















































软件

产品


0 引言
无论是设计新机械、还是利用现有机械或是作反求设计,对机构进行运动分析都是十分重要的。现代机械产品设计已逐步进入三维设计时代,众多优秀的三维CAD软件中,SolidWorks由于操作简单,使用方便,功能强大,得到了广泛应用。而Motion是一个与SolidWorks无缝集成的全功能运动仿真软件,内嵌ADAMS解算器,操作简单,可以对复杂机械系统或机构进行模拟装配、干涉分析、机械运动仿真,跟踪零件的运动轨迹,分析零件的速度、加速度、作用力、反作用力和力矩等,并将结果以动画、图形、表格等多种形式输出,以此来验证机构设计的合理性,指导修改零件的结构设计。
1870年,美国人Dederic研制出了人类历史上第一台机械式固定牧草压捆机。压捆机解决了牧草收获中由于本身疏散造成收集、处理、贮存及运输困难的问题,已发展成为牧草收获的最重要、最普及的机械。其中,压缩机构是压捆机直接进行压缩工作的运动部件,压缩机构的设计很大程度决定了压捆机的性能以及最终产品的成捆密度。压捆机设计时必须对压缩机构的运动和受力状态进行分析和计算。压缩机构多采用四杆式曲柄滑块机构,也可以是六杆机构,其中六杆式压捆机需要配置的动力较四杆式的曲柄滑块机构小,具有省力的特点。为此,利用SolidWorks软件实现了六杆式压缩机构的三维实体造型、装配、机构运动仿真以及运动部件的干涉检查,旨在提高压捆机的工作性能,缩短设计周期,降低开发成本。
1 Solidworks机构运动仿真方法
利用SolidWorks进行机构运动仿真,为简单起见,可以在机构力学模型的基础上,根据机构运动简图建立实体模型,然后利用Motion插件进行运动分析。其操作步骤如下:①在SolidWorks中生成机构的三维实体模型(包括零件与装配体的模型)。②确保已激活Motion插件。此时由模型中的固定/浮动状态自动设置零件为静止或运动,由零件的装配方式自动设置约束类型。③将运动应用到零件。④运行模拟及生成可视化结果。⑤分析结果。
2 六杆式压缩机构力学模型
压捆机工作时,通过输送喂入装置,把牧草喂入到压缩室,在压缩机构的作用下,活塞往复运动,对牧草提供压缩力,把牧草压成草捆,打结后推向压缩室出口。六杆式压缩机构简图如图1所示。其工作原理是:当曲柄1顺时针方向旋转,经过连杆2,4带动活塞5在机架上往复移动;杆件1,2,4及机架组成曲柄摇杆机构,推杆4分别连接在连杆2上铰链点C和活塞5的铰链点E处,推动活塞5在压缩室内往复运动,活塞右侧为牧草,活塞的往复直线运动实现对牧草的压实。工作时,曲柄1在动力机械的带动下以角速度ω顺时针匀速转动,对AB杆以B点为矩心考虑力矩平衡,因为AB长度大于BC的长度,故A点承受较小的力,就能对C点产生较大作用力。
如图1,给出设计数据如下:曲柄OA匀速转动,角速度ω1=5rad/s。各杆长度为:lOA=/50mm,lAB=600mm,lBC=120mm,lBD=500mm,lCE=600mm,XD=400mm,yD=500mm,yE=600mm。
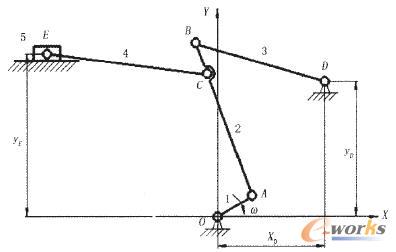
图1 六杆式压缩机构运动简图
3 六杆式压缩机构的三维实体建模
六杆式压缩机构三维实体模型如图2所示。首先,借助Solidworks的实体建模功能,将图1所示机构的6个零件以杆件的形式,用拉伸、切除特征进行三维造型,并保存。零件建模完成后,采用自下而上的设计方法建立装配体的三维模型。装配时先插入机架,使得机架的3个定义平面与装配体的3个定义平面重合,将机架完全约束固定,再通过各零件的相互配合关系生成机构模型。完成虚拟装配以后进行干涉检查,能够发现机构构件布置的干涉和机构运动的碰撞等问题,若出现干涉,可以查看到具体干涉位置,及早对相应部位进行修改设计,直至设计合理。
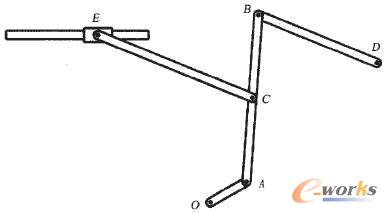
图2 等效六杆式压缩机构三维模型
4 六杆式压缩机构运动仿真与分析
4.1 激活插件
首先,确保已激活Motion插件。在“工具”下拉菜单“插件”中,选择“SolidWorks Motion”并启动。在Solidworks中打开机构的装配体文件,右键生成新运动算例,选择分析类型为“Motion分析”。Motion会自动映射SolidWorks配合以派生运动副,本例中采用的是旋转副和移动副。SolidWorks Motion中固定和运动的零部件由它们在SolidWorks模型中的固定/浮动状态决定(如图1所示)。为此,机架为静止件,其余构件为运动件。
4.2 设置运动驱动
运动驱动是加在运动副上控制运动的运动参数。这里根据图1六杆机构力学模型中给定的已知条件和参数,模拟机构的运动,选择等速旋转马达作为机构的动力来源,将曲柄l与机架的转动副设置为运动驱动,角速度为ω1=5rad/s(顺时针转动)。
4.3 设置仿真参数
仿真之前,要对仿真参数进行设置,如力的单位、时间的单位、重力加速度,以及与动画有关的帧时间、帧时间间隔等。这里设置力的单位为kN,时间单位为s,仿真时间为3s,仿真画面时间间隔为0.15s,仿真帧的数目为550,时间间隔和帧数可以根据仿真精度要求作适当调整。仿真x轴为时间,y轴为所需仿真的参数值如位移、速度或加速度、作用力等。在“运动算例属性”中的“图解默认值”中,设置绘图的边界、图形区域背景颜色;设置栅格线的有无、线条的颜色及宽度;设置轴线的颜色、宽度,轴上刻度线的位置,x轴与y轴的最小值、最大值、主单位、次单位;设置字体、比例等。本例选择曲柄处于水平位置时作为机构运动仿真的起始位置。
4.4 仿真与分析
设置好仿真参数以后,就可以进行仿真了。单击“计算”工具,运行仿真。在Motion中,对仿真结果的显示和分析方法主要有:①将结果用动画的形式表示,即将动态仿真用AVI动画保存播放;②将结果以坐标曲线的图形表示;③将结果以Excel表格数据文档形式输出。本例利用图形与Excel表格数据相结合的方式来分析仿真结果。以活塞为主要分析对象,在仿真结果中选取分析类别为线性位移、线性速度、线性加速度,分析方向为X轴,仿真结果如图3~图5所示。在仿真结果中选取反作用力选项,分析方向为X轴,对活塞与连杆铰接点的X方向作用力进行分析,如图6所示。
以曲柄OA水平位置为仿真计时起始点,相对图1所示坐标系活塞初始坐标XE=-369.11mm。上面各仿真图形中,横坐标代表时间t,单位是s;纵坐标代表各仿真量。观察以上曲线可以看出:在活塞往复运动过程中,活塞的位移、速度以及加速度都随时间呈周期性变化。
为了直接读出数据进行分析,将仿真结果输出生成Excel数据表格文件,通过MAX和MIN函数统计出仿真量的最大、最小值,可以精确得出:当曲柄OA杆以角速度ω=5rad/s匀速转动时,活塞在一个冲程内的极位夹角为72.04°,前极点位置坐标为(-356.3,0,0),后极点位置坐标为(-580.0,0,0),圆整后可确定活塞的实际有效行程为224mm,以此来检验是否满足设计预定的有效行程。同时,活塞速率变化范围为-739.4≤u≤402.3mm/s,活塞加速度变化范围为一3953.6≤a≤4136.1mm/s2,活塞铰接点X方向受力最大值为4898N,为设计所需压缩力提供了参考依据。
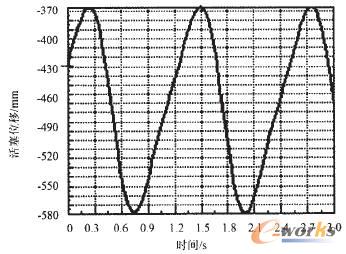
图3 活塞位移曲线
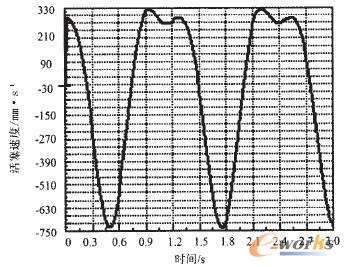
图4 活塞速度曲线
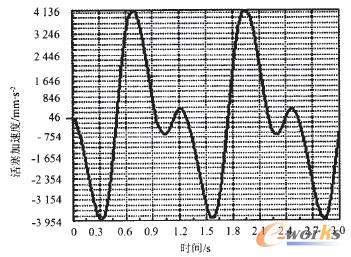
图5 活塞加速度曲线
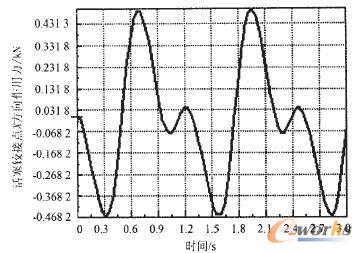
图6 活塞铰接点X方向作用力
5 结论
采用Solidworks软件建立了压捆机六杆式压缩机构的三维实体模型,实现了该机构的建模、装配、干涉检查以及运动仿真,得出了活塞在预定条件下的位移、速度、加速度以及活塞与连杆铰接点X方向的受力变化规律;考查了活塞的极位夹角、有效行程以及活塞铰接点的受力变化规律。通过运动仿真对压捆机的压缩性能进行分析,设计方案的合理性进行验证,结果用来指导修改设计,可在设计模式下直接修改模型参数,为主要结构参数提供了理论依据,重复仿真分析,便可得到更加合理的机构设计方案。仿真模拟验证了方案的可行性,提高了机械设计的效率,具有很强的实际工程应用意义。
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















