















































软件

产品


机器人的系统仿真是一种集成实现,主要包含三部分:
URDF 用于创建机器人模型:以XML 的方式描述机器人的部分结构,比如底盘、摄像头、激光雷达、机械臂以及不同关节的自由度。可被 C++ 内置的解释器转换成可视化的机器人模型。
Gzebo 用于搭建仿真环境:3D动态模拟器,显示机器人模型并创建仿真环境,能够在复杂的室内和室外环境中准确有效地模拟机器人。与游戏引擎提供高保真度的视觉模拟类似,Gazebo提供高保真度的物理模拟,其提供一整套传感器模型,以及对用户和程序非常友好的交互方式。
Rviz 图形化显示传感器感知到的环境信息:ROS的三维可视化工具。以三维方式显示ROS消息,将数据进行可视化表达。例如:可以显示机器人模型,可以无需编程就能表达激光测距仪(LRF)传感器中的传感 器到障碍物的距离,RealSense、Kinect或Xtion等三维距离传感器的点云数据(PCD, Point Cloud Data),从相机获取的图像值
需求描述:
在 Rviz 中显示一个盒状机器人
实现流程:
创建一个新的功能包,名称自定义,导入依赖包: urdf与xacro
在当前功能包下,再新建几个目录:
urdf: 存储 urdf 文件的目录
meshes:机器人模型渲染文件(暂不使用)
config: 配置文件
launch: 存储 launch 启动文件

新建一个子级文件夹:urdf(可选),文件夹中添加一个.urdf文件,复制如下内容:
<robot name="mycar">
<link name="base_link">
<visual>
<geometry>
<box size="0.5 0.2 0.1" />
</geometry>
</visual>
</link>
</robot>1.2.3.4.5.6.7.8.9.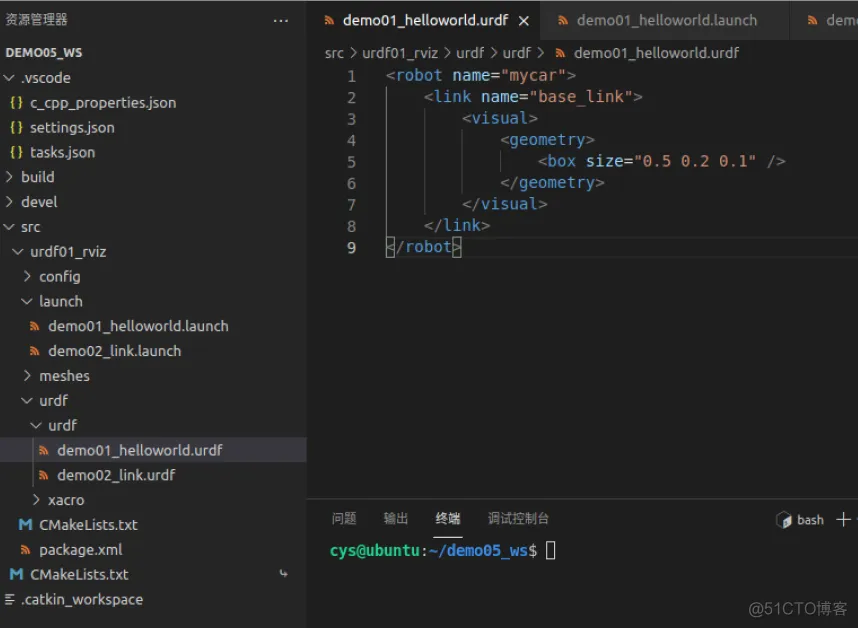
在launch目录下,新建一个 launch 文件,该 launch 文件需要启动 Rviz,并导入 urdf 文件,Rviz 启动后可以自动载入解析urdf文件,并显示机器人模型,核心问题:如何导入 urdf 文件? 在 ROS 中,可以将 urdf 文件的路径设置到参数服务器,使用的参数名是:robot_description,示例代码如下:
<launch>
<!-- 设置参数 -->
<param name="robot_description" textfile="$(find 包名)/urdf/urdf/urdf01_HelloWorld.urdf" />
<!-- 启动 rviz -->
<node pkg="rviz" type="rviz" name="rviz" />
</launch>1.2.3.4.5.6.7.8.9.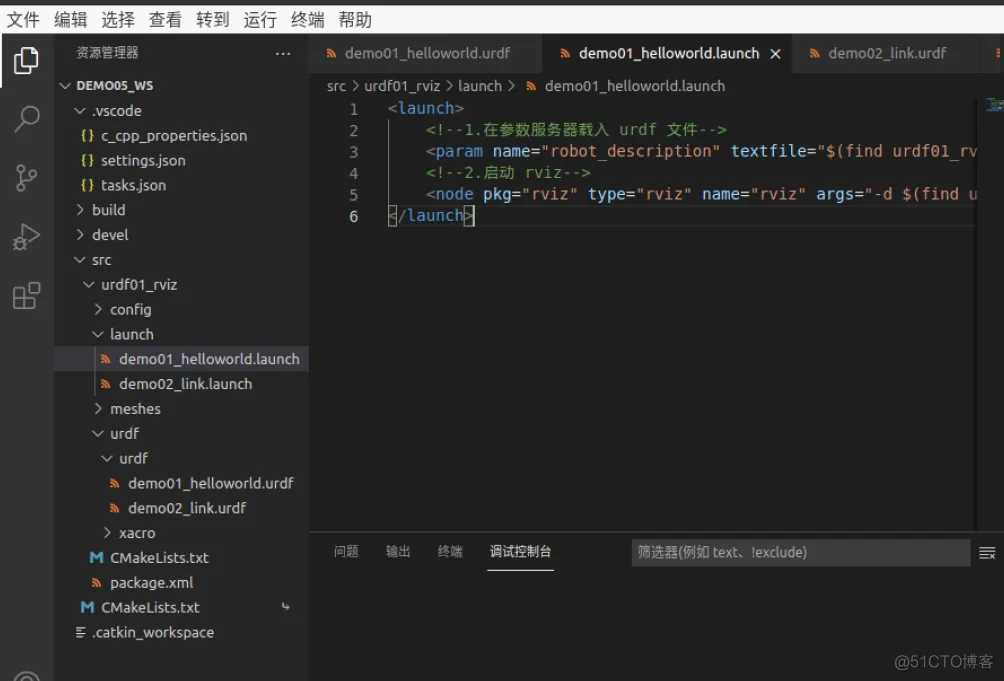
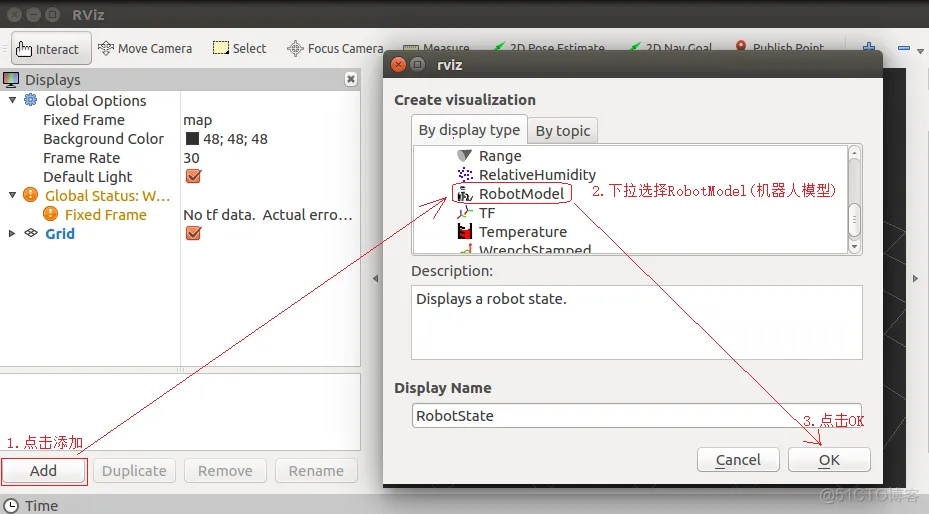
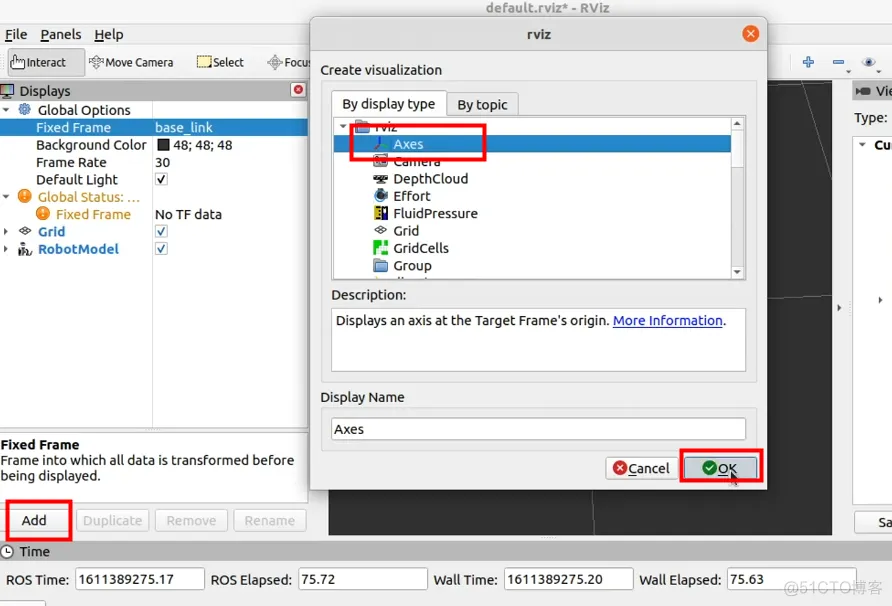
rviz 启动后,会发现并没有盒装的机器人模型,这是因为默认情况下没有添加机器人显示组件,需要手动添加,添加方式如下: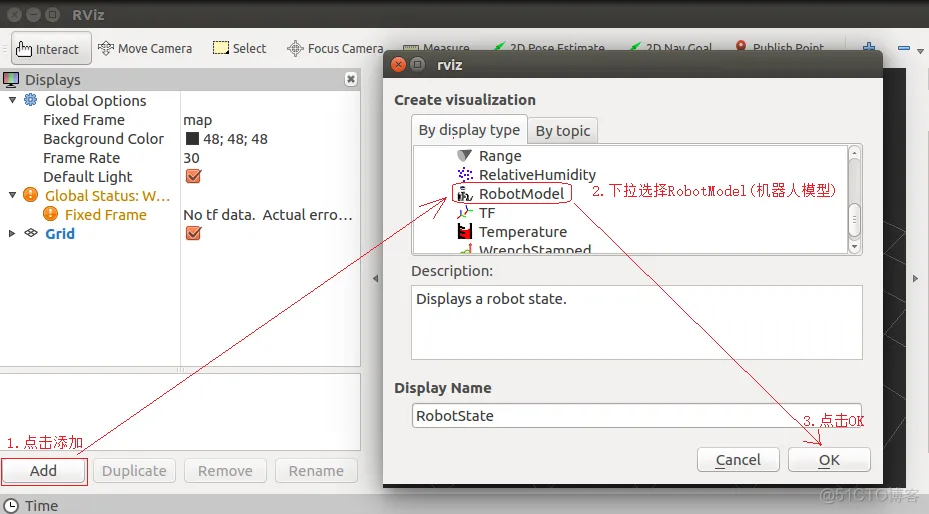
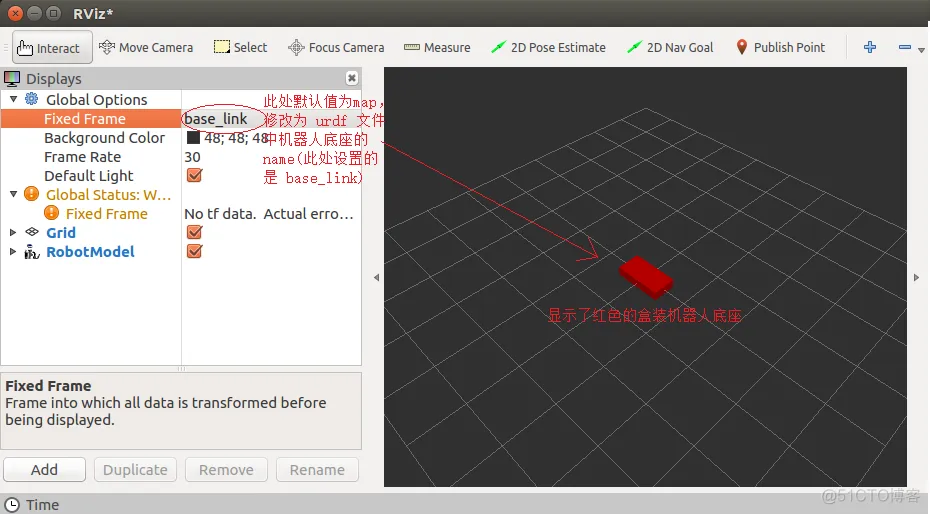
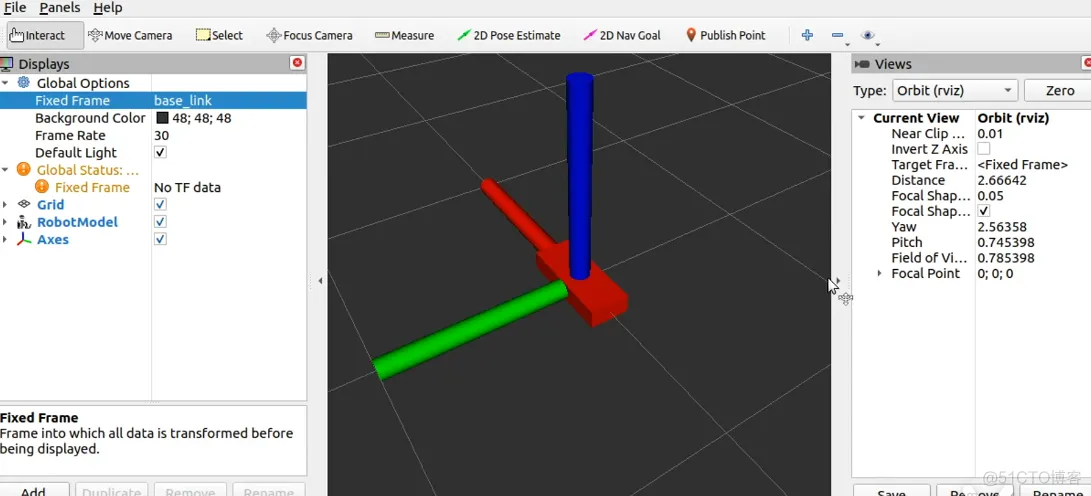
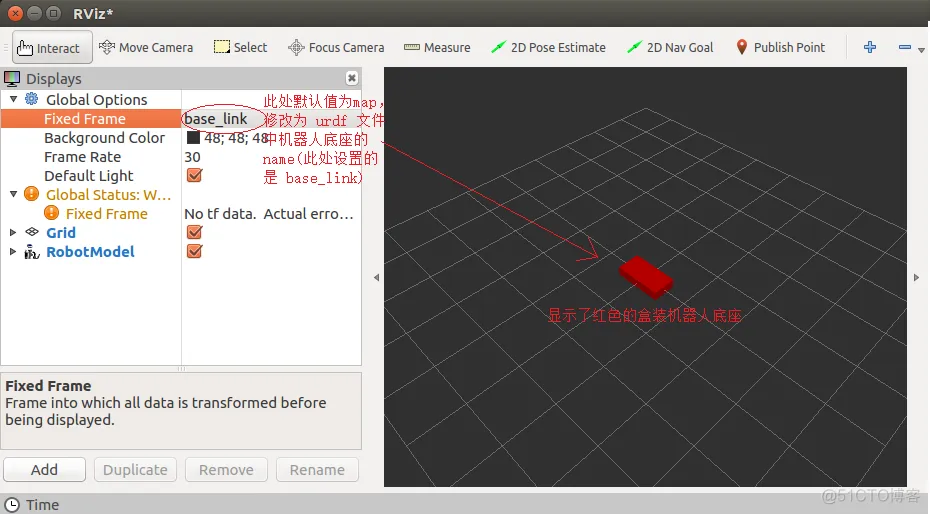 设置完毕后,可以正常显示了
设置完毕后,可以正常显示了

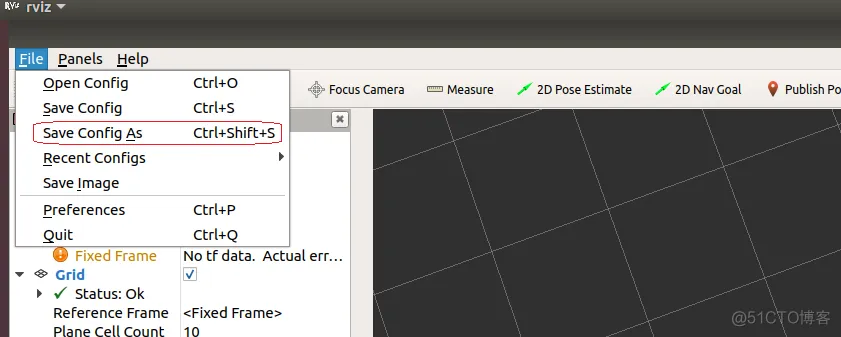
重复启动launch文件时,Rviz 之前的组件配置信息不会自动保存,需要重复执行步骤4的操作,为了方便使用,可以使用如下方式优化:
首先,将当前配置保存进config目录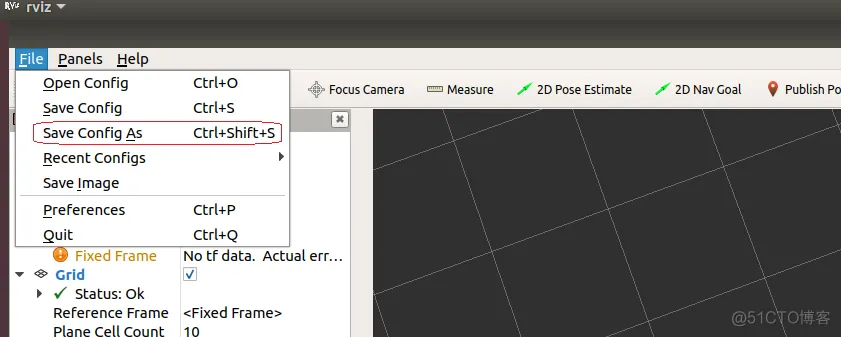 然后,
然后,launch文件中 Rviz 的启动配置添加参数:args,值设置为-d 配置文件路径
<launch>
<!--1.在参数服务器载入 urdf 文件-->
<param name="robot_description" textfile="$(find urdf01_rviz)/urdf/urdf/demo01_helloworld.urdf" />
<!--2.启动 rviz-->
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find urdf01_rviz)/config/show_mycar.rviz"/>
</launch>1.2.3.4.5.6.再启动时,就可以包含之前的组件配置了,使用更方便快捷。
添加坐标系
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















