















































软件

产品


Delmia软件中机构定义主要用到的模块为Device Building装置创建模块。在进行项目仿真之前,需要进行运动机构的定义,比如弧焊焊枪、点焊焊钳(C枪和X枪)、外部轴、夹具打开关闭动作以及机器人机构等等,都是需要提前定义好,才能加载到仿真里面使用。尽管Delmia有自己的机器人库,但是并不是所有的机器人型号都有,所以有时机器人机构也是需要通过手动创建定义来完成。下面我们以安川6轴机器人MA1440为例进行详细的操作步骤讲解:
1、数据整理:如果我们拿到的机器人数据没有按照各关节进行分类,则需要我们先进行处理,将机器人各关节分别另存为cgr格式文件,然后新建装配体文件,导入cgr格式的各关节文件,保存为新的机器人装配体文件,类似X枪和C枪的处理过程。
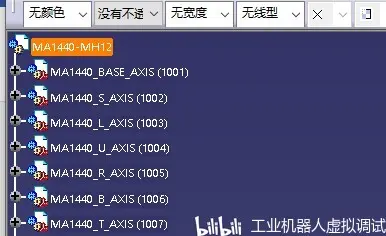
若我们拿到的数据已经是整理好的,则无需上述操作,如下图所示每个关节单独一个文件(原档为stp格式),我们直接将其保存为catia装配体文件。
2、若机器人数据经过另存cgr处理这一步,则在定义机构的之前,就必须要在各关节旋转中心创建设计坐标系,这主要是因为经过另存cgr这一步之后,模型数据已经不是实体状态,无法直接选择模型本身的旋转中心线,只能通过创建设计坐标系来作为辅助旋转轴线(坐标系z向),具体操作类似X枪的机构定义过程。
本例中机器人数据直接是stp格式进行保存,则无需创建设计坐标。用Delmia软件打开机器人装配体文件,切换到Device Building模块,在左侧模型树中选择机器人装配体,然后点击鼠标右键,选择展示选项下面的设计模式,将机器人模型切换到设计模式,以便于选取各关节旋转中心轴线,否则无法选取;

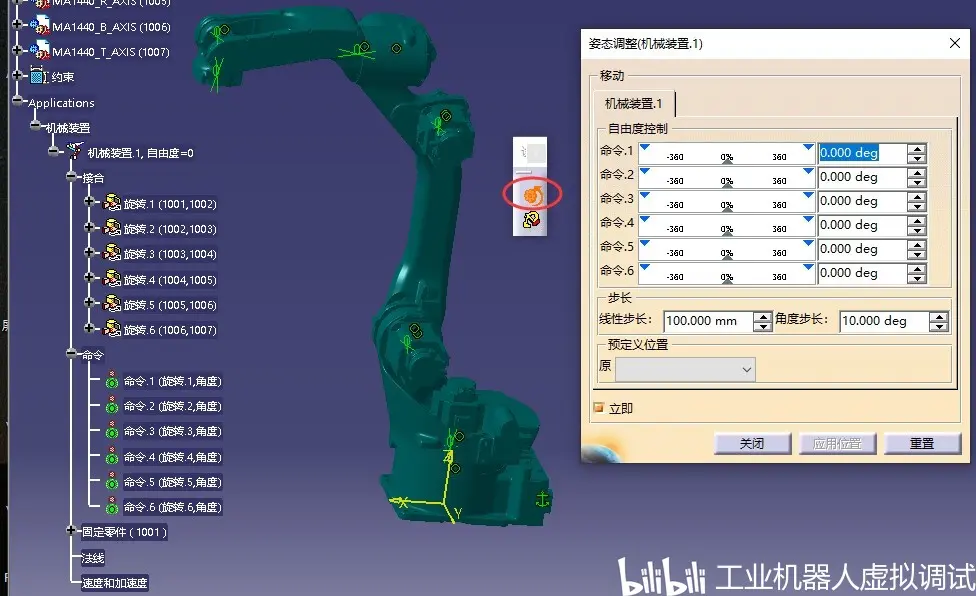
3、机构定义:新建机械装置,选择MA1440-BASE为固定零件,机械装置创建完成后移动S轴使其和BASE之间有一定的距离,这样方便选取两者的接触面。在Device Building工具条中选择旋转接合命令,分别选取BASE和S轴的中心轴线和接触平面,如下图所示选中驱动角度、零偏移, 点击确定后S轴自动回到初始位置,并弹出可以模拟机械装置对话框,点击确定将其关闭;

4、重复上述步骤,依次完成剩余5个关节运动机构的定义,需要注意的是要依次创建各关节运动机构,不能打乱顺序随便创建。完成后打开机械装置操作面板对话框,查看各关节运动是否正确;
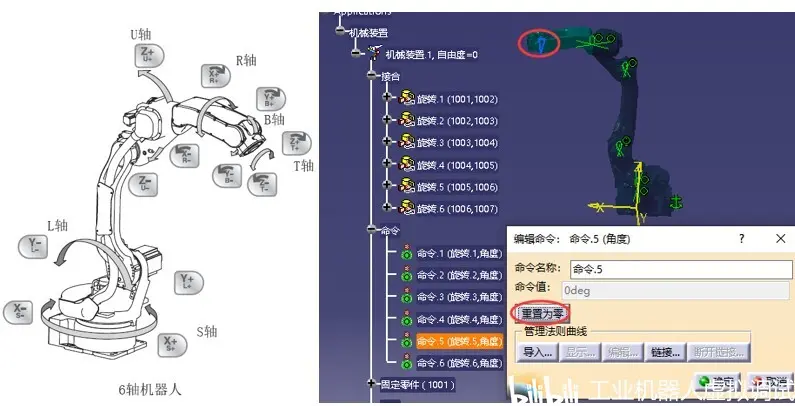
5、关节运动方向及零位调整:参考机器人手册查看关节转动方向是否正确,若需要修改方向,则在机械装置下面的命令列表里直接双击需要改变方向的命令,弹出编辑命令对话框,并且视图中出现一个蓝色箭头,鼠标左键单击此箭头可改变关节转动正负方向。编辑命令对话框中,有一个重置为零的按钮,可以将关节当前位置重置为零位;
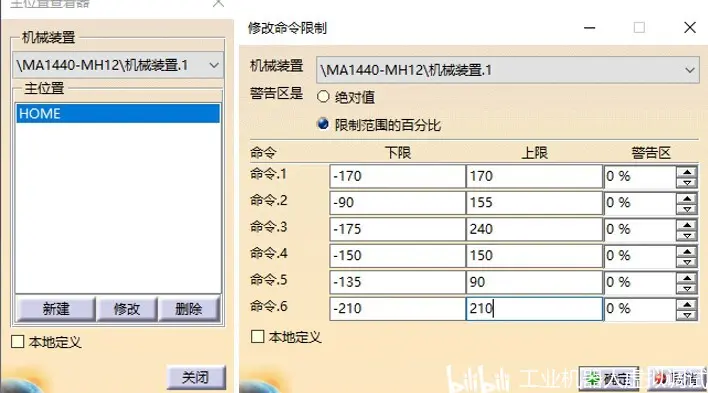
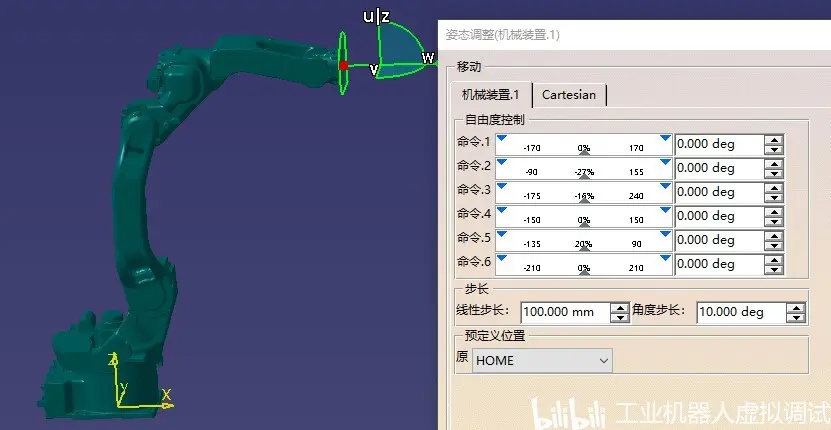
6、设置极限位置:新建机器人HOME位置,然后按下图所示设置机器人各关节的极限值,完成后点击确定;
7、创建坐标系:创建机器人BASE坐标和TOOL坐标,注意坐标系的方向要调整到正确方向,避免安装时产生不必要的麻烦,如下图所示;

8、创建机器人IK:在工具栏中选择创建机器人IK命令图中1,弹出如下图所示的对话框,安装零件和安装偏移分别选择机器人T轴(1007)和工具坐标,参考零件和基本零件选择MA1440-BASE零件(1001),然后求解类型选择常规反转,运动类别选择联接的【RRR:RRR】(表示6个旋转运动);
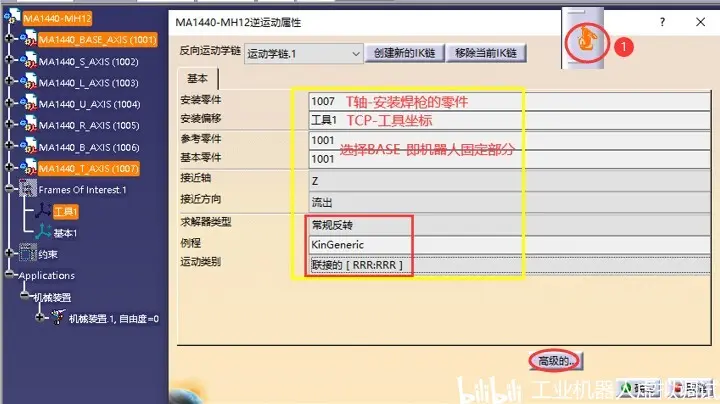
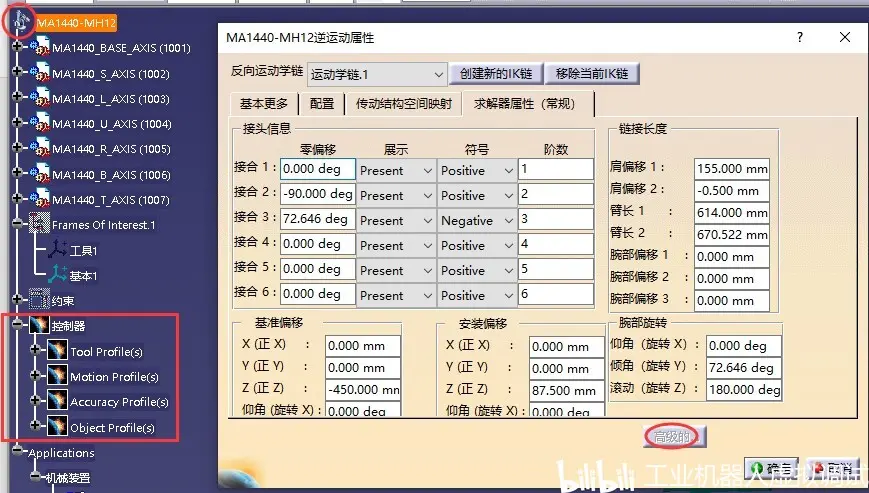
9、完成以上设置后,点击高级的按钮后会多出一些选项,如见下图所示,点击确定完成IK创建,同时左侧模型树中机器人装配体的图标也变为机器人形状,并增加机器人控制器一列;
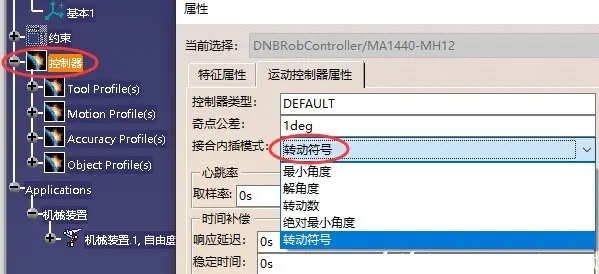
10、选择控制器点击鼠标右键,打开属性对话框,在运动控制器属性界面下,接合内插模式选择转动符号,确定;
11、打开机器人操作面板对话框,可以看到此时罗盘自动捕捉到机器人TCP位置,可以直接拖动罗盘操作机器人,也可以单轴运动;
以上就是6轴机器人运动机构定义以及机器人IK的创建过程。
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















