















































软件

产品


关于自由度
完全不受约束的刚性主体有六个自由度:三个平移自由度和三个旋转自由度。各个约束都按特定的方式来限制运动。例如,如果对一个刚性主体应用销钉连接 (仅允许围绕轴进行旋转运动),则该刚性主体的自由度将从六减少到一。
常规连接和 6DOF 连接
使用常规连接可表示 DOF 与要定义给特定元件的 DOF 相同的那些连接。会存在常规连接与其他连接具有相同 DOF 数量的情况 (例如,球、圆柱或销钉连接)。创建常规连接后,它会作为坐标系出现在模型中。其 DOF 将显示为平移和旋转箭头。
如果下图看不清楚,则可以看最下面的纯文本
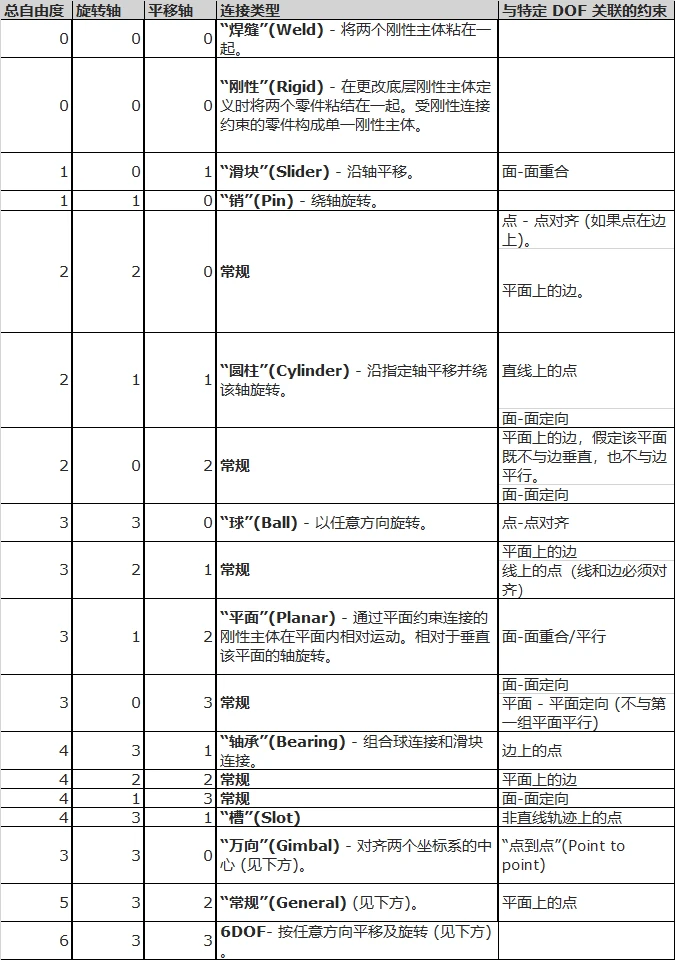
总自由度 旋转轴 平移轴 连接类型 与特定 DOF 关联的约束
0 0 0 “焊缝”(Weld) - 将两个主体粘在一起。
0 0 0 “刚性”(Rigid) - 在更改底层主体定义时将两个零件粘结在一起。受刚性连接约束的零件构成单一主体。
1 0 1 “滑块”(Slider) - 沿轴平移。 面-面重合
1 1 0 “销”(Pin) - 绕轴旋转。
2 2 0 一般 点 - 点对齐 (如果点在边上)。
平面上的边。
2 1 1 “圆柱”(Cylinder) - 沿指定轴平移并绕该轴旋转。 直线上的点
面-面定向
2 0 2 一般 平面上的边,假定该平面既不与边垂直,也不与边平行。
面-面定向
3 3 0 “球”(Ball) - 以任意方向旋转。 点-点对齐
3 2 1 一般 平面上的边
线上的点(线和边必须对齐)
3 1 2 “平面”(Planar) - 通过平面约束连接的主体在平面内相对运动。相对于垂直该平面的轴旋转。 面-面重合/平行
3 0 3 一般 面-面定向
平面 - 平面定向 (不与第一组平面平行)
4 3 1 “轴承”(Bearing) - 组合球连接和滑块连接。 边上的点
4 2 2 一般 平面上的边
4 1 3 一般 面-面定向
4 3 1 “槽”(Slot) 非直线轨迹上的点
3 3 0 “万向”(Gimbal) - 对齐两个坐标系的中心 (见下方)。 “点到点”(Point to point)
5 3 2 “常规”(General) (见下方)。 平面上的点
6 3 3 6DOF- 按任意方向平移及旋转 。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















