















































软件

产品


world即世界,gazebo的world文件就是用于描述世界模型的,也就是环境模型。
Gazebo已经为我们准备了很多常用的物体模型,除了基础的圆球,圆柱,立方体外的,其实还有飞机、汽车、房子等你现实中无法拥有的。
但是一开始安装Gazebo的时候并不会帮你下载好这些模型,需要我们手动下载,万幸的是小鱼已经帮你封装成了一行代码下载指令,打开终端,复制粘贴下面这句
cd ~/.gazebo && wget https://gitee.com/ohhuo/scripts/raw/master/gazebo_model.py && python3 gazebo_model.py
然后等待脚本运行完成,当然也不用等它完成,因为一共有281个模型,是逐一下载并解压到~/.gazebo/models/目录的。
此时再次打开终端,输入gazebo,把选项卡切换到Insert
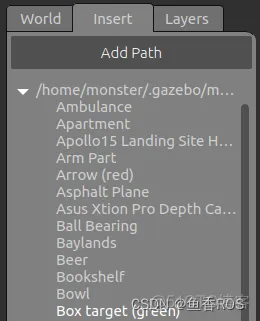
在Insert选项卡下可以看到一个目录,以及目录下的模型名称,随着下载脚本的不断下载,这里的模型会越来越多。
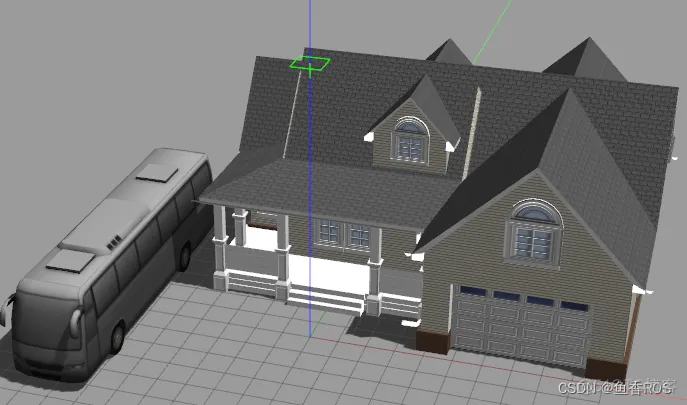
随手拖几个,搭建一个漂亮的环境出来~
每个成功的男人都有一辆车,小鱼也不例外
上面是Gazebo为我们准备好的开源模型,我们也可以通过Gazebo的工具来自己画一个环境。
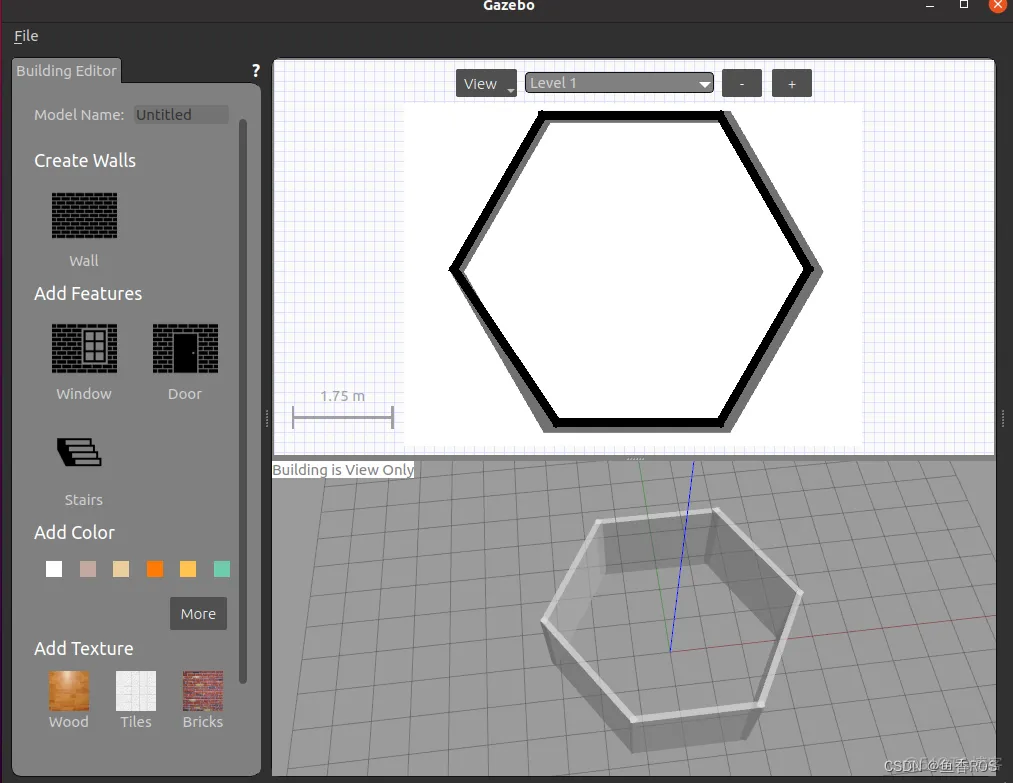
Gazebo左上角->Edit->Building Editor
接着可以看到这样一个编辑界面
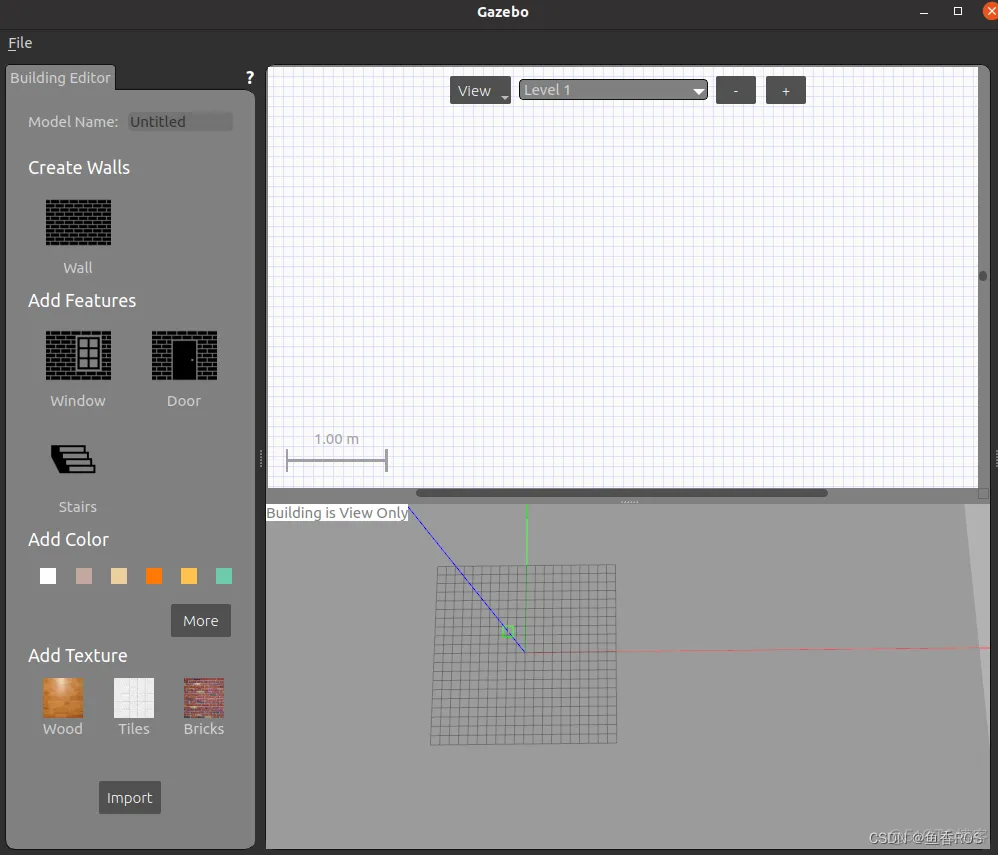
点击左边的Wall,你就可以在上方的白色区域进行建墙了。
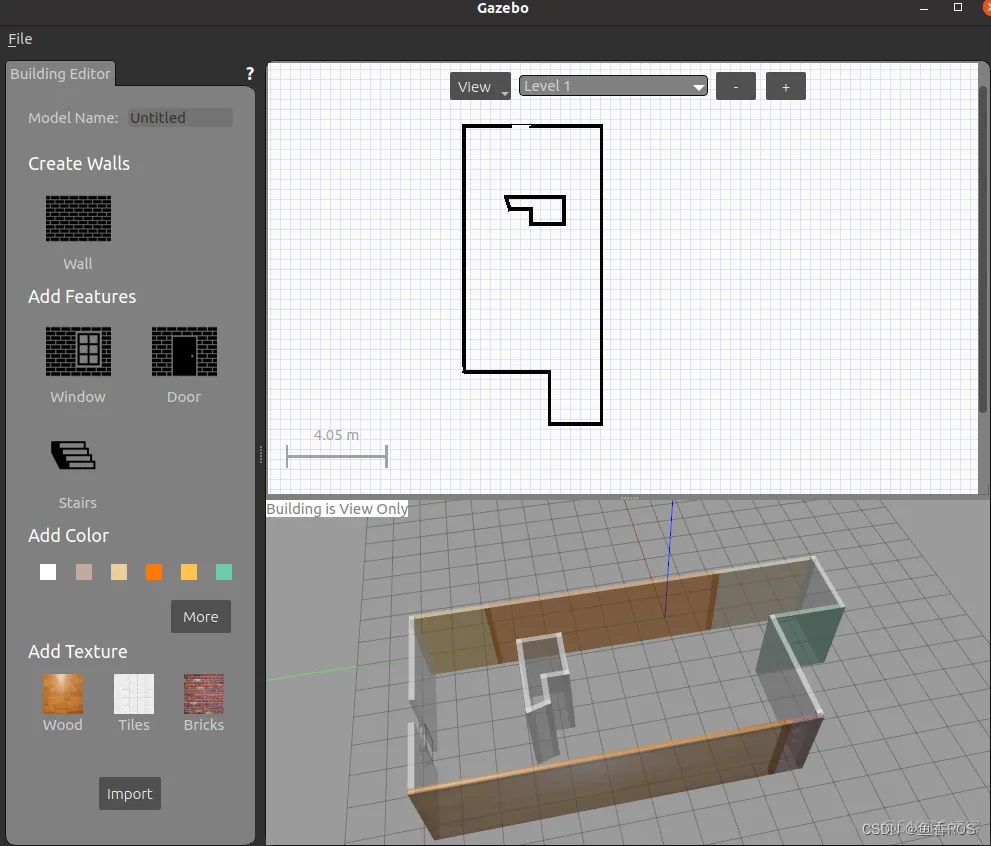
建完后还可以用选Add Color或者Add Texture,然后点击下方墙,给墙添加颜色或者纹理。
首先你要有一个地图,小鱼为你准备了两个,两个图片都是800*600像素的。
打开Gazebo->Gazebo左上角->Edit->Building Editor->左下方选Import
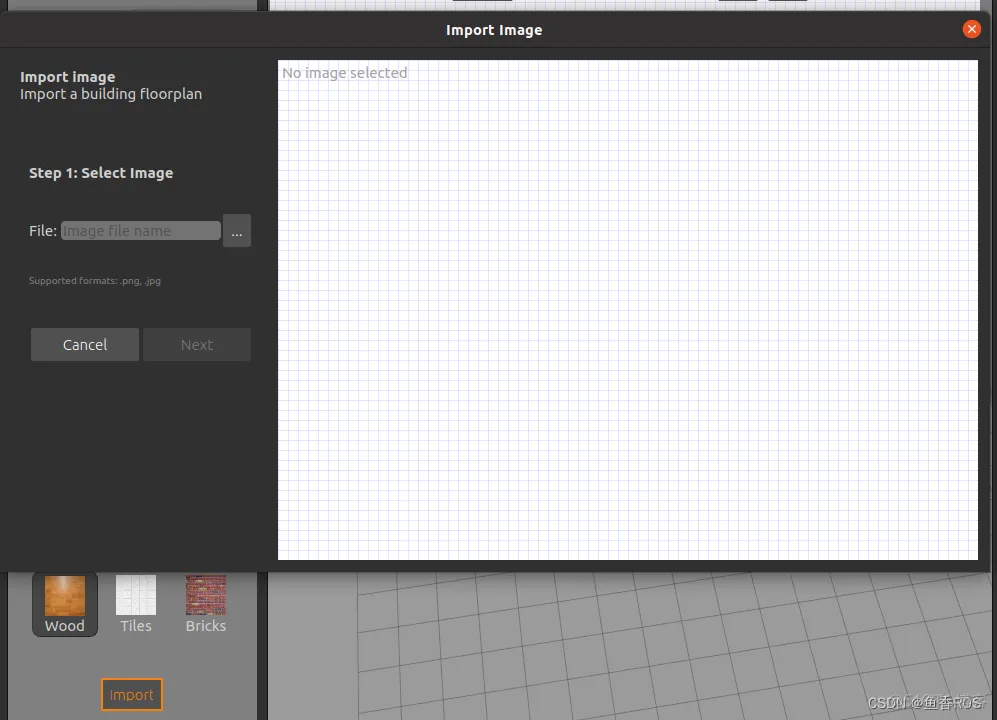
将上面两个图片存到本地,在这个界面选图片,记着选Next
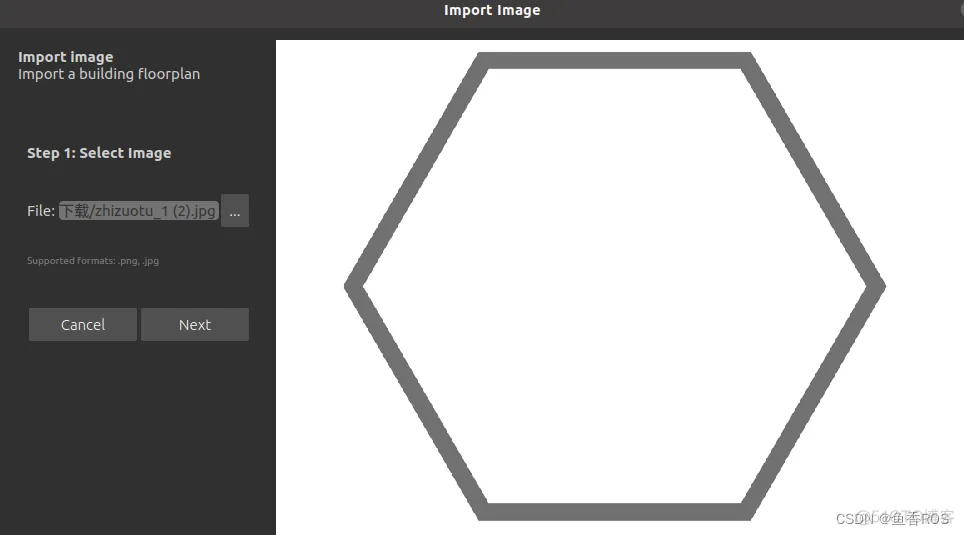
左边选尺寸对应关系
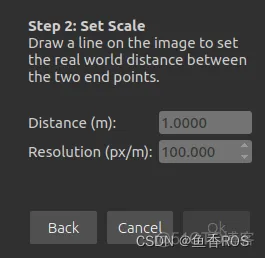
我们选择默认的,100像素/米。点击OK(需要手动将100改变一下才能点击OK哦),之后就可以用图片画墙了。
注意:导入完图片不会直接出来墙,图片只是提供了墙的大概位置,需要你手动用墙再将边描一遍。
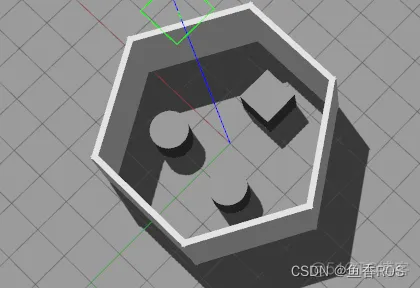
建完后点击File->Exit,在退出的弹框中选Exit。
接着在Gazebo界面中就可以看到墙了,我们再手动添加几个物体,就可以用于下面的导航使用了。
添加完,接着点击File->SaveWorld,将文件保存到我们的fishbot_descrption的world下。
没有world目录的小伙伴可以先手动创建下

点击右上角Sace,在文件夹就可以看到这个world文件

加载world其实也很简单,可以先启动Gazebo,再手动的加载文件,也可以在Gazebo启动时加载:
比如在前面加载ROS2插件基础上再加载fishbot.world。
gazebo --verbose -s libgazebo_ros_init.so -s libgazebo_ros_factory.so 你的world文件目录/fishbot.world
修改launch文件,将上面的命令行写到gazebo.launch.py中即可。
gazebo_world_path = os.path.join(pkg_share, 'world/fishbot.world')
# Start Gazebo server
start_gazebo_cmd = ExecuteProcess(
cmd=['gazebo', '--verbose','-s', 'libgazebo_ros_init.so', '-s', 'libgazebo_ros_factory.so', gazebo_world_path],
output='screen')
最后记得修改setup.py文件,让编译后将world文件拷贝到install目录下
添加一行
(os.path.join('share', package_name, 'world'), glob('world/**')),
添加完后
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
(os.path.join('share', package_name, 'launch'), glob('launch/*.launch.py')),
(os.path.join('share', package_name, 'urdf'), glob('urdf/**')),
(os.path.join('share', package_name, 'world'), glob('world/**')),
],
colcon build
source install/setup.bash
ros2 launch fishbot_description gazebo.launch.py
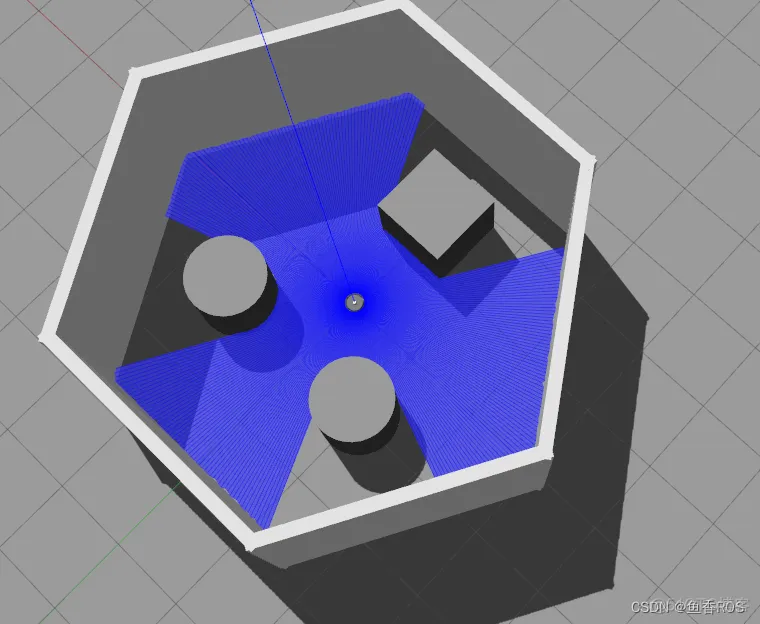
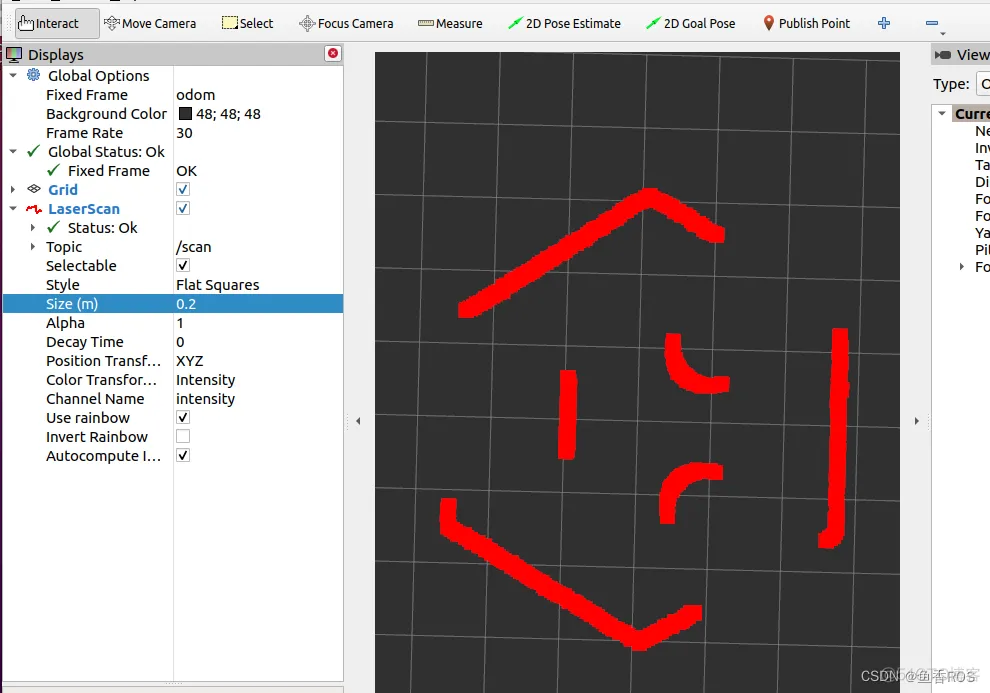
打开RVIZ2看看雷达
本节我们实现了在Gazebo中简单的搭建了一个环境,下节我们就开始对SLAM建图进行介绍。
课后作业:
正确答案如下(小鱼的环境):

免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















