















































软件

产品


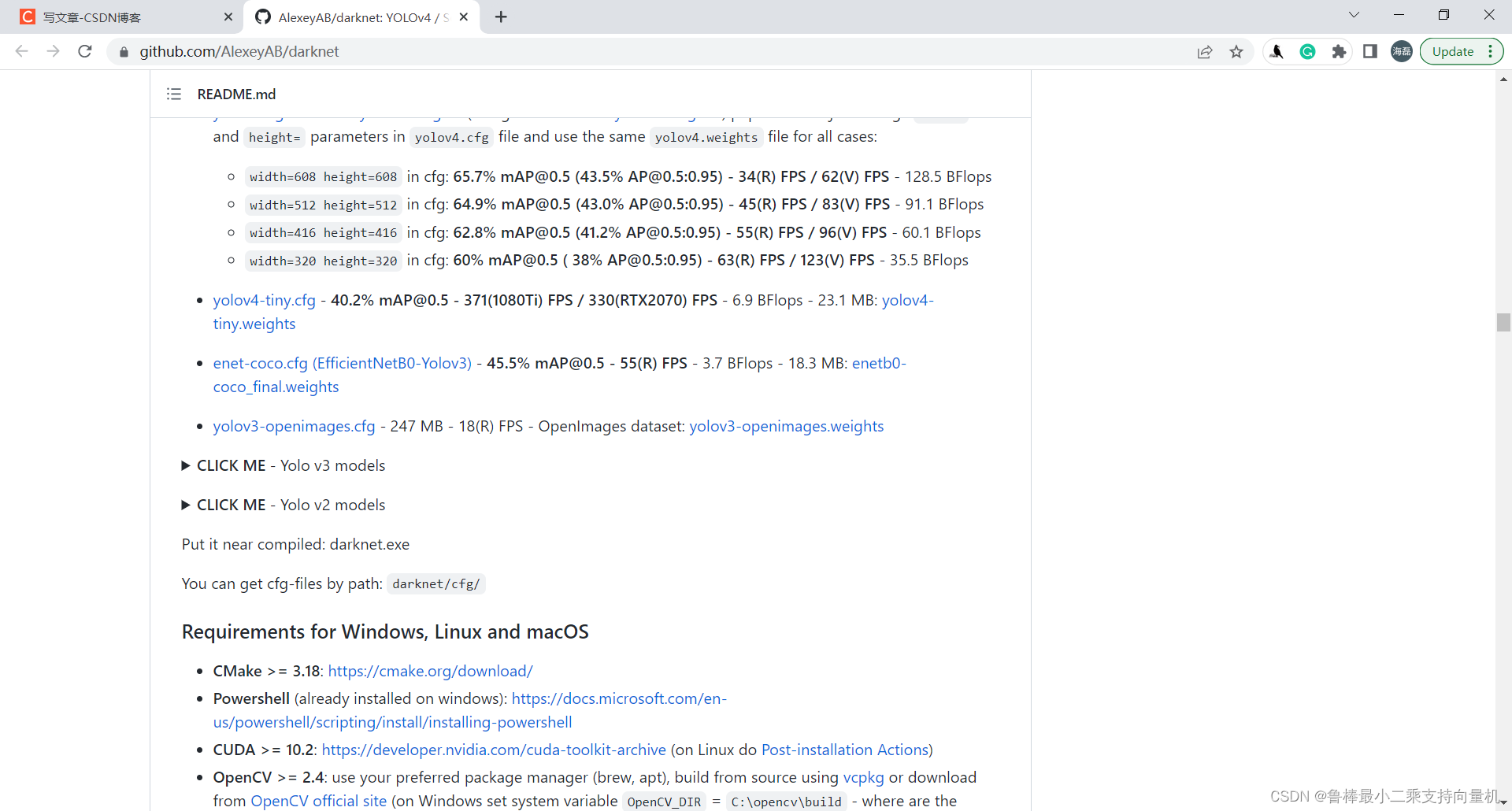
直接下载,然后解压,最后移动到Jetson TX2 NX ,如图所示,darknet下载链接: https://github.com/AlexeyAB/darknet
将解压的文件复制到Jetson TX2 NX,如图所示:
下载yolov4.weights权重文件,如图所示:
将权重文件 yolov4.weights 拷贝至 darknet 目录下,如图所示:
依次输入命令,修改Makefile
cd darknet
sudo vim Makefile
如图所示:
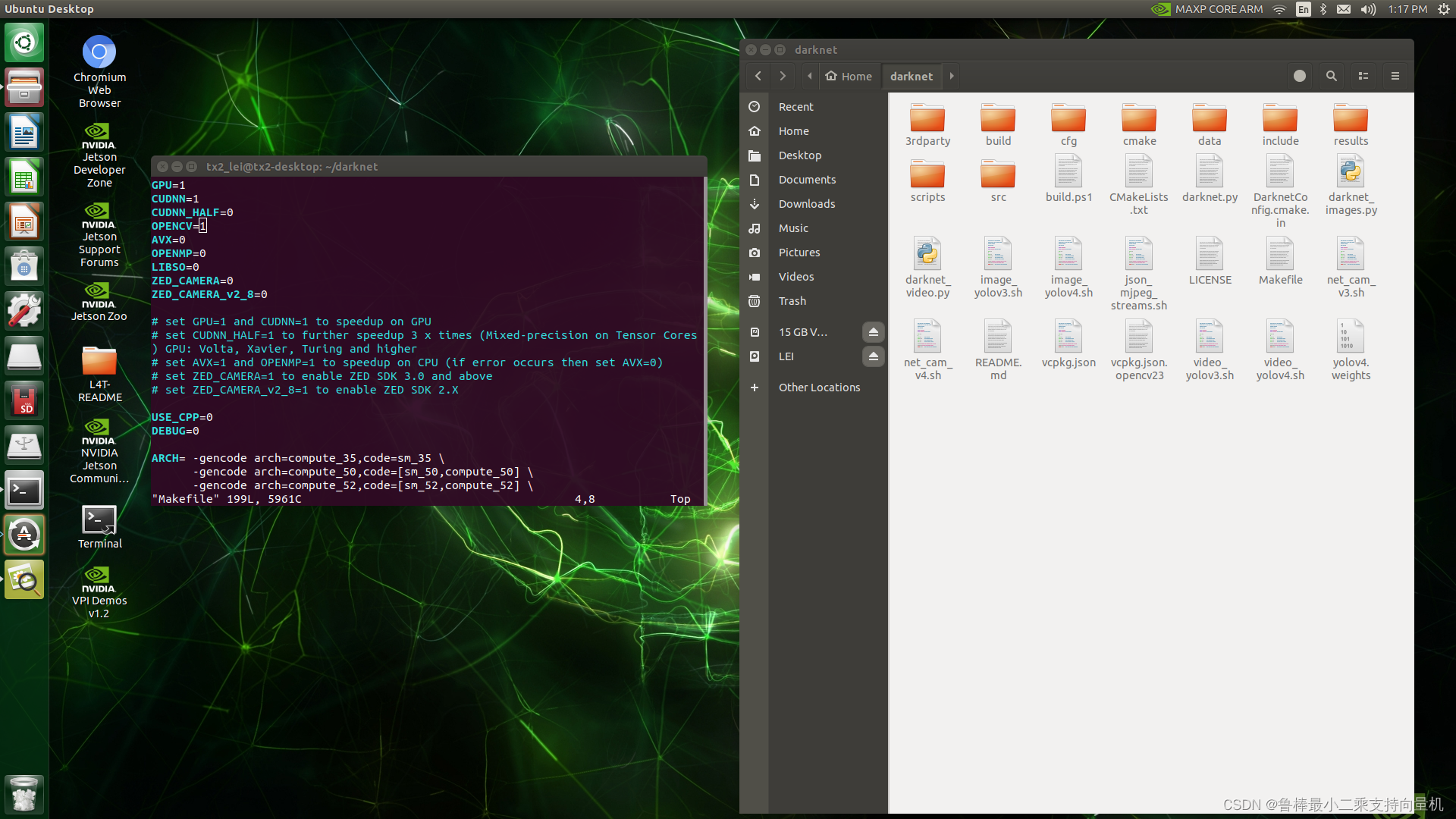
进入Makefile之后,输入i进入编辑模式,将Makefile文件进行如下修改
GPU=1
CUDNN=1
OPENCV=1
如图所示,然后按Esc,退出编辑模式,然后按:wq,保存并退出
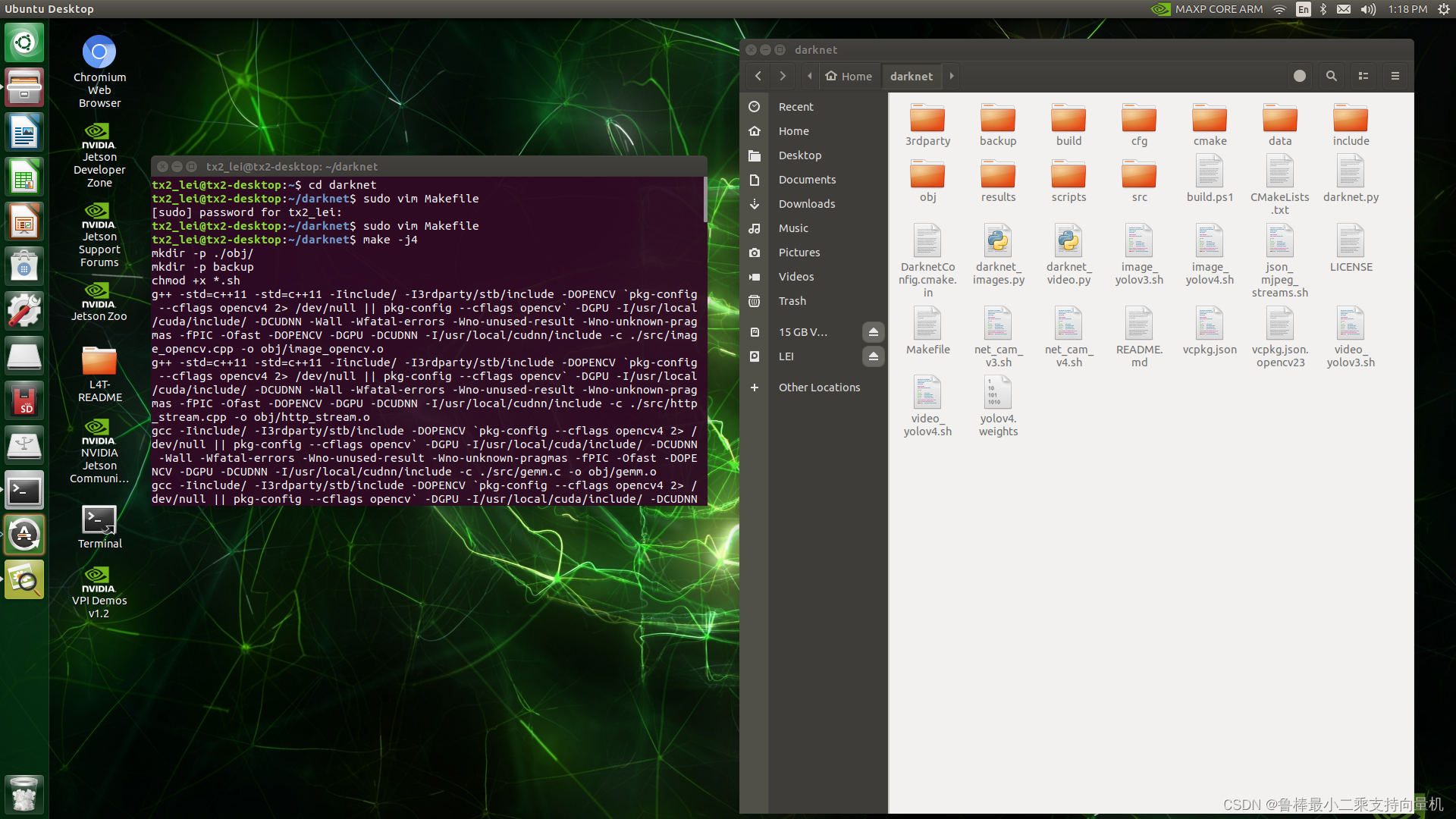
然后进行编译,输入命令
make -j4
如图所示:
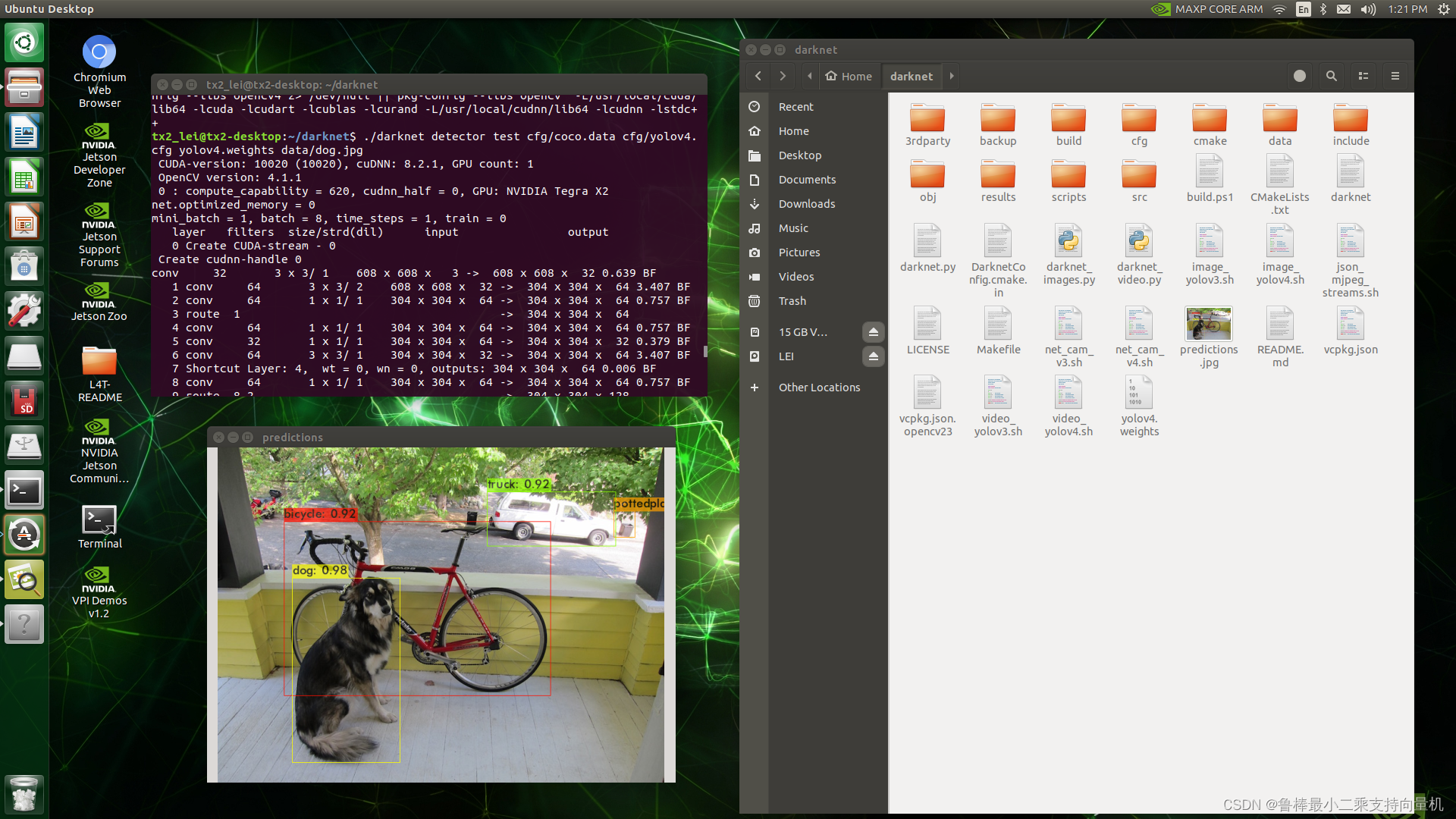
进行图片的目标检测,输入命令
./darknet detector test cfg/coco.data cfg/yolov4.cfg yolov4.weights data/dog.jpg
如图所示:
输入如下命令
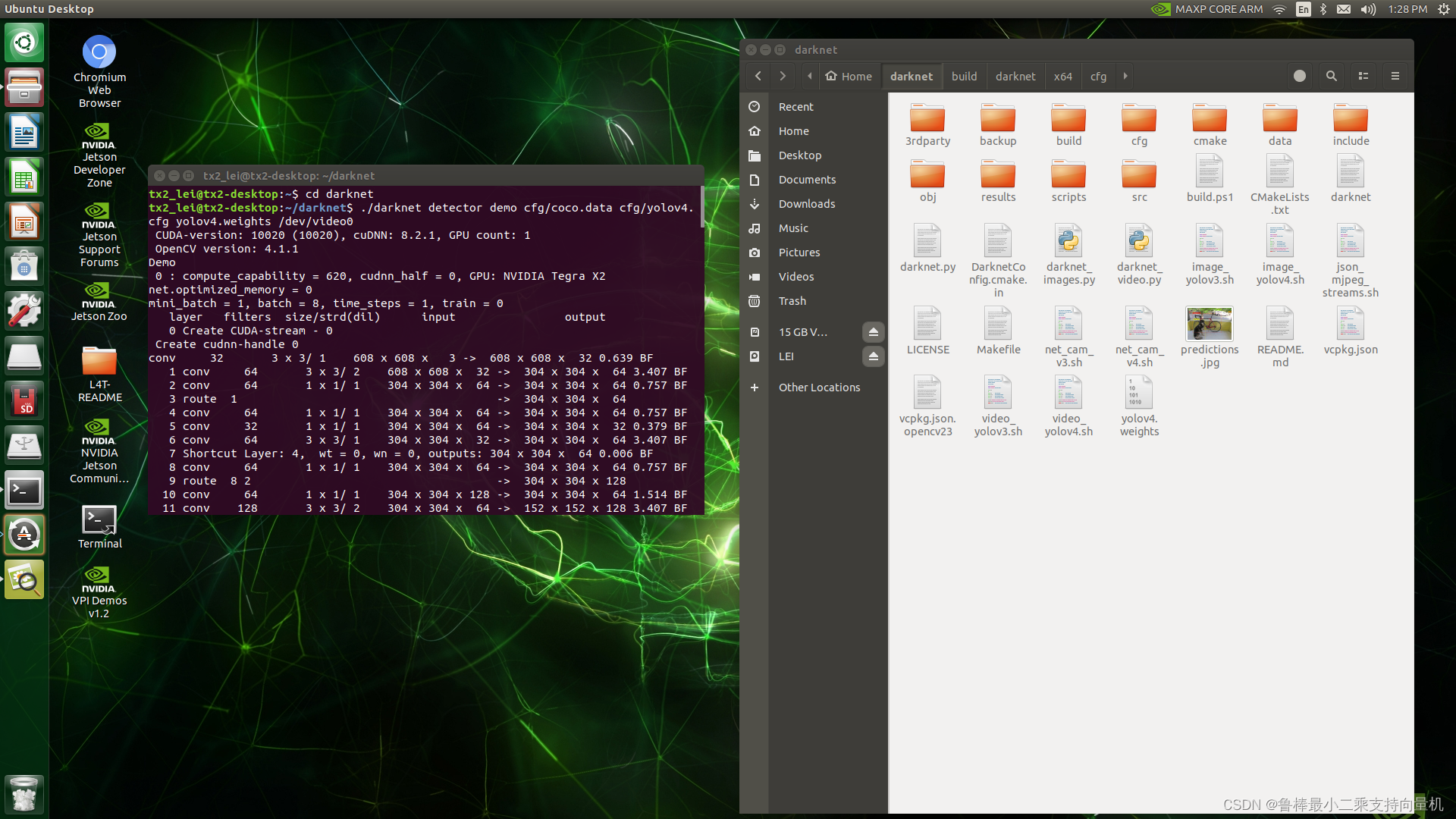
./darknet detector demo cfg/coco.data cfg/yolov4.cfg yolov4.weights /dev/video0
如图所示:
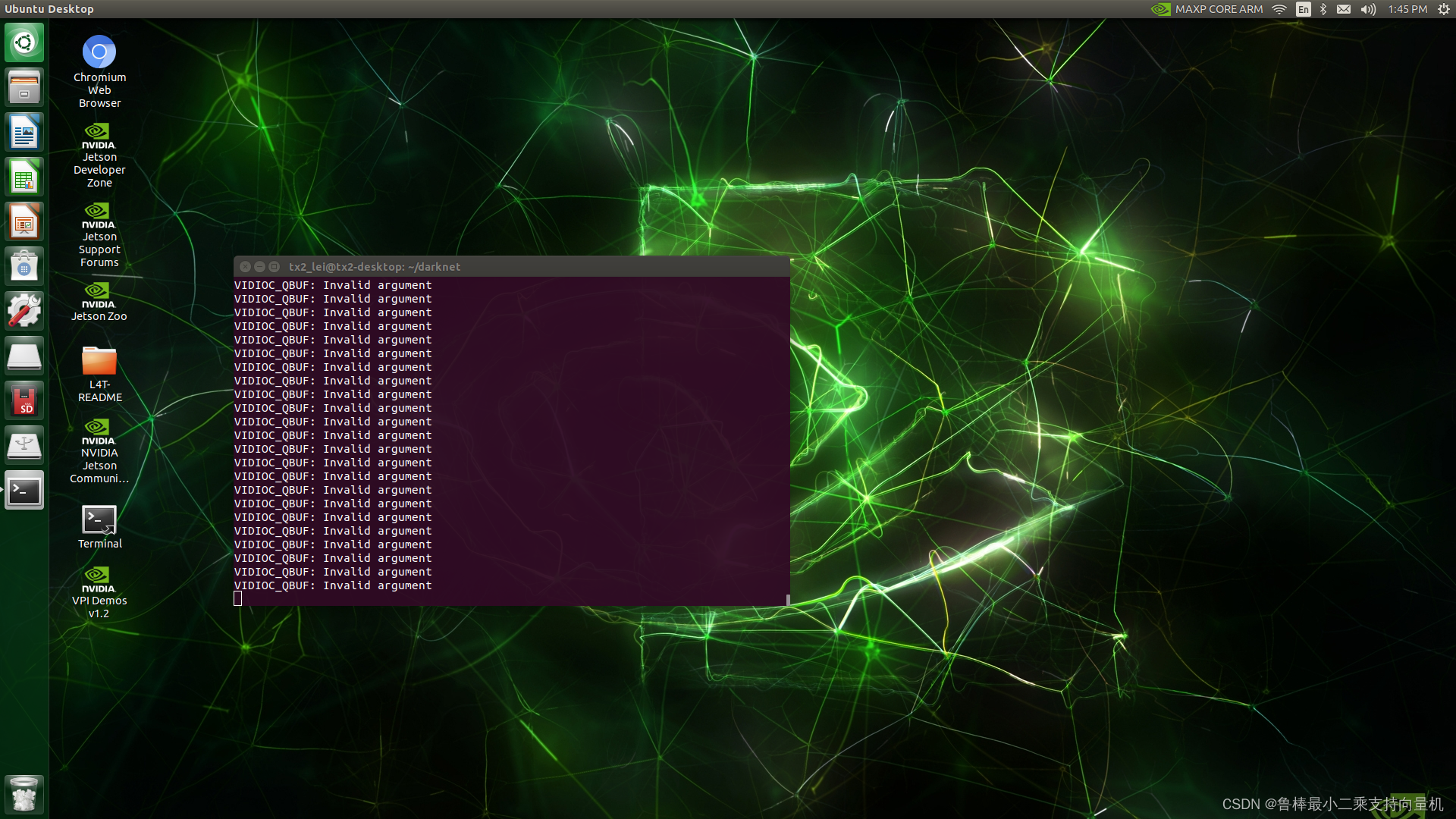
会产生如下错误:
参考大佬方法链接: jetson nano tx2 调用csi摄像头(解决摄像头蓝屏问题),成功调用板载摄像头,输入命令如下
https://blog.csdn.net/weixin_45392081/article/details/106882538
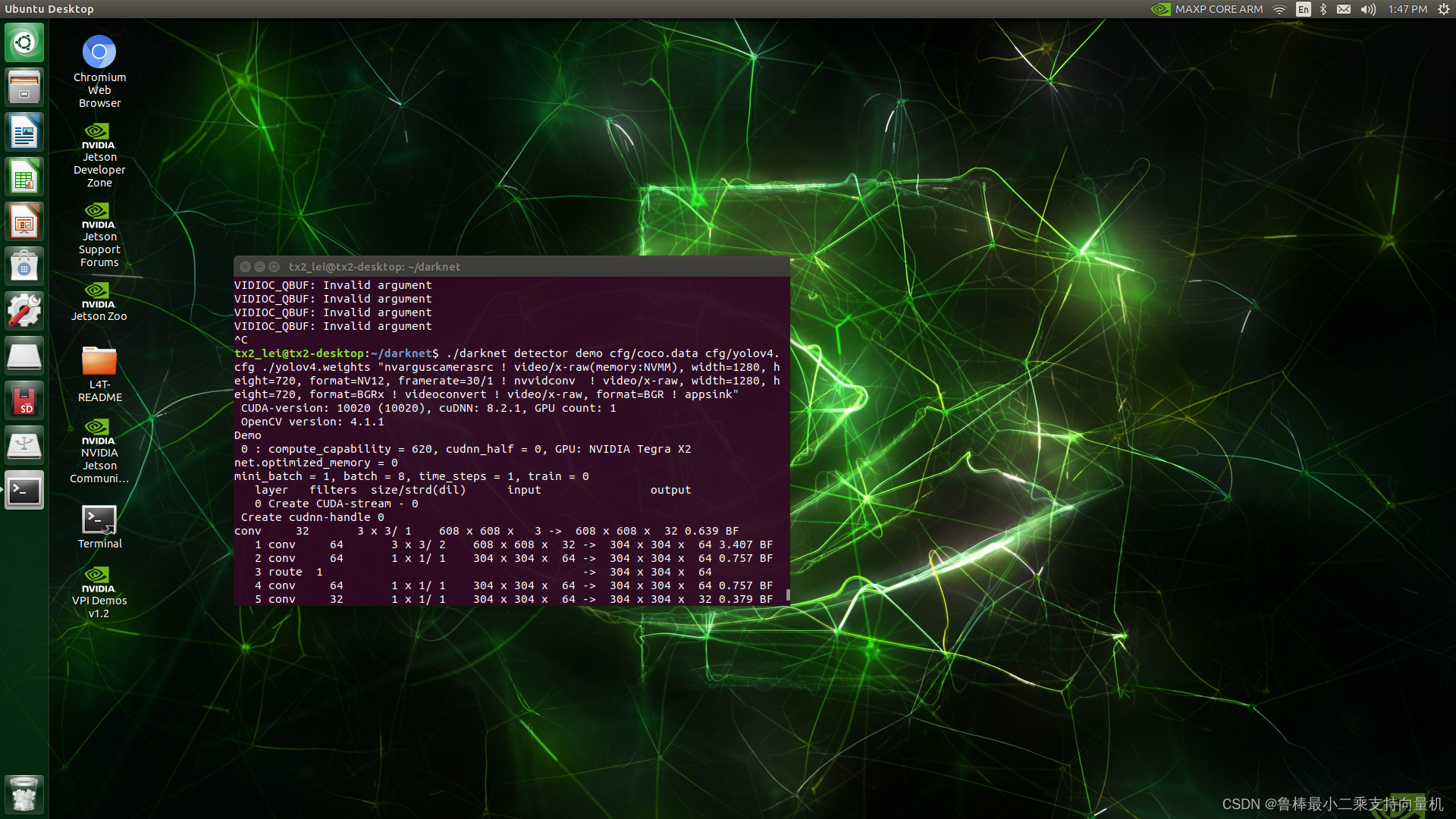
./darknet detector demo cfg/coco.data cfg/yolov4.cfg yolov4.weights "nvarguscamerasrc ! video/x-raw(memory:NVMM), width=1280, height=720, format=NV12, framerate=30/1 ! nvvidconv ! video/x-raw, width=1280, height=720, format=BGRx ! videoconvert ! video/x-raw, format=BGR ! appsink"
如图所示:
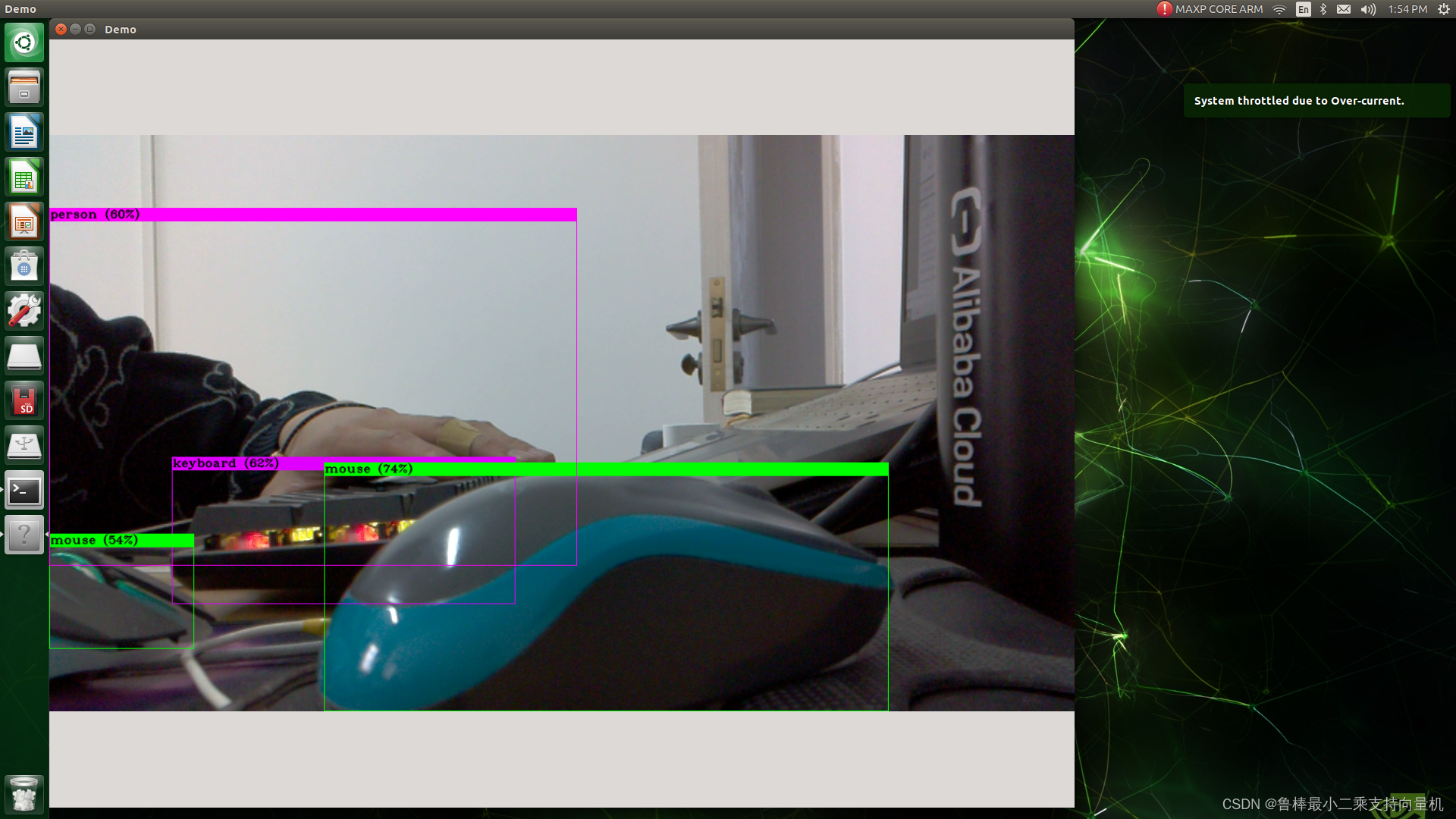
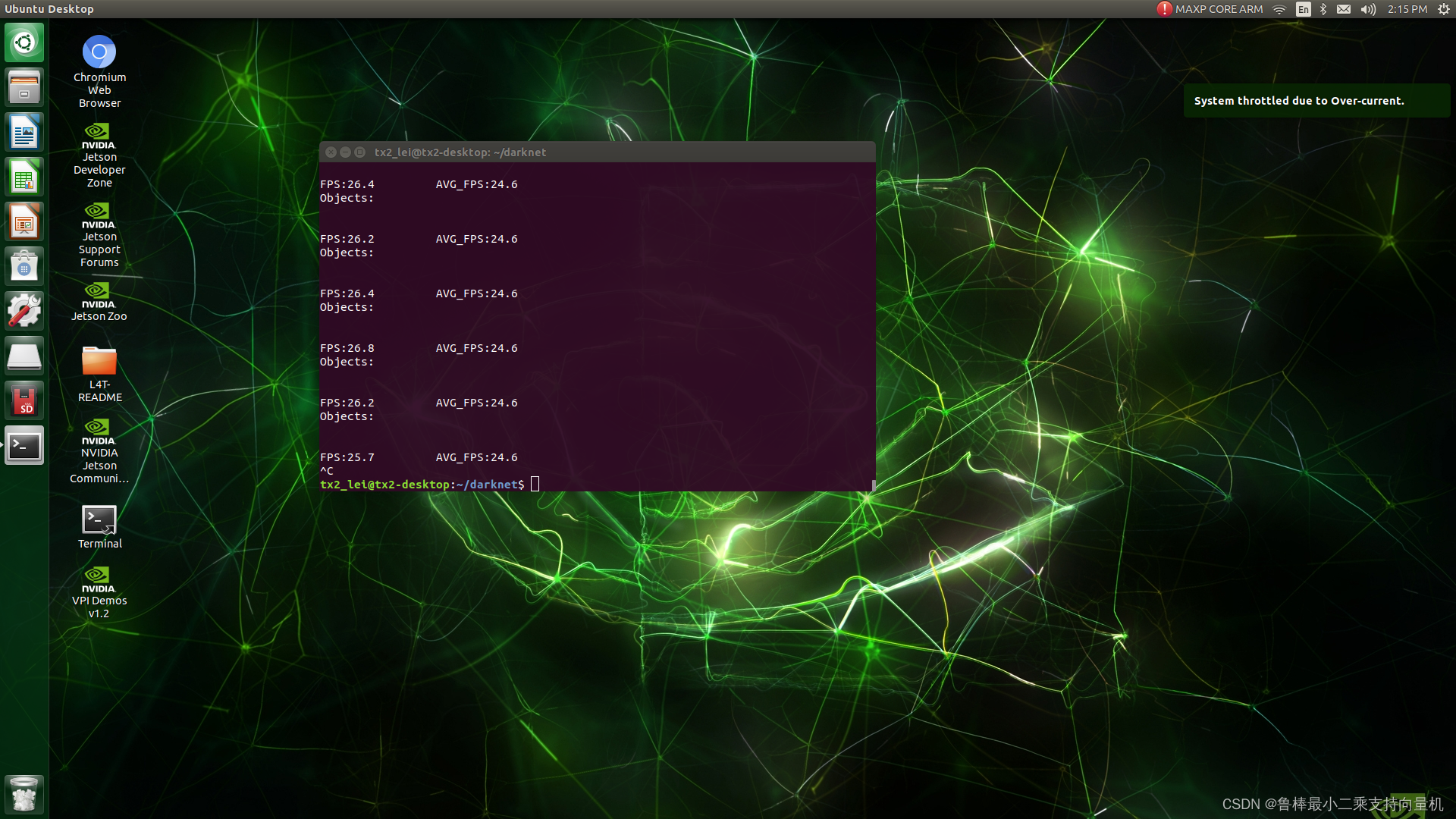
实时目标检测结果如图所示:
退出时,按Ctrl+C即可,如图所示:
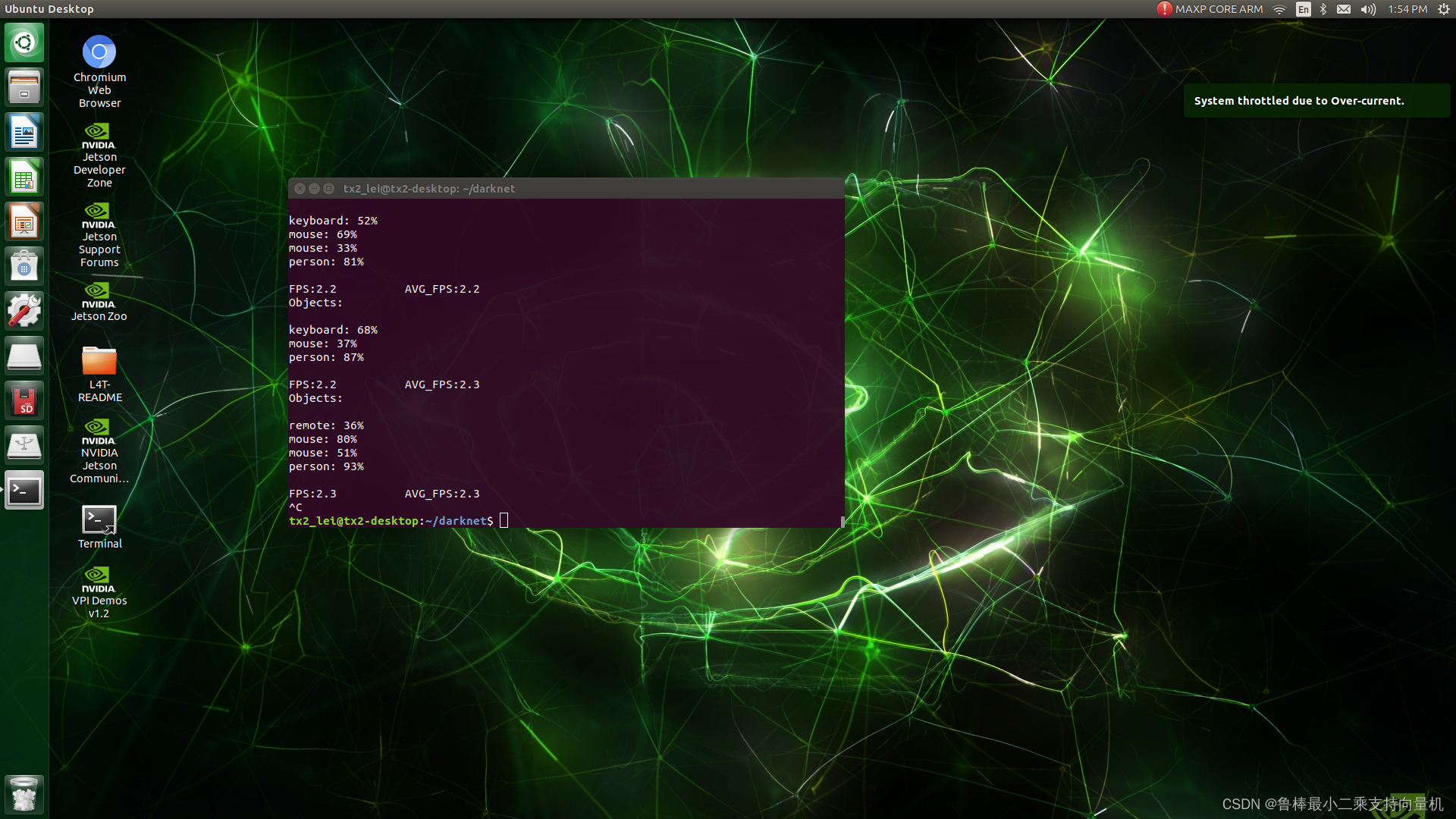
运行YoLoV4是可以发现,视频不流畅,FPS值较低,因此继续使用YoLoV4-Tiny进行实时目标检测
首先下载YoLoV4-Tiny权重,如图所示:
然后拷贝至 darknet 目录下,运行命令
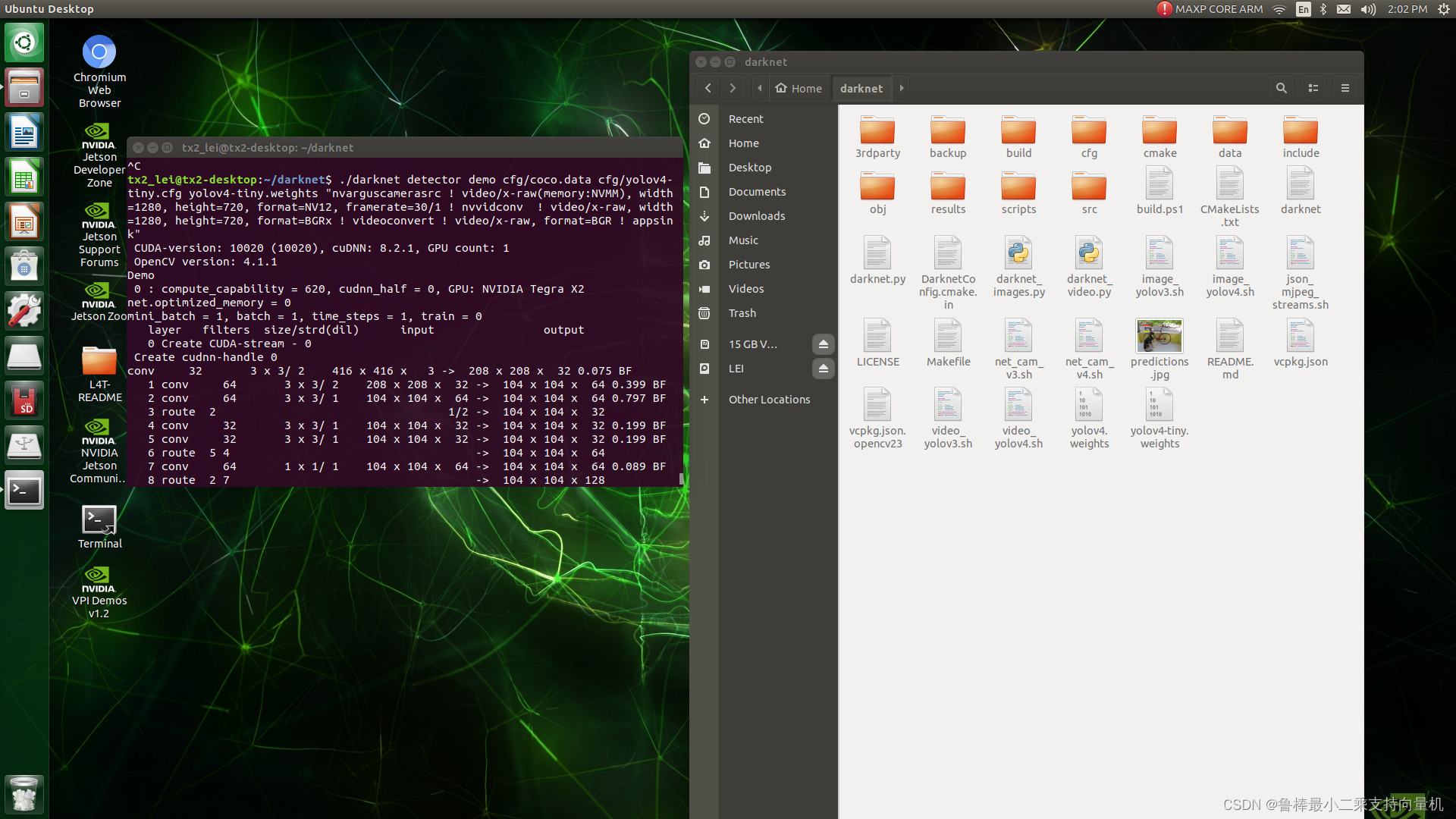
./darknet detector demo cfg/coco.data cfg/yolov4-tiny.cfg yolov4-tiny.weights "nvarguscamerasrc ! video/x-raw(memory:NVMM), width=1280, height=720, format=NV12, framerate=30/1 ! nvvidconv ! video/x-raw, width=1280, height=720, format=BGRx ! videoconvert ! video/x-raw, format=BGR ! appsink"
如图所示:
实时目标检测结果,如图所示:
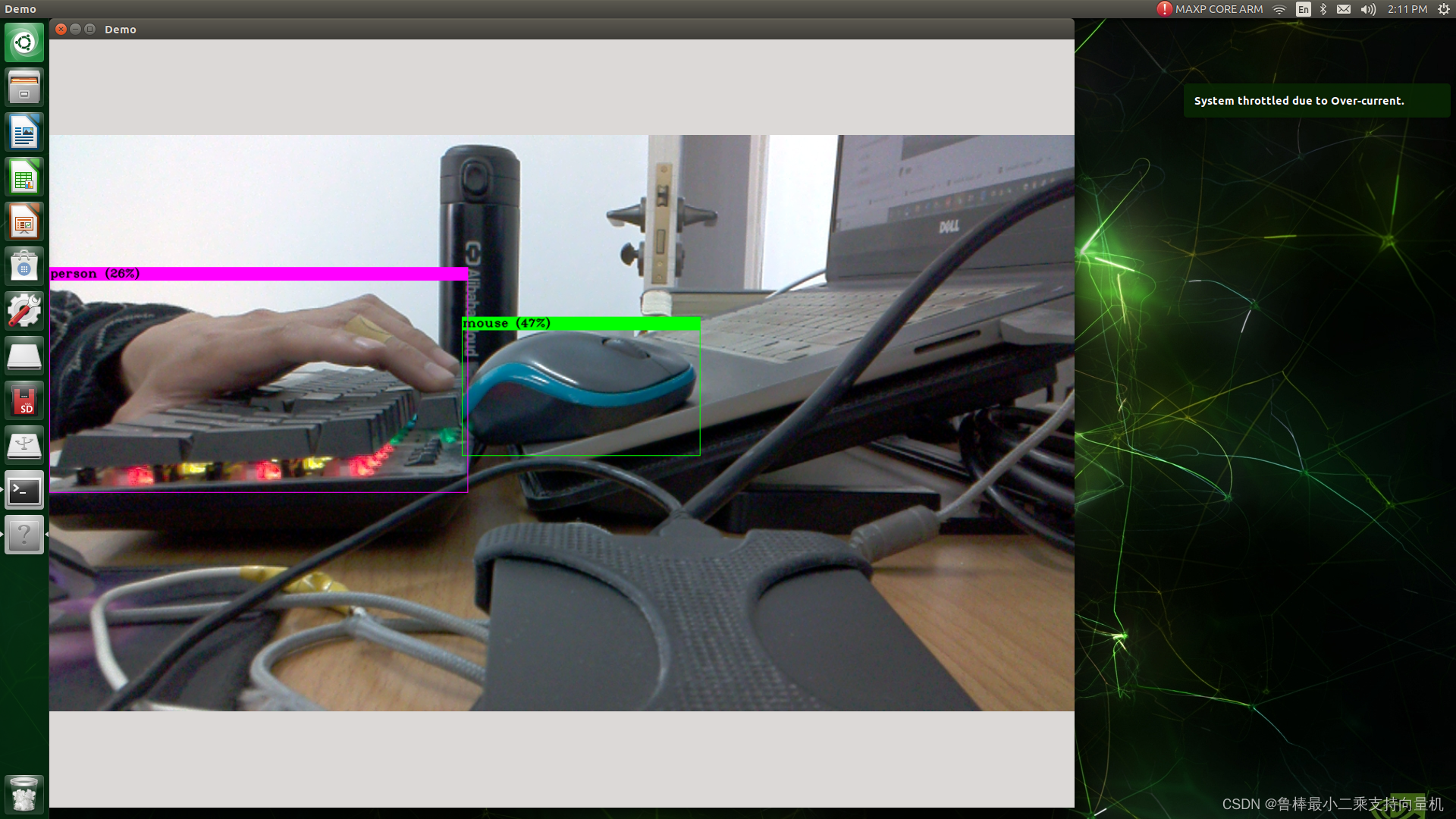
退出时,按Ctrl+C即可,如图所示:
B站视频链接: 【手把手一起在Jetson TX2 NX部署YOLOV4实时目标检测】
https://www.bilibili.com/video/BV1rh411G7WF/?share_source=copy_web&vd_source=5271dc99222d62df6a8cbae2ba96fdf1
希望本文对大家有帮助,上文若有不妥之处,欢迎指正
分享决定高度,学习拉开差距
硅言芯语硅言芯语,半导体人的硬核聊天室!
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















