















































软件

产品


概述
变位机是机器人弧焊焊接中经常使用的外围设备,在机器人弧焊焊接虚拟仿真中变位机的仿真同样重要。
DELMIA软件能够自动生成机器人弧焊焊接程序,那么带变位机的机器人弧焊焊接程序是否能够自动生成呢?答案是肯定的。本期,就来介绍一下带变位机的机器人弧焊焊接程序的自动生成方法。
机器人弧焊焊接工作站创建以及前期准备工作
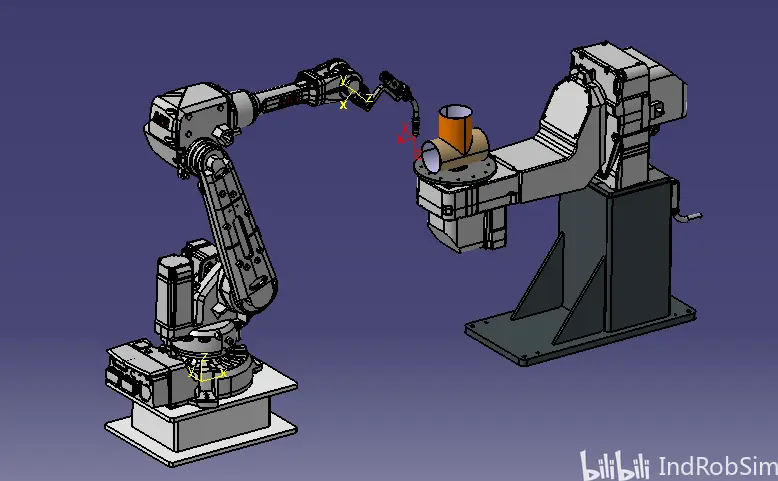
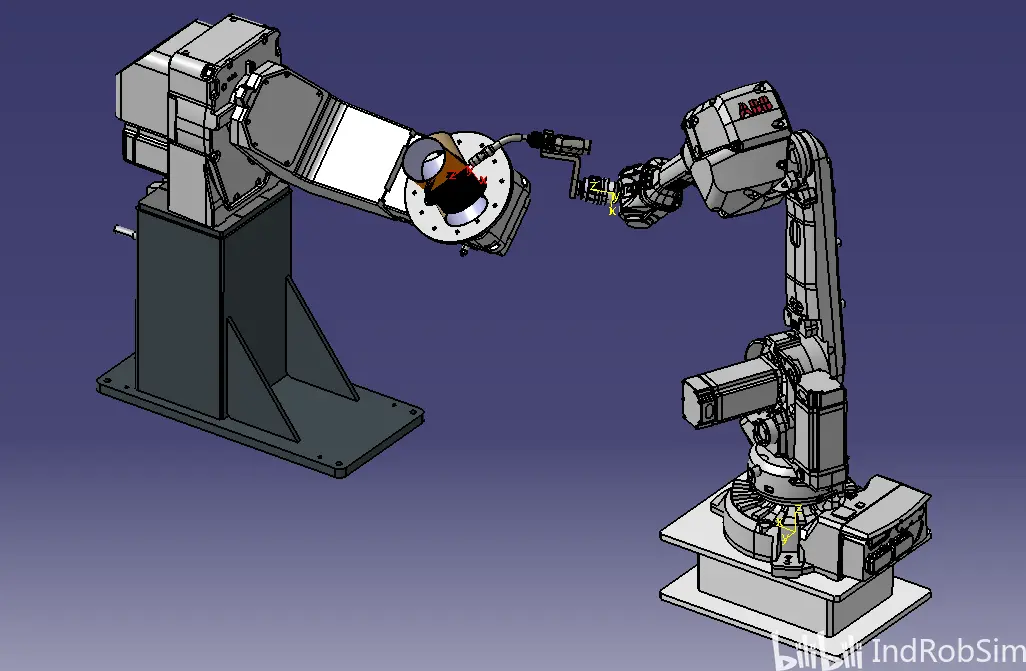
在DELMIA软件的“Device Task Definition”模块中分别导入机器人模型、机器人底座模型、弧焊焊枪模型、变位机模型、工件模型,并安装布局到合适位置,其中弧焊焊枪模型要事先定义为机器人工具,变位机模型要事先制作好运动机构。
工件模型放置到变位机上以后,要使用软件的“附加”命令将其附加到变位机的末端旋转轴上,以便于变位机做旋转运动时工件能够同步跟随运动。变位机模型运动机构的制作方法已通过名为《DELMIA软件:机器人L型双轴变位机模型运动机构制作方法》的文章发布,可参考制作。
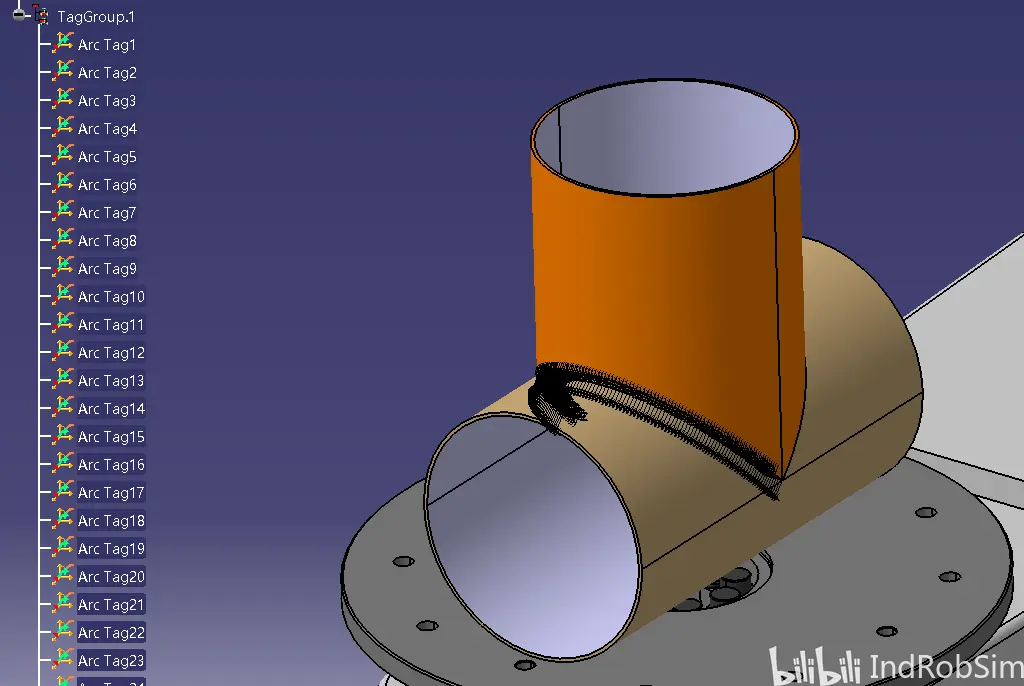
切换到“Arc Welding”模块中,即弧焊焊接模块,使用合适的弧焊焊接焊点坐标生成命令在工件要焊接的焊缝上自动生成机器人弧焊焊接示教点坐标。本例中使用的命令为“Tag on Intersecting Surfaces”,当然也可以使用其他命令来自动生成。
由于要焊接的焊缝为空间圆弧曲线,因此在设置焊点坐标生成参数时,要做适当调整,以生成更多的焊点坐标,这样机器人焊接时其运动轨迹才会更加精确。
焊点坐标生成完成后,切换回“Device Task Definition”模块,使用“Add Tag”命令将焊点坐标自动转换成机器人弧焊焊接程序。
变位机定义以及与机器人外部轴关联
变位机只有作为机器人的外部轴才能实现与机器人的插补联动,在虚拟仿真中也是如此。
在制作变位机模型运动机构时,我们并没有对变位机进行外部轴定义,是因为外部轴是相对于某一台机器人而言的,必须和机器人同时使用时才能进行定义。
在“Device Task Definition”模块内,点击下方Robot Controller工具条中的“Define Auxiliary devices”命令按钮,弹出Define Auxiliary devices对话框。
分别点选机器人与变位机,并在Available type后选择外部轴的类型为“Workpiece Positioner”,即工件变位机,然后点击“确定”按钮,机器人的变位机外部轴定义完成。

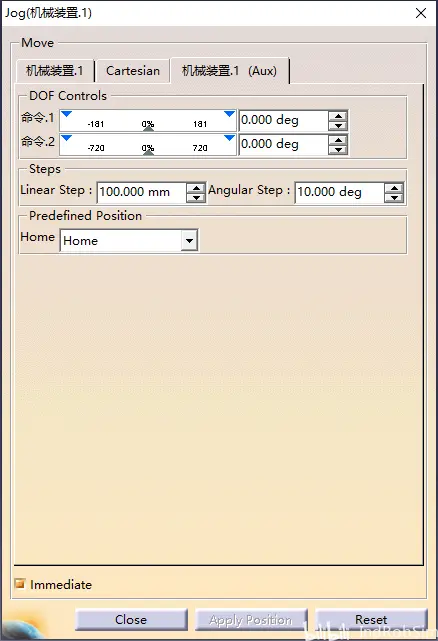
此时,再次打开机器人手动操作面板,可以看到在面板上方多了一个“机械装置.1(Aux)”选项卡,在其中可以手动操作变位机的各个运动轴,这就表示机器人的变位机外部轴已经定义成功。
变位机与机器人协调运动程序自动生成
DELMIA软件不仅能够自动生成机器人弧焊焊接运动路径轨迹程序,还能够自动生成变位机运动程序,并将变位机各个轴的运动数据保存到机器人外部轴示教点位中。
再次切换到“Arc Welding”模块,在Auxiliary Axes Program工具条中点击“Robot Positioner Programming”命令按钮,然后在左侧的PPR浏览树中点击机器人任务程序,弹出Positioner Programming对话框。
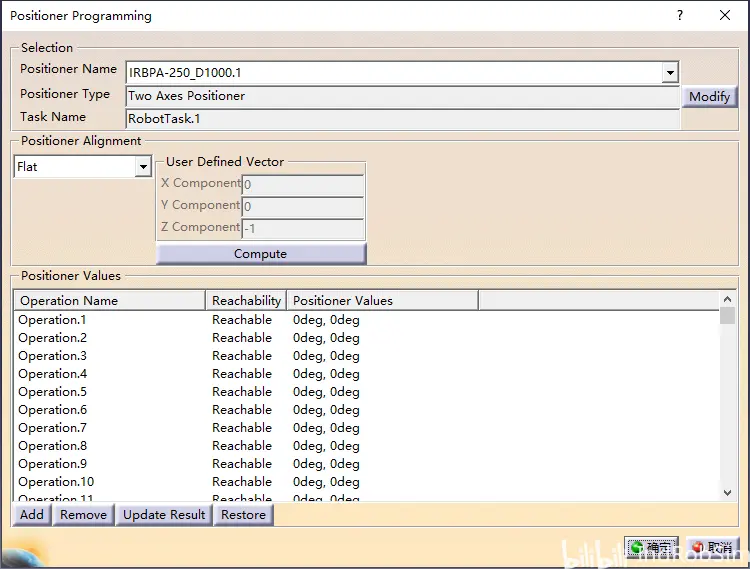
在对话框中的Positioner Alignment选项下选择相关参数后,点击“Compute”按钮就能够自动生成变位机各个轴的旋转角度数据,以使机器人运动时TCP能够与世界坐标系对齐。
其中能够选择的选项包括:
Flat:表示机器人进给运动方向为向下,对应的User Defined Vector值为(0,0,1)。
Horizontal:表示机器人进给运动方向为向前,对应的User Defined Vector值为(1,0,0)。
Vertical:表示机器人进给运动方向为侧面,对应的User Defined Vector值为(0,1,0)。
User Defined:表示机器人进给运动方向需要用户自定义,此时User Defined Vector下的输入框变为激活状态,可根据实际工艺需求设置相应的数值,支持设置的数值包括-1、0和1。
本例中,Positioner Alignment选项下选择“User Defined”,User Defined Vector下设置的数值为(1,1,-1),点击“Compute”按钮,在Positioner Values功能区下的Positioner Values栏下自动生成变位机各个轴的旋转角度。
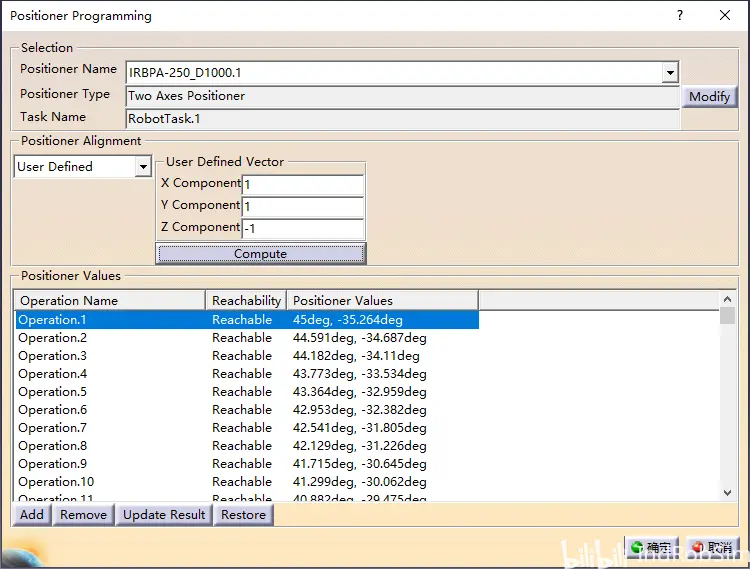
同时,软件工作区中变位机旋转到对应点位,机器人也运动到焊接起始点位置处。Positioner Values功能区下通过依次点选机器人示教点操作,机器人与变位机会同步运动到相应的点位处。
Reachability栏下会显示每一个操作点位的可达性,“Reachable”表示机器人在变位机当前运动姿态时操作点位可达,“Not Reachable”表示不可达。
依次检查每一个操作点,保证其可达性均为Reachable,同时机器人的姿态也比较舒服,不怪异,然后点击“确定”按钮。
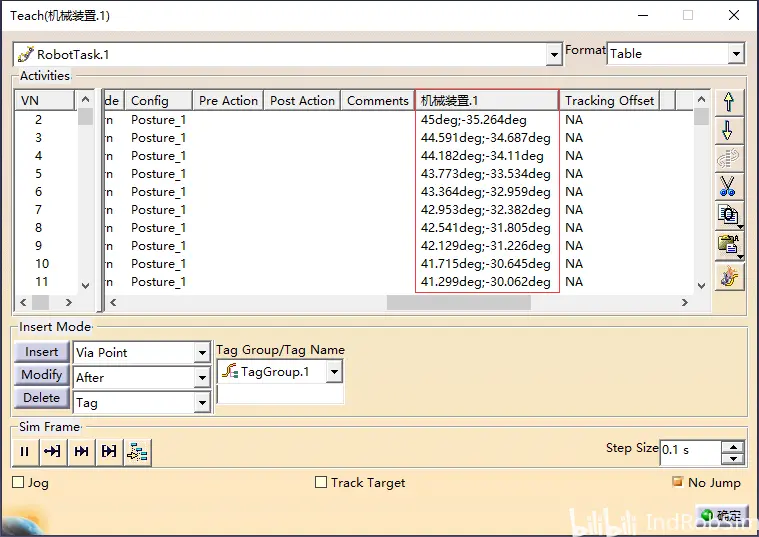
再次返回“Device Task Definition”模块,打开虚拟示教器,在其外部轴数据显示栏“机械装置.1”下可以看到每一个操作程序中均保存了自动生成的变位机旋转角度值。
机器人弧焊焊接仿真运行
程序编写完成后,对机器人仿真运行,如下方动态图所示,可以看到机器人与变位机按照自动生成的程序实现了对工件指定焊缝的联动插补焊接。

The End

武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















