















































软件

产品


本期为大家分享一篇关于球体的网格划分方法。
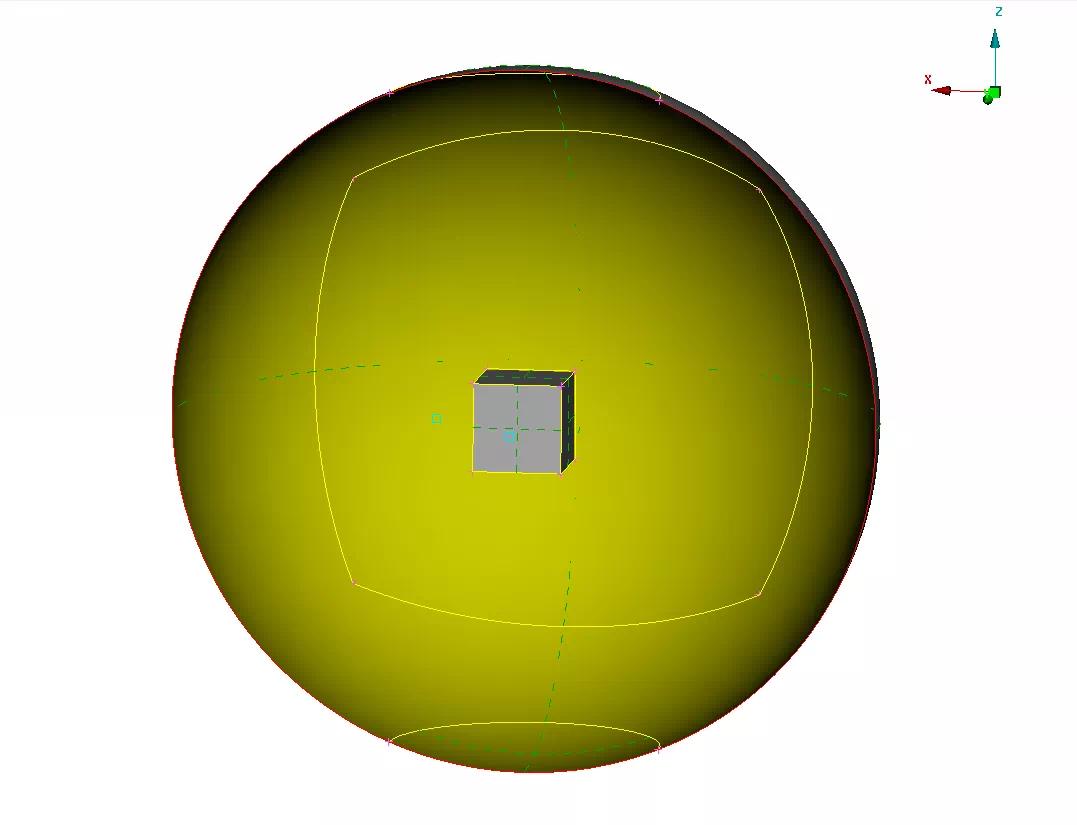
先来看下划分好的效果
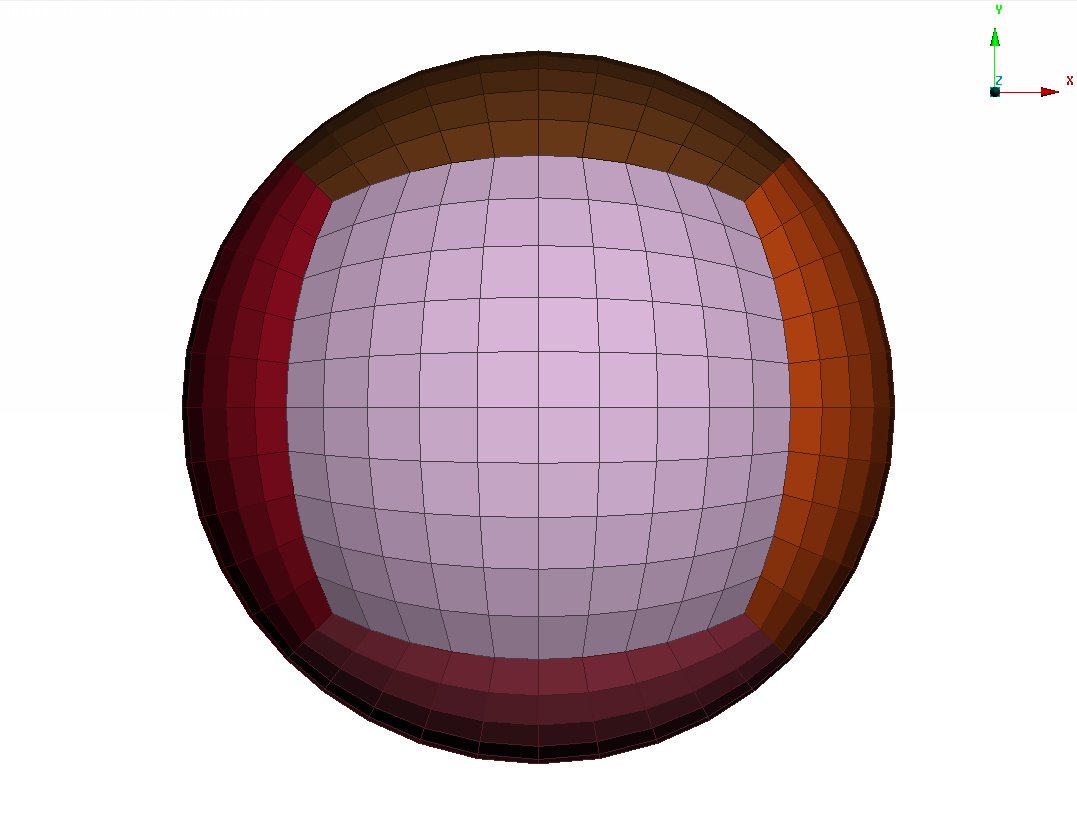
图1
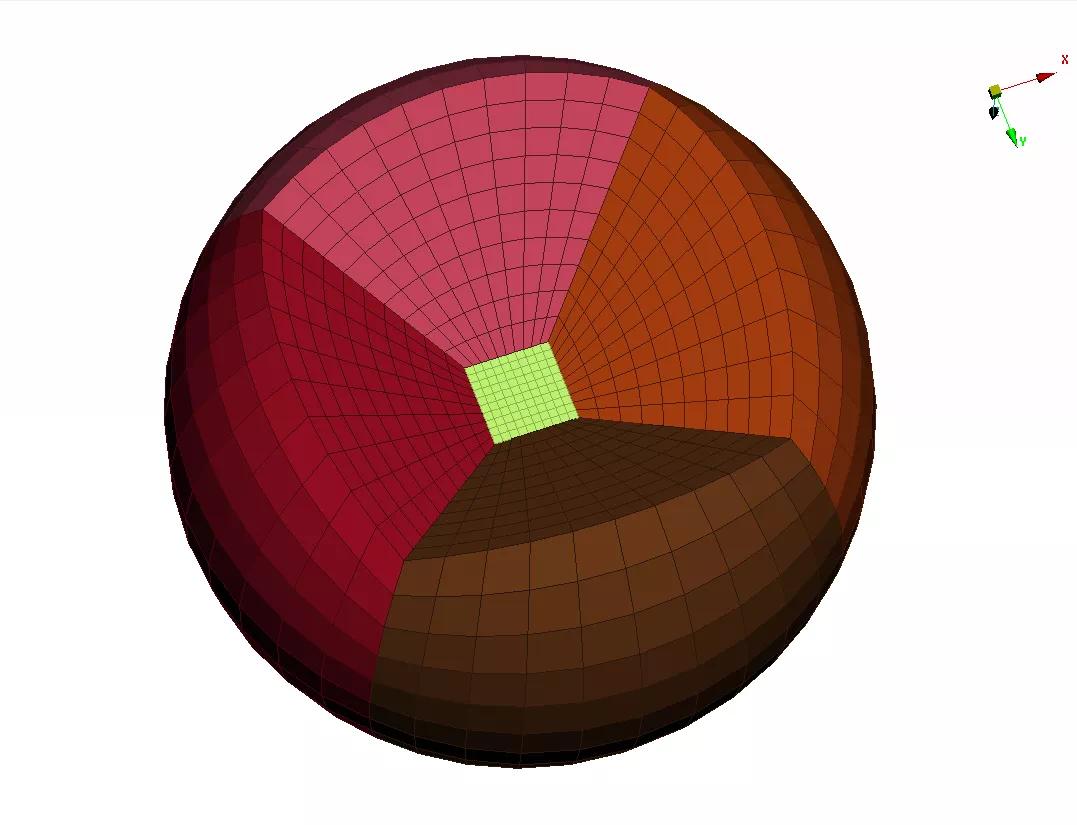
图2
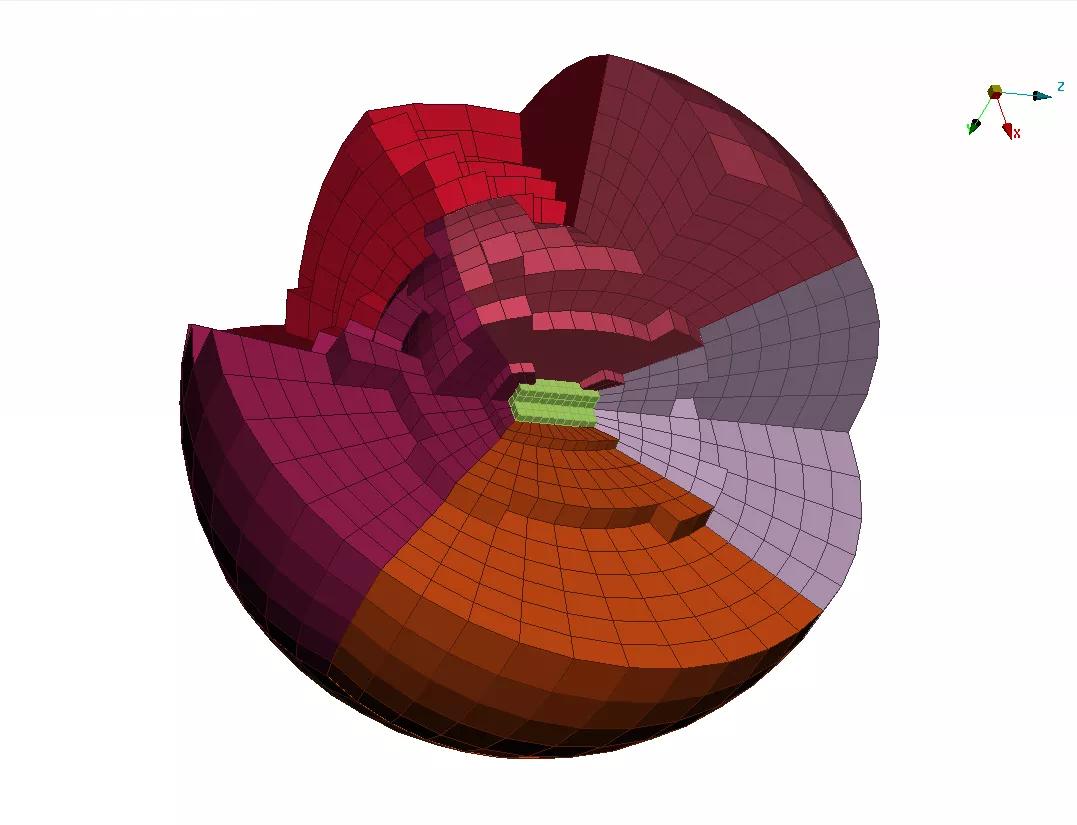
图3
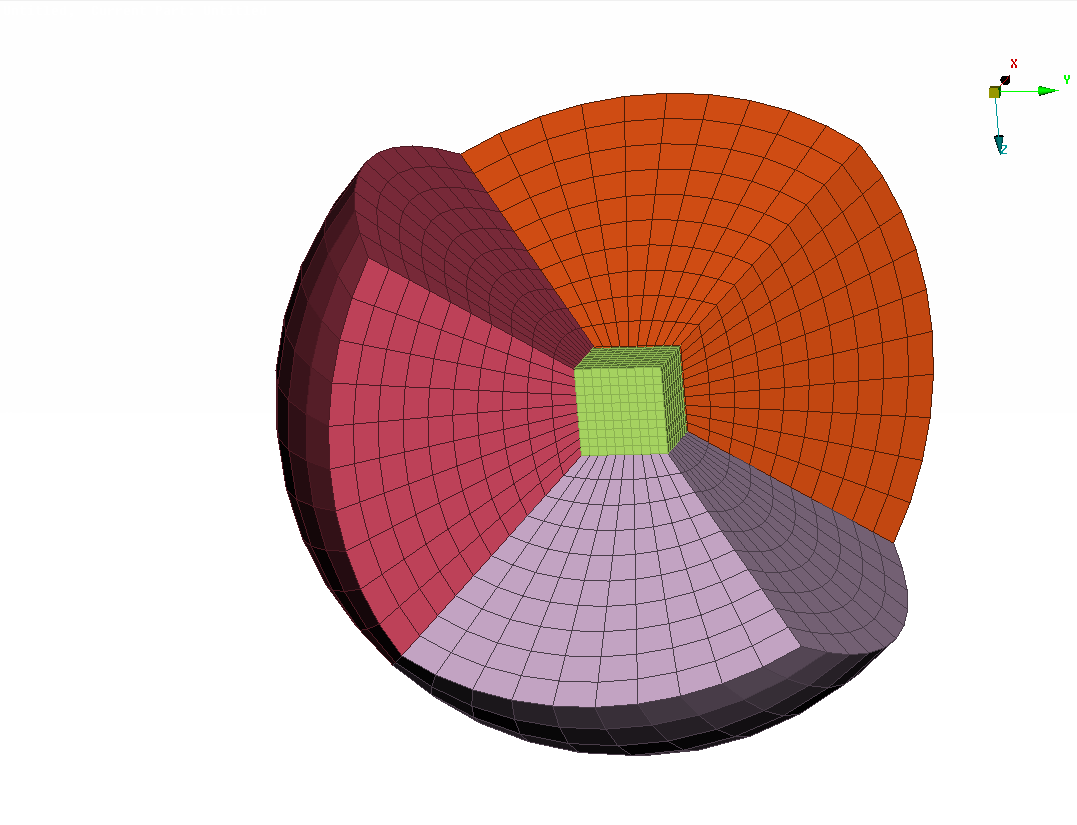
图4
然后,我们跟随以下的步骤来完成整个过程。
注:本实例仅演示原理,网格大小、几何尺寸仅供参考,大家可根据自己的尺寸按比例缩放。
1、首先画出来一个边长为10mm的正方体盒子。用到的命令是TOPO > Volume > Box.
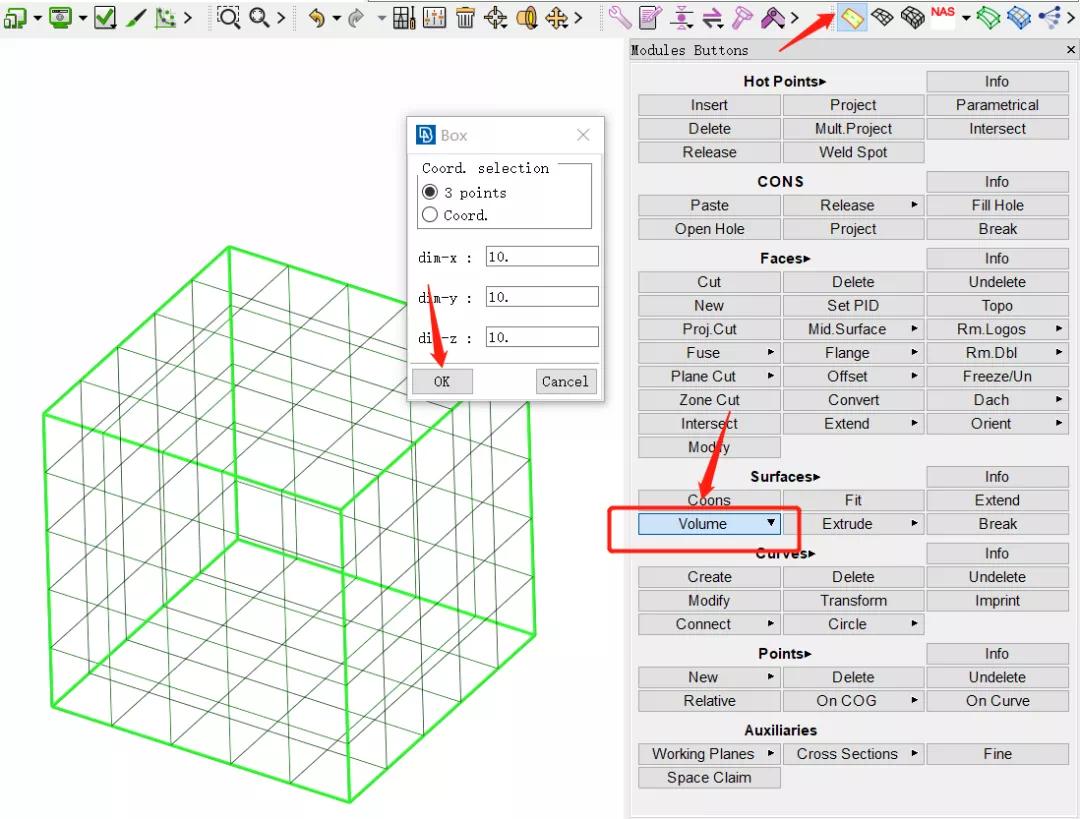
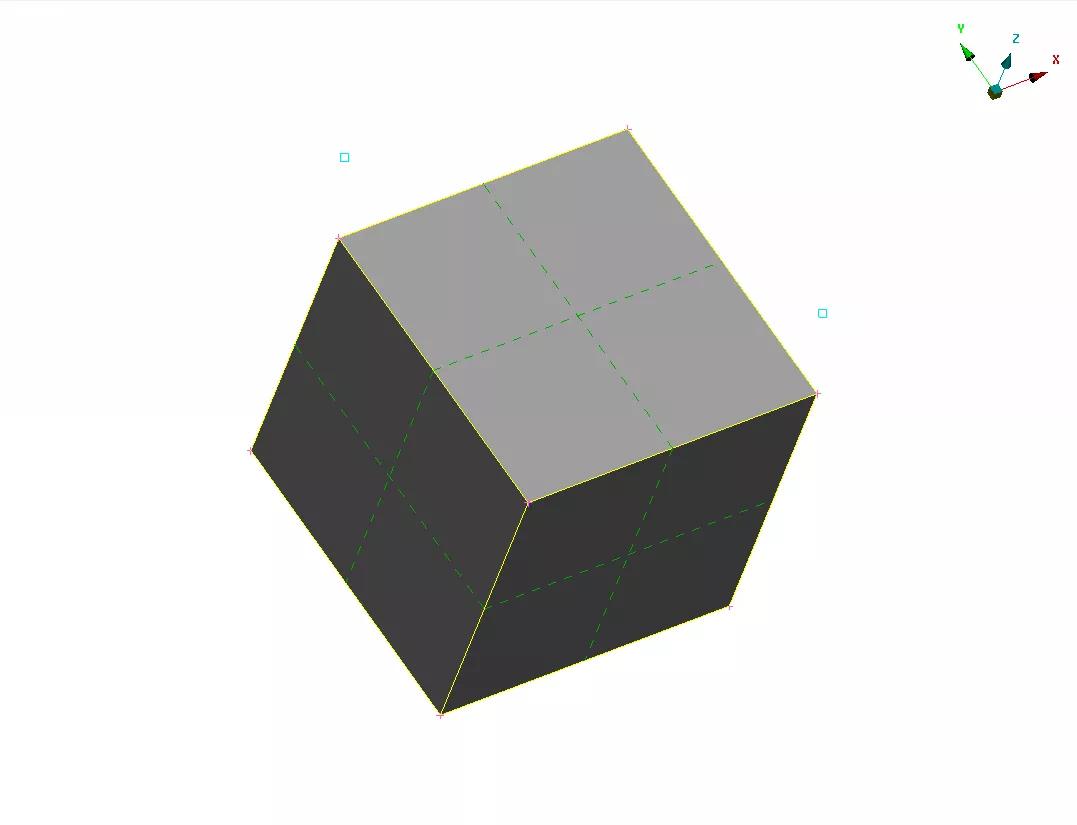
画出来的盒子如下所示。
2、然后画出来一个半径为40mm的球体。用到的命令是TOPO > Volume > Sphere.
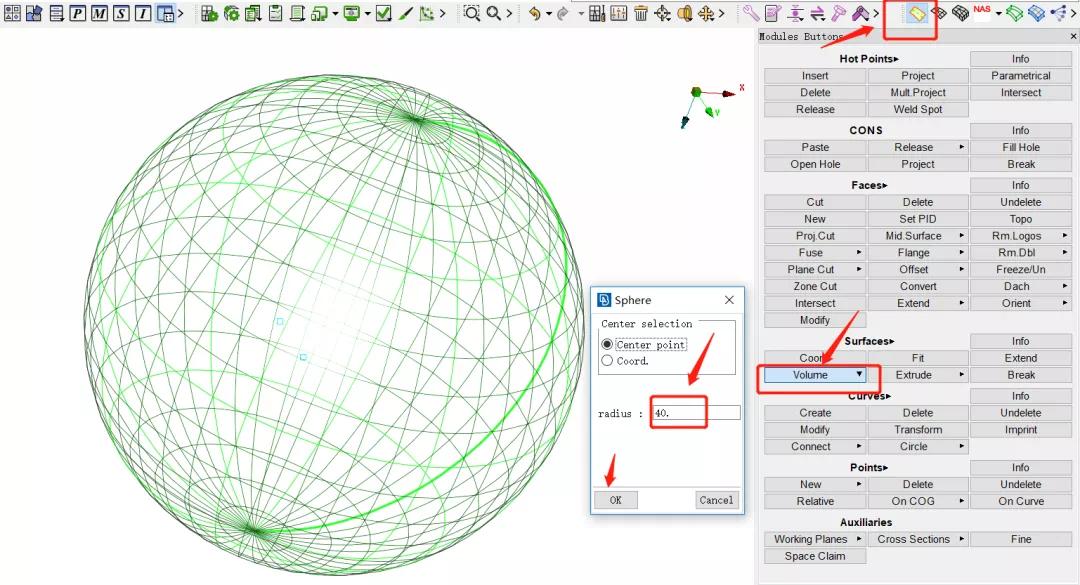
画出来的球体如下所示。
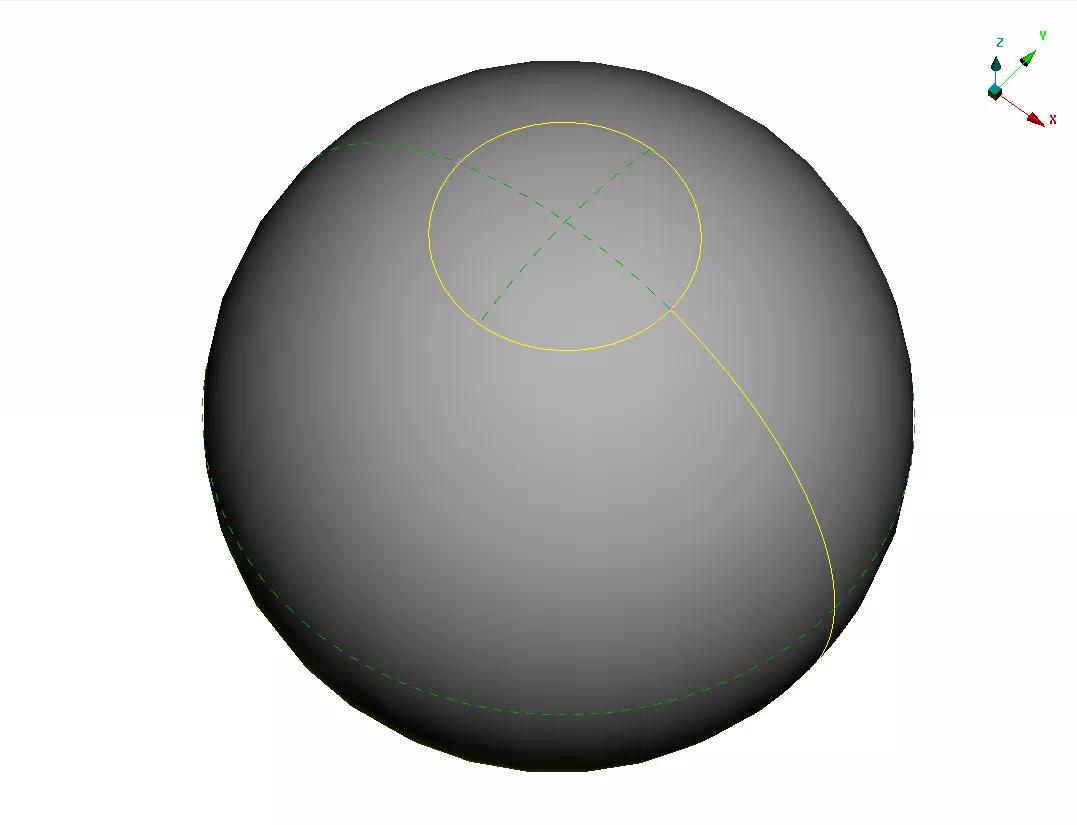
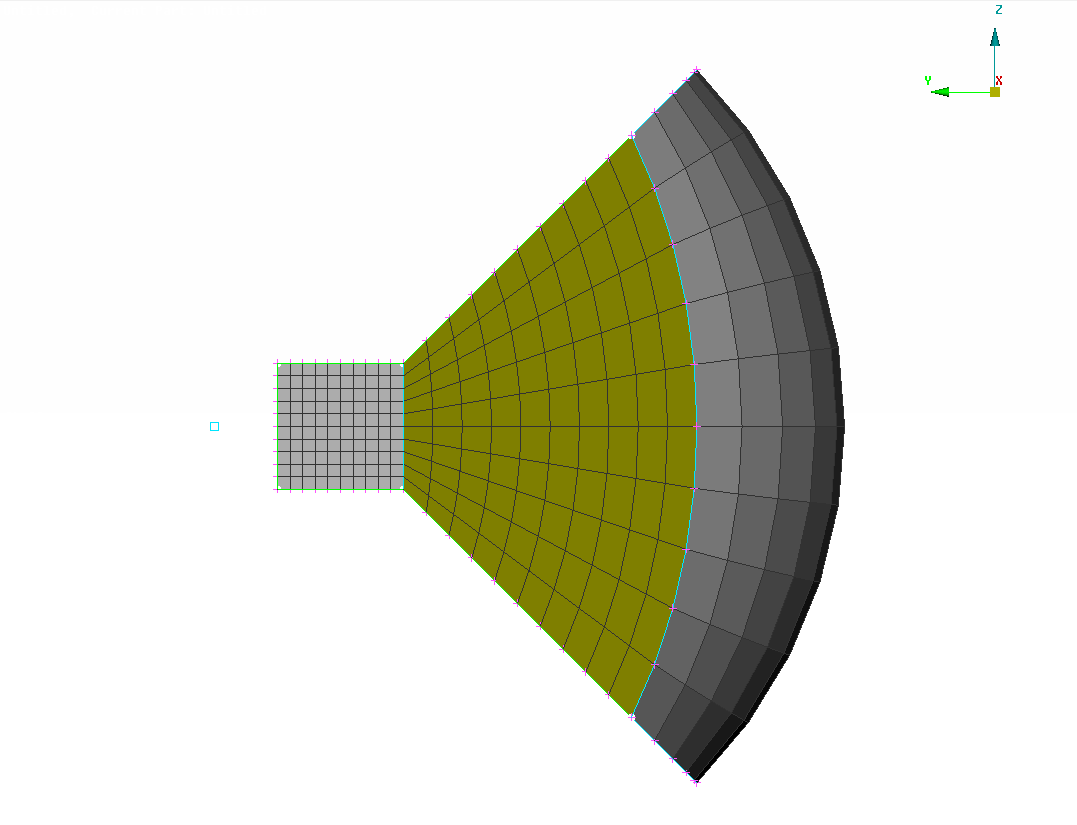
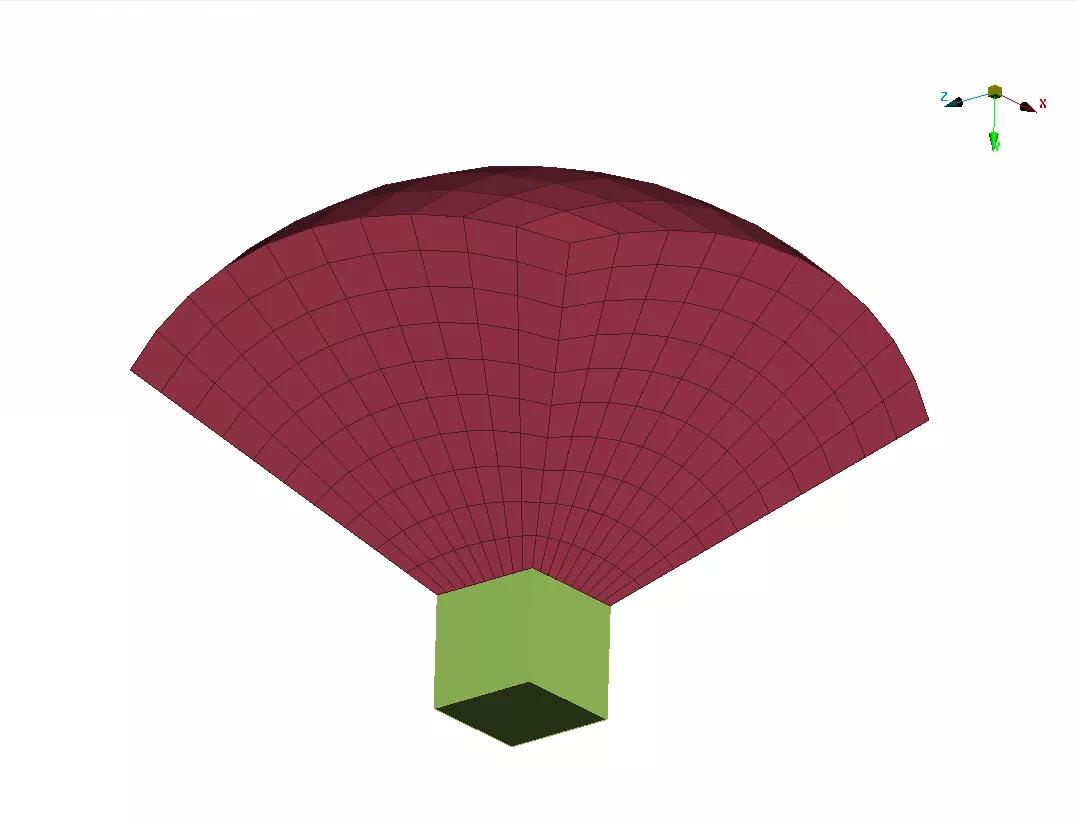
3、然后把正方体的某一面四条边投影到球体面上,效果如下图所示。
4、把正方体和球面连接起来,并进行网格划分,本例中所有边的节点数都设为了10个。所有网格都划为四边形网格。
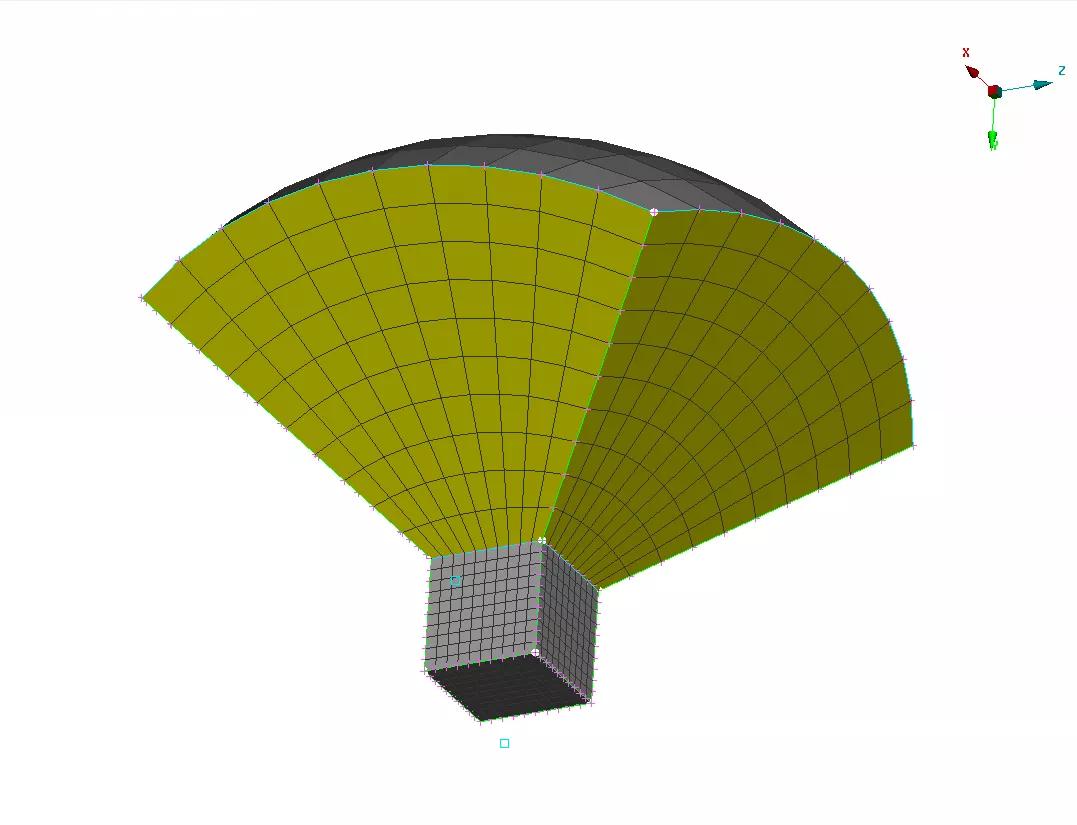
5、根据划分好的面网格直接划分体网格(命令:Volume > Structured Mesh > MAP)。
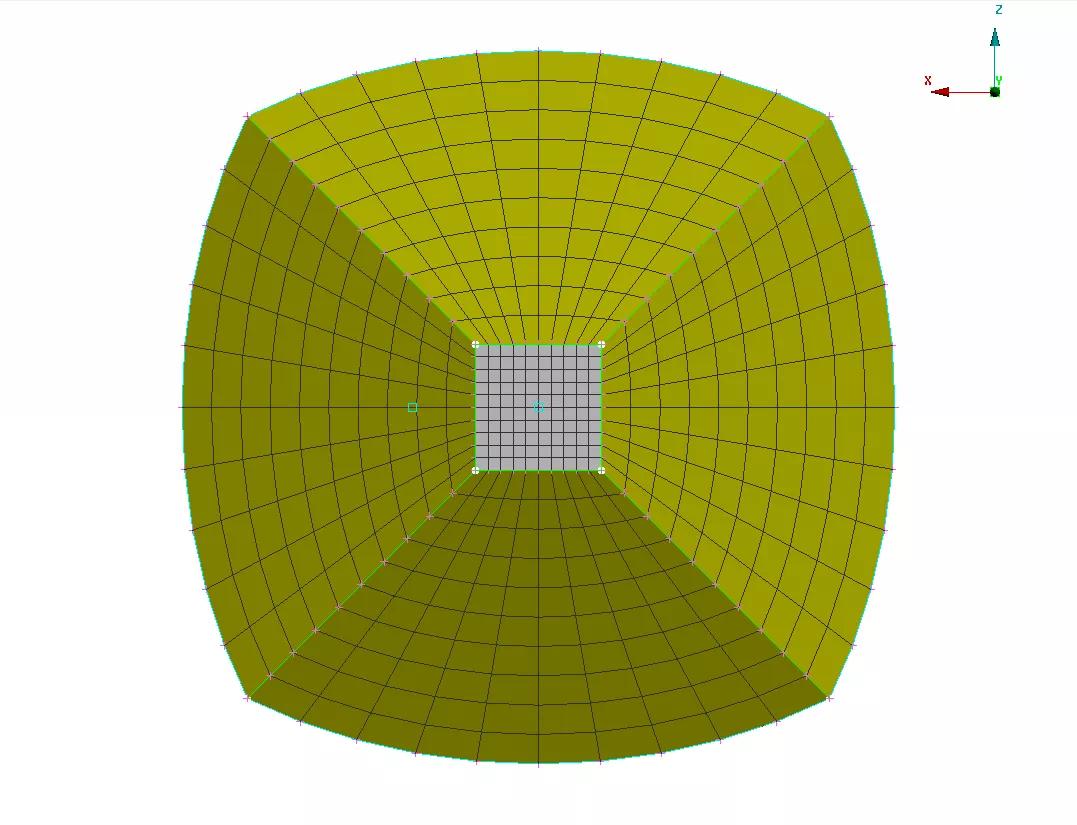
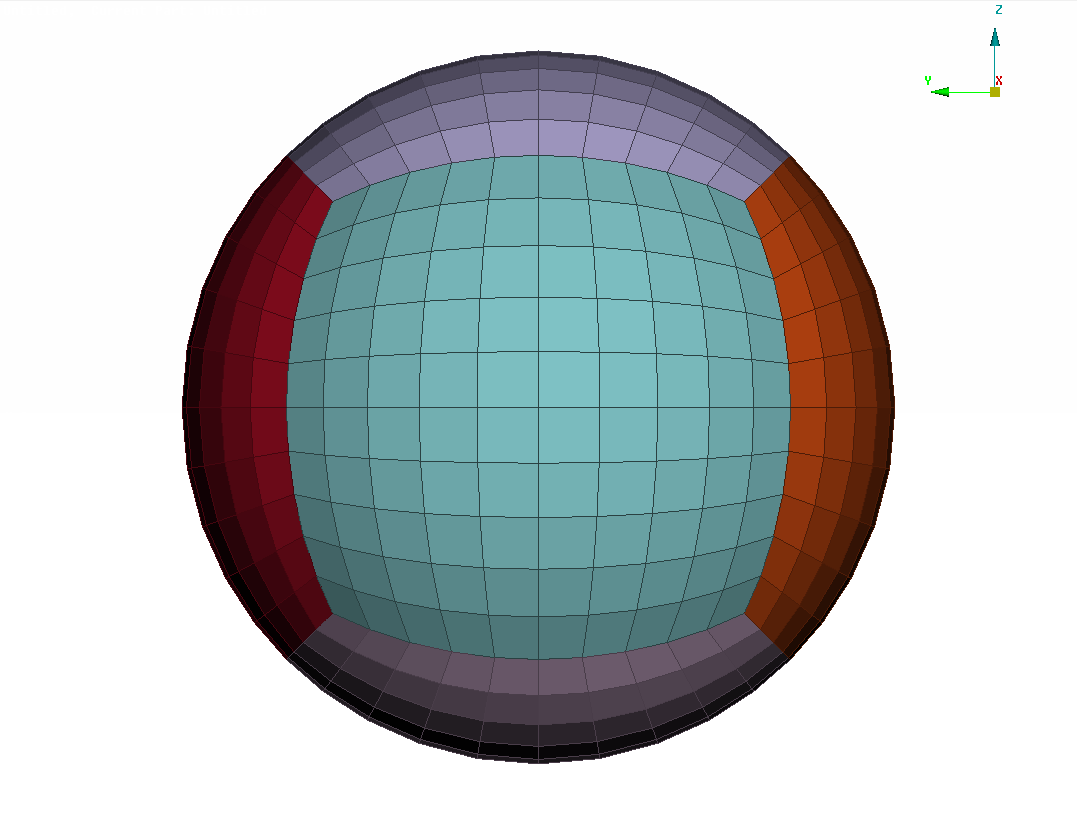
6、接下来将以上暗红色部分进行旋转**(命令:Transform > Copy > Rotate > 90°),如下所示,多来几次可以得到剩余所有部分。
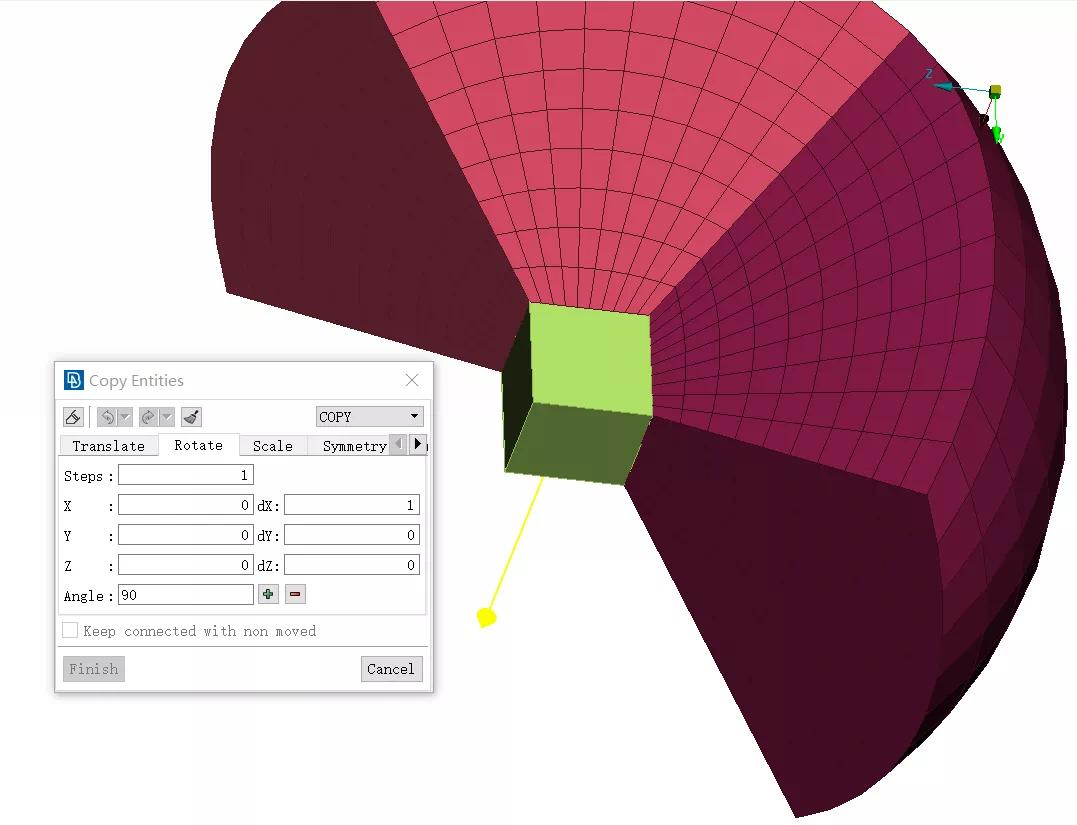
旋转**完成的球体如下所示。
7、最后对模型进行离散(命令:Volumes > release),然后对自动识别附近点将不同部分的网格粘接起来。
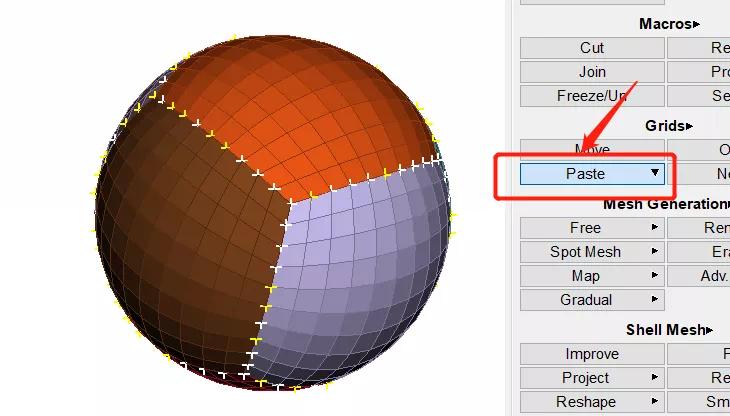
8、这样,一个球体的网格就划分完成了。
球体的体网格划分多见于轴承的滚珠建模及分析,精细的网格是非常重要的。采用如上的步骤从零开始到得到有限元模型,大致需要10分钟的时间,还是很费事的,懂得二次开发的朋友,可以试下在ANSA中进行二次开发,实现一键式生成。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















