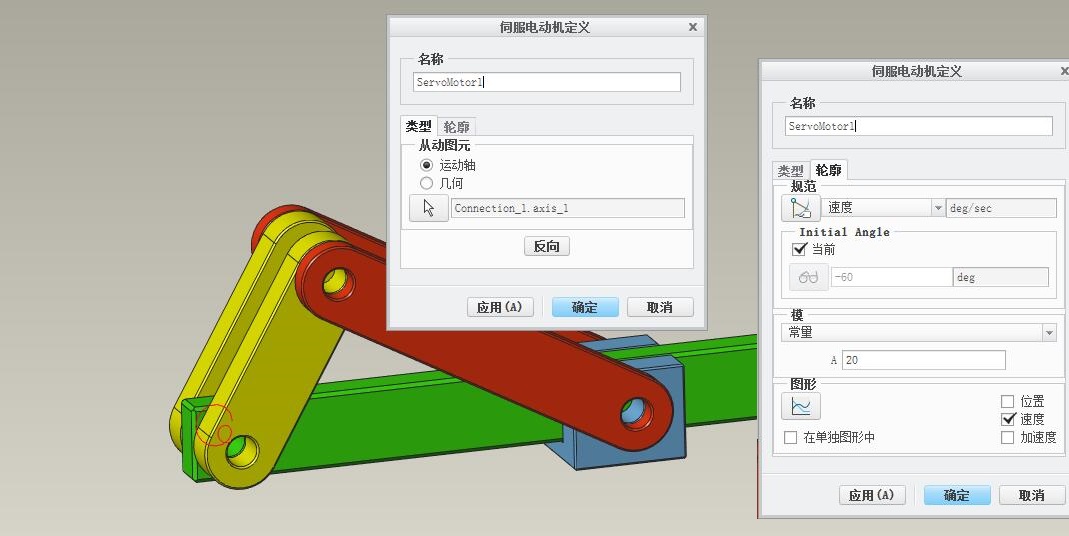
4.调入QBHK-02,销连接,轴对齐:将QBHK-02的一个轴孔中心线与QBHK-01的一个轴孔中心线对齐;平移:QBHK-02的内侧端面与QBHK-01的外侧端面重合;旋转轴:QBHK-02的TOP平面与QBHK-01的侧面角度设为-60,作为初始位置,完成QBHK-02装配。
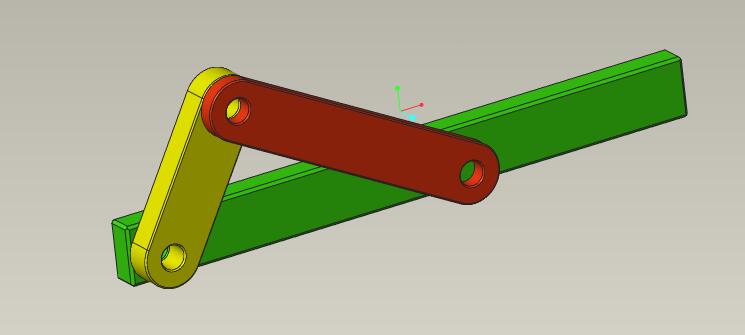
5.调入QBHK-03,销连接,轴对齐:将QBHK-03的一个轴孔中心线与QBHK-02的另一个轴孔中心线对齐;平移:QBHK-03的内侧端面与QBHK-02的外侧端面重合,不添加旋转轴约束,完成。

6.调入QBHK-04,添加重合约束,QBHK-04的槽底面分别与QBHK-01的底面重合,QBHK-04的FRONT与QBHK-01的FRONT面重合,QBHK-04的孔与QBHK-03的另一孔重合。


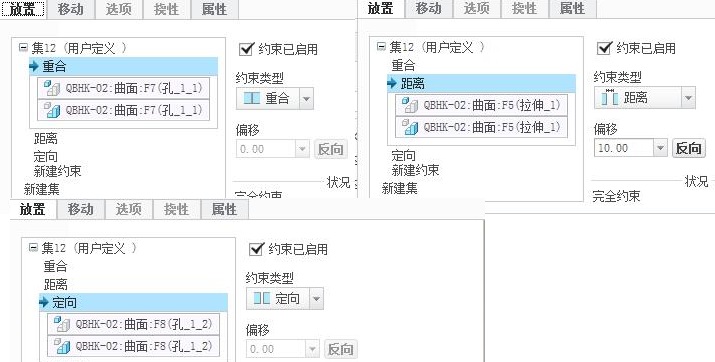
7.再在另一侧装入QBHK-02,调入QBHK-02,使两个QBHK-02的一个孔重合,另一个孔定向,端面距离为10,完成。
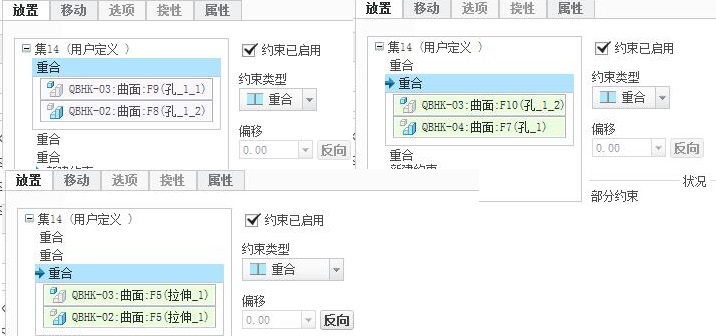
8.再调入QBHK-03,使QBHK-03的两个孔分别与QBHK-02,QBHK-04的另一个孔重合,QBHK-03的端面与QBHK-02的端重合。
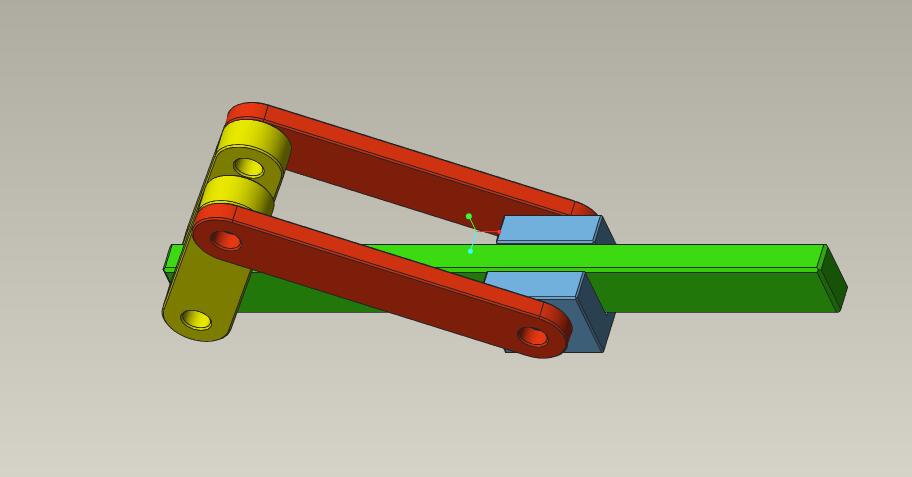
9.进入应用程序/机构,类型选择杆2第一个轴孔轴线为运动轴,轮廓选择速度,常量A为20,单位为deg/sec,即转一圈360°需要18s。
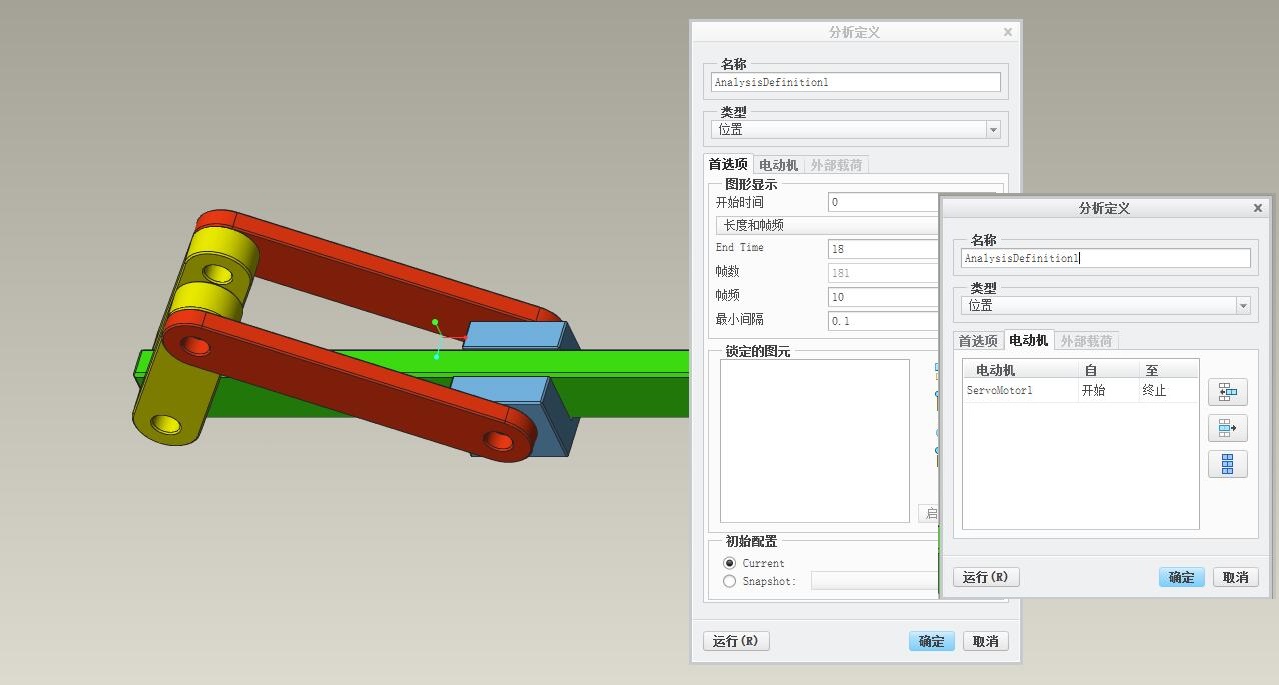
10.新建分析,首选项将将结束时间设为18s,再选择电动机,运行。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















