















































软件

产品


在MotoSimEG-VRC仿真软件中,焊接程序一般都是直接示教,不用CAM功能去生成机器人焊接路径,这里只是介绍一种创建机器人焊接程序方法,具体操作如下:
1、新建弧焊机器人系统,如图本例中选用AR1440机器人;

2、导入机器人底座、产品以及周边设备,需要注意的是使用CAM功能创建焊接轨迹的工件,其文件格式是STP或者SAT,并在下图中红圈所示处打勾,否则后续会无法选择产品的边线以创建焊接轨迹;

3、打开CAM对话框,输入程序名称,点击新增,进入下一个对话框Pick Edg打勾,选择产品边线;

4、点击创建路径,弹出Path Setting对话框,设置轨迹参数后OK,完成路径创建;


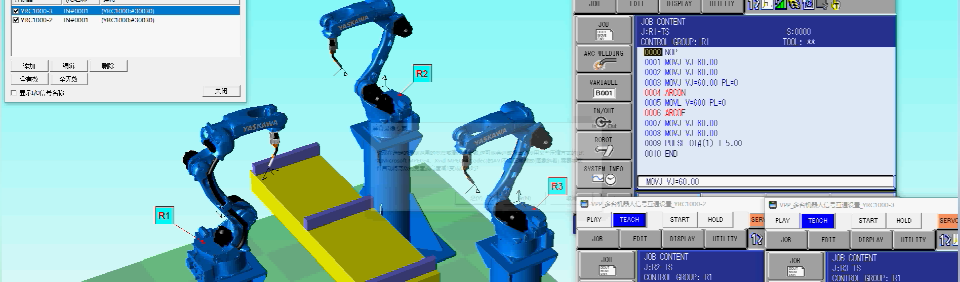
5、如图机器人Robot前面打勾,点击Attain,机器人将沿着刚创建的路径运行一次;

6、点击DOWN,然后点击Register记录所有机器人点位,最后点击Create JOB,弹出程序创建成功的对话框;

7、以上是用CAM功能创建机器人程式,除此还可以通过创建坐标点来进行机器人示教;


8、除了弧焊功能可以使用CAM功能,还有以下操作也可以使用:激光焊接/切割、喷涂、研磨、轮廓加工等。
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















