















































软件

产品


上一期介绍了如何在RobotStudio软件中创建输送带,并实现输送带自动输送物料。本期将在上一期创建的虚拟仿真环境中添加ABB机器人,用来实现机器人对输送带上的物料进行跟踪,这一功能也被称为机器人输送带跟踪。
从RobotStudio软件自带的机器人模型库中添加一台机器人,然后从软件设备模型库中添加工具模型AW_Gun_PSF_25,并将工具安装到机器人上。

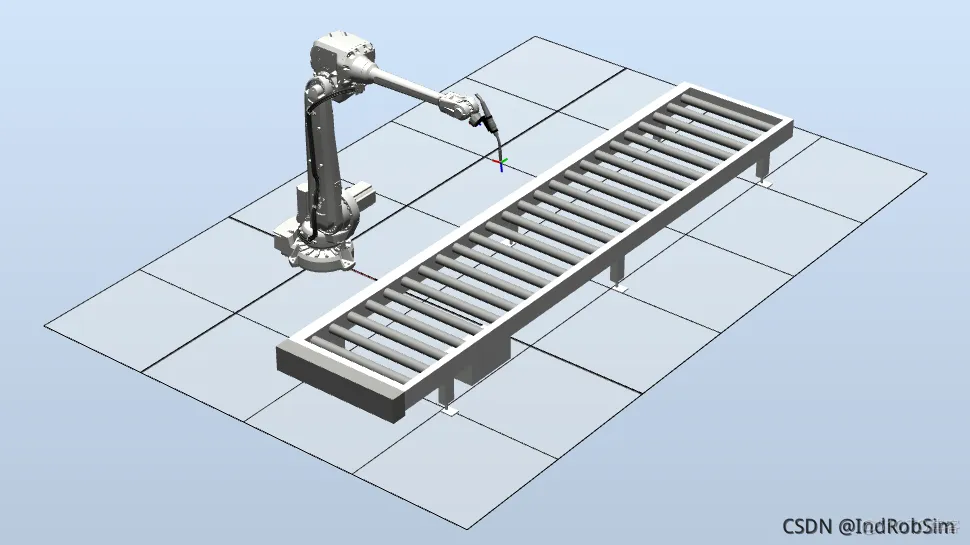
将输送带位置调整到机器人可达范围内,使得工件在输送带上传送时机器人能够在工件上完成加工任务。

创建好的机器人输送带跟踪简易工作站如下图所示。
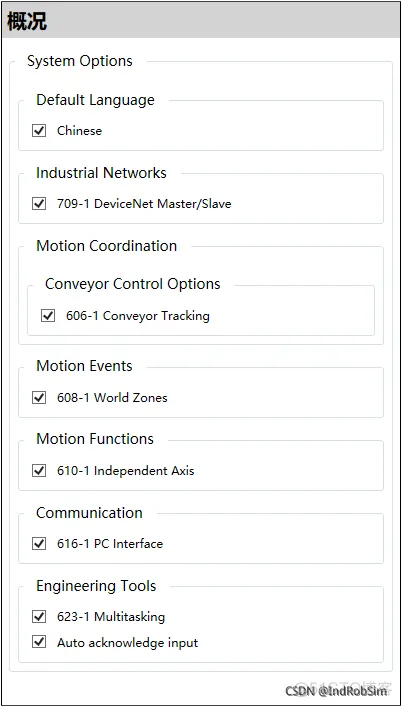
从布局生成机器人系统,系统选项参数中除了常规的机器人系统语言与I/O信号网络以外,还要选择输送带跟踪功能选项“606-1 Conveyor Tracking”,同时系统会要求额外选择“1552-1 Tracking Unit Interface”或“Conveyor Tracking on PIB”,任意选择其中一个选项即可,本例选择“Conveyor Tracking on PIB”。
在“建模”菜单栏的“机械”命令组中,点击“创建连接”

命令按钮,弹出创建连接对话框。
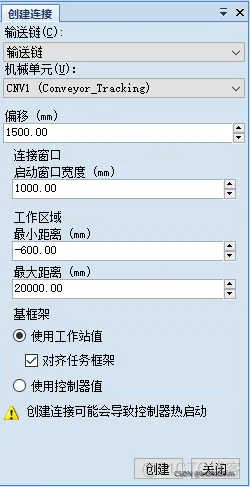
在此对话框中可以配置机器人控制器与输送带之间的跟踪连接关系,各个属性参数含义如下:
输送链:选择要连接机器人控制器的输送链。
机械单元:选择要连接输送链的机器人控制器。
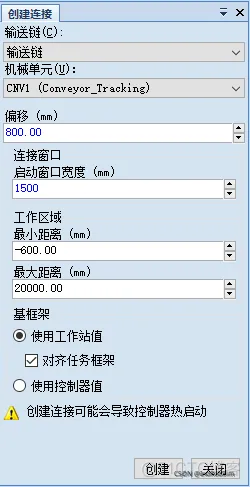
偏移:设置输送带机械装置(模型)基准坐标系位置与输送带跟踪基准坐标系位置(连接窗口)的偏移值,机器人将在工件运行到输送带基准坐标系位置处时开始执行跟踪任务。
启动窗口宽度:设置以输送带跟踪基准坐标系为起始位置沿着输送带输送方向的偏移值,这个偏移距离所在位置与输送带跟踪基准坐标系所在位置将形成一个区域(跟踪窗口),机器人将在这个区域内完成输送带跟踪任务。
工作区域:设置在跟踪窗口中机器人能够顺利完成工件加工的工作区域,通过设置“最小距离”与“最大距离”来控制区域范围大小。
基框架:设置输送带跟踪基准坐标系坐标值更新方式,包含“使用工作站值”与“使用控制器值”两种方式,在选择“使用工作站值”时,可以选择“对齐任务框架”,以使RAPID中的任务坐标系与连接的工作站中的基准坐标系对齐。
根据需要设置连接参数,设置完成后点击“创建”按钮。
创建机器人控制器与输送带跟踪连接时会对机器人控制器进行热启动,启动完成后设置的输送带跟踪参数才会生效。这时,在软件工作区的输送带上会出现一个淡黄色的长方体,这个长方体就是机器人输送带的跟踪窗口。
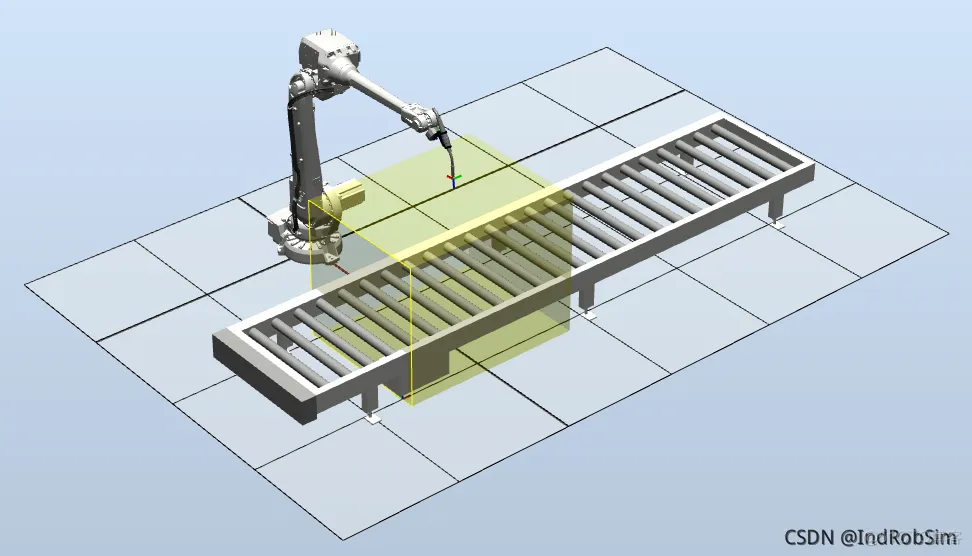
同时,在机器人控制系统中自动创建了一个用于输送带跟踪的工件坐标系,即wobj_cnv1。

在进行机器人示教编程之前,先要把工件放置到输送带上,并将工件移动到跟踪窗口区域内。
软件“基本”菜单栏中,左侧“输送链”下“对象源”内右击“Work1”,在弹出的快捷菜单中点选“放在传送带上”,此时软件工作区输送带上出现工件模型。
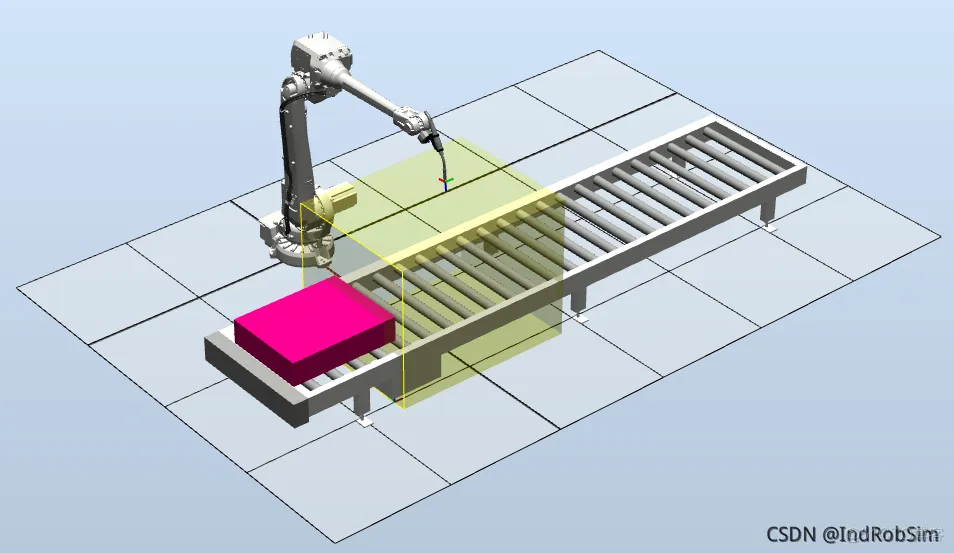
再次右击“Work1”,在弹出的快捷菜单中依次点选“连接工件”→“wobj_cnv1”,建立工件与机器人之间的连接关系。
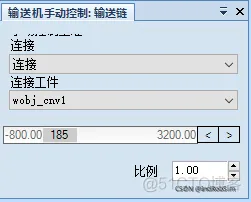
右击“输送链”,然后选择“操纵”,在弹出的输送链手动控制对话框中手动运行输送带,使得工件运行到跟踪窗口内的工作区域中。
对机器人进行示教编程,控制机器人能够围绕长方体工件上表面边缘运行一周。这里要注意的是,机器人在跟踪窗口中运动只能使用直线类型的运动指令,如MoveL,并且要使用工件坐标系wobj_cnv1;机器人Home点程序可以使用任意的运动指令进行示教,工件坐标系要使用非wobj_cnv1,本例程使用机器人默认工件坐标系wobj0。
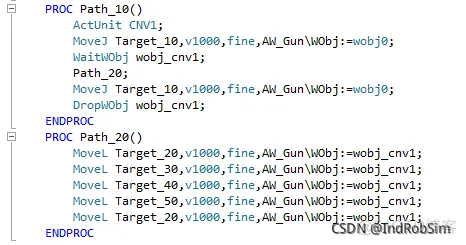
在“仿真设定”窗口中设置机器人仿真运行模式为“连续”,机器人进入点设置为“Path_10”,然后点击“播放”命令按钮,就可以仿真运行了,仿真运行效果如下方动态图所示。
若是需要停止机器人仿真运行,可以点击“停止”命令按钮,然后再点击“重置”命令按钮,将机器人、输送带以及工件恢复初始状态。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















