















































软件

产品


概述
弧焊焊接是工业机器人应用最为广泛的一个领域,与点焊焊接的离散加工路径轨迹不同,弧焊焊接是一种连续路径轨迹加工工艺,机器人在弧焊焊接过程中从起点至终点必须连续运行。从理论的角度看,这种连续的运行轨迹可以看作由无限多个点组成;而从机器人工艺应用的实际看,我们就可以对这种加工路径轨迹为机器人示教尽可能多的点,示教的点越多,机器人的运行轨迹就会越接近连续。
针对这种加工特点,DELMIA软件特地开发了机器人弧焊焊接工艺应用模块。模块中内置了多个机器人弧焊焊点坐标自动生成的命令,比如基于相交表面、基于相交零部件、基于曲线等特征自动生成弧焊焊点坐标。用户可以使用这些命令,通过在导入的CAD模型上选择路径轨迹参考特征直接生成机器人弧焊焊点坐标。本期,先来介绍一下基于相交表面特征自动生成机器人弧焊焊点坐标的操作方法。
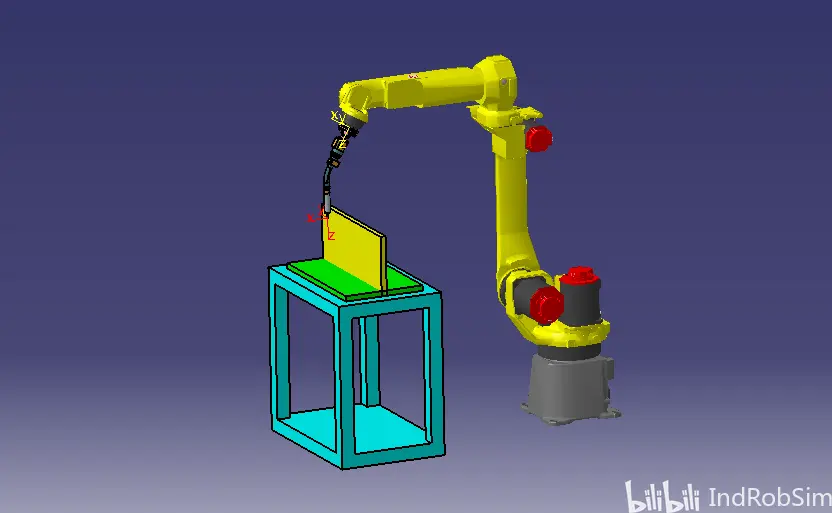
机器人弧焊工作站创建
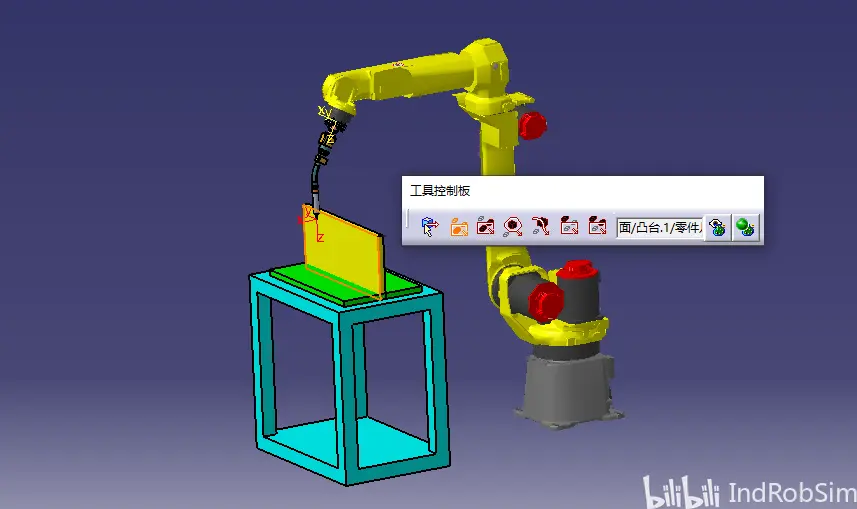
在DELMIA软件的“Device Task Definition”模块中创建一个简易的机器人弧焊焊接工作站,工作站包含1台机器人、1个焊接工作台、1把弧焊焊枪和1个焊接工件。其中,焊接工件是由两个独立的长方体零件装配而成。
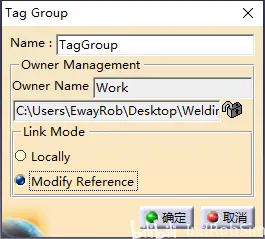
添加弧焊焊点坐标组
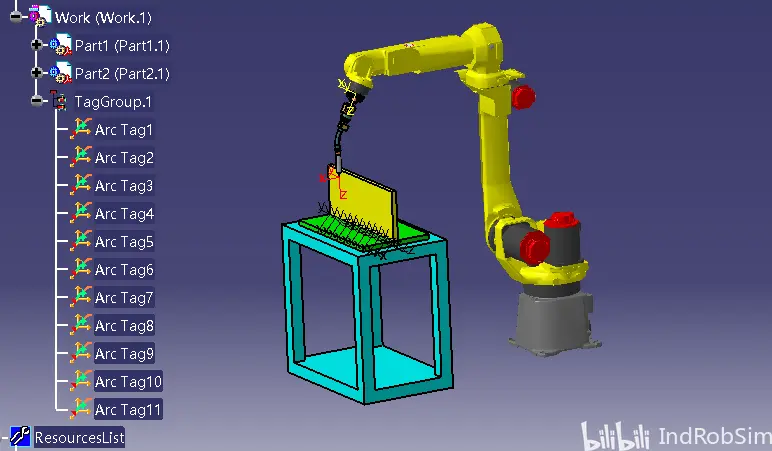
在“Device Task Definition”模块中使用“New Tag Group”命令,在焊接工件下创建一个焊点坐标组,默认情况下坐标组被自动命名为“TagGroup.1”。
自动生成弧焊焊点坐标
基于相交表面特征生成弧焊焊点坐标功能可以根据工件上两个或多个相交的表面之间形成的曲线自动生成机器人弧焊焊接路径点坐标,而焊枪的接近角就是两相交表面之间的等分角。
将DELMIA软件切换到“Arc Welding”模块,在Tag工具条中点击“Tag On Intersecting Surfaces”命令按钮,弹出Surface/Surface Intersection对话框。
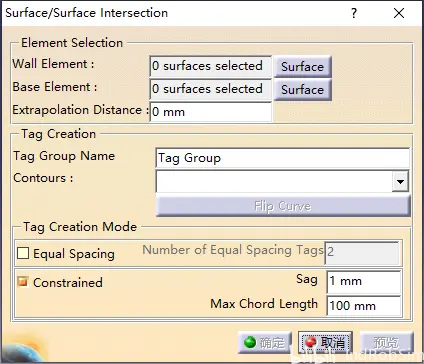
Wall Element:设置用于生成机器人弧焊焊接路径坐标的非基础参考平面,即焊枪TCP坐标系Z轴所在的平面。
Base Element:设置用于生成机器人弧焊焊接路径坐标的基础参考平面,即焊枪TCP坐标系X轴所在的平面。
Extrapolation Distance:设置焊枪外推距离,一般保持默认。
Tag Group Name:设置用于存放弧焊焊点坐标的坐标组名称,如果没有设定名称的坐标组,那么软件会自动以此名称创建新的坐标组。当然,也可以在左侧PPR浏览树中选择已有坐标组。
Contours:显示已生成的焊缝轨迹曲线名称,有多条轨迹曲线时,可以通过点击此条目后的下拉菜单来切换要显示的焊缝轨迹曲线。
Flip Curve:点击此按钮可以调换焊缝轨迹曲线的起点与终点,即机器人焊接的起点变为终点,终点变为起点,进而改变机器人焊接方向。
Equal Spacing:选中后,焊点坐标以等间距模式生成,即在焊接轨迹起点与终点之间按照“Number of Equal Spacing Tags”选项后设置的坐标数量,等间隔生成焊点坐标。
Constrained:选中后,焊接轨迹起点与终点之间的焊点坐标以约束模式生成,约束条件为曲线的凹陷度(Sag)与最大弦长(Max Chord Length),二者共同决定了焊点坐标的密集程度。
点击Wall Element后的“Surface”按钮,然后在软件工作区的工件模型上选择用于生成焊点坐标的第一个参考平面,此时在弹出的工具控制板中显示已选中的参考平面名称,点击“完成”按钮。
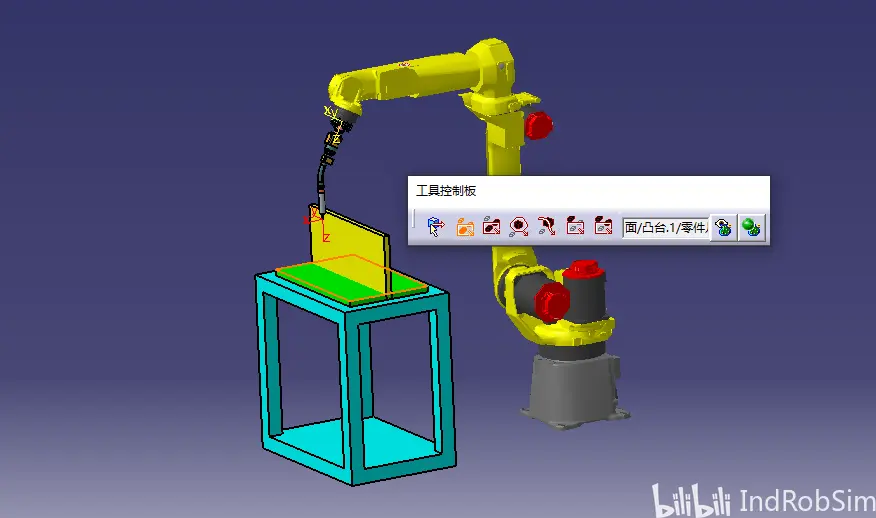
同样的方法,在Base Element后为要生成的焊点坐标选择第二个参考平面,也就是基准参考平面。选择完成后,工件模型上会出现焊接轨迹的起点和终点标记,标记以带有“Start”与“Stop”字样的绿色箭头形式显示,箭头指向就是机器人焊接方向。
点击Tag Group Name后的输入框,然后在PPR浏览树中选择新创建的焊点坐标组“TagGroup.1”,选中后坐标组名称将显示在输入框中。
在Tag Creation Mode功能区下选择焊点坐标生成模式,本例中选择“Constrained”模式,同时设置Sag、Max Chord Length的参数。
全部设置完成后,点击“预览”按钮,软件工作区工件模型上焊接轨迹起点与终点之间出现绿色的焊点坐标标记,如下图所示。

确认无误后,点击“确定”按钮,焊接轨迹上所有的焊点坐标标记变为焊点坐标系,同时在焊点坐标组下出现生成的焊点坐标文件。
焊点坐标自动转换为机器人程序
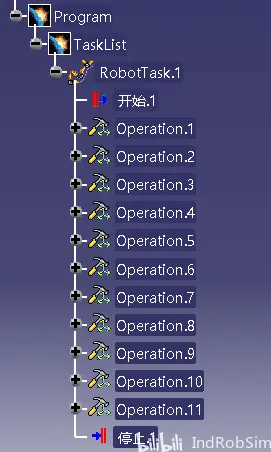
切换回“Device Task Definition”模块,使用Sequence工具条中的“New Task”命令创建机器人任务,默认情况下机器人任务名称为“RobotTask.1”。
点击“Add Tag”命令按钮,然后先选择创建的机器人任务“RobotTask.1”,再选择焊点坐标组“TagGroup.1”。这时,在机器人任务下以焊点坐标为参考自动生成机器人焊接程序。
焊接机器人仿真运行
对机器人仿真运行,其运行效果如下方动态图所示,可以看到软件在指定的两个参考平面间自动生成了焊接轨迹程序,并且机器人能够在焊缝处仿真运行。

The End

武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















