















































软件

产品


0 引言
机械手对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。工业机械手可以代替人手进行繁重的劳动,显著减轻工人的劳动强度,改善劳动条件,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门,更能提高劳动生产率和自动化水平。随着现代生产的机械化和自动化的发展,对机器人的需求越来越大,因而对机器人的末端执行机构机械手的研究尤为重要。一些软件的发展为机械手的设计分析提供了方便,降低了生产成本,本设计是基于SolidWorks软件,使得设计效率大大提高。
本文是为普通车床配套而设计的上料机械手。它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的向动化技术设备。
1 机械手的工作原理
上料机械手直接与工件接触,它能执行人手的抓握功能。手抓取物体以物体为中心,用两根手指包络物体。根据抓取物体时的相对状态,靠手指与工件之间的摩擦力来夹持工件。本上料机械手采用二指平动手爪,属于夹持式手爪,手指由四杆机构带动,当上料机械手手爪夹紧和松开物体时,手指姿态不变,作平动。机械手手爪的结构见图1,①为支架、②为气动杆、③和④为大螺钉、⑤和⑥为三孔连杆、⑦为小螺钉、⑧为短连杆、⑨和⑩为手指。
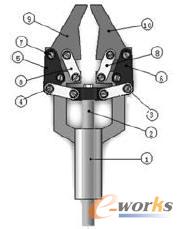
图1 机械手装配简图
它是通过气动杆②来传动力的,气缸带动气动杆②使之向上移动时,其它的杆件共同运动,此时手爪是处于握紧工件的过程;反之,当气缸带动气动杆②向下移动时,手爪是处于张开的过程。这样,用气缸带动气动杆②做往复平动,从而使其它杆件运动,带动手爪张合,手指上的任意一点的运动轨迹为一弧摆动。
2 基于SolidWorks的机械手三维建模设计
2.1 SolidWorks介绍
SolidWorks是一款功能强大的中高端CAD软件,方便快捷是其最大特色。该软件以参数化特征造型为基础,具有功能强大、易学、易用等特点,是当前最优秀的中档三维CAD软件之一。SolidWorks有全面的零件实体建模、生成工作机构的分解动画制作和高级动画制作等功能。
2.2 对三孔板的建模
(1)启动SolidWorks,创建一个新的零件文件;
(2)绘制草图。分别选择“草图”工具栏中的直线、圆弧等功能按钮建立草图并标注尺寸如图2所示;
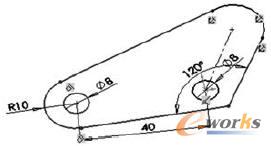
图2 绘制草图
(3)拉伸实体。执行“插入”中的“凸台/基体”中的“拉伸”菜单命令,或者单击“特征”工具栏的“拉伸凸台/基体”图标,此时系统弹出“拉伸”对话框。在“深度”一栏中输入值9,然后单击“确定”图标,如图3;
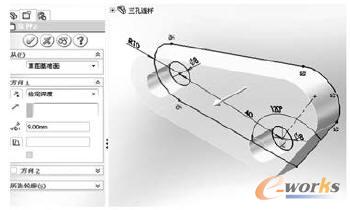
图3 拉伸实体
(4)圆角实体。执行“圆角”菜单命令,在半径一栏中输入10,然后单击“确定”按钮;
(5)绘制螺纹底孔。在建立草图的面上再建一草图直径为4.92的圆,在“深度”一栏中选择“完全贯穿”最后单击“确定”按钮;
(6)插入螺旋线。在该对话框中的“定义方式”下拉列表框中选择:螺距和圈数(定义螺旋线时,必须指定两个数值,第三个数值会被自动计算出来)分别输入下图所示值后单击确定按钮,完成螺旋线的插入;
(7)建立扫描除料草图。首先添加基准面,选择创建的基准面建立扫描除料草图并如图4;
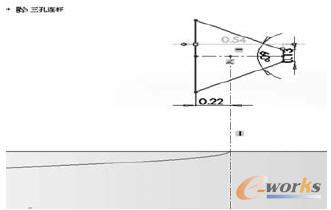
图4 建立扫捕除料草图
(8)扫描切除实体。单击“特征”工具栏中的“扫描切除”图标,此时系统弹出“切除-扫描”对话框。在“轮廓”一栏中,用鼠标选择上一步骤画的草图;在“路径”一栏中选择前面插入的螺旋线如图5所示。单击对话框中的“确定”图标,经过倒角最终模型如图6所示。

图5 扫描切除后的图形

图6 三孔连板
2.3 其它零件建模及装配体的建立
用以上建模方法还建立了其他零部件模型,如图7所示。

图7 其它零件建模
将所有的零件三维模型建立后,就可以将之进行装配。创立一个新的装配体文件,选择需要的零部件,将各个零部件插入装配文件中,添加各零部件配合关系,完成装配体如图1所示。
3 结论
本文对机械手机构进行设计研究,运用SolidWorks对其结构建模设计。本次设计充分利用了计算机辅助设计,基于SolidWorks的机械手三维建模很好地实现预期设计,对系统设计起到了很好的效果,提高了设计效率。
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















