















































软件

产品


洗瓶机构是工艺流程中的常见机械,一个完整的洗瓶机包含送料系统、清洗系统以及后续的加工包装系统。本篇文章对洗瓶机进行了简单的模拟分析。
一、装配
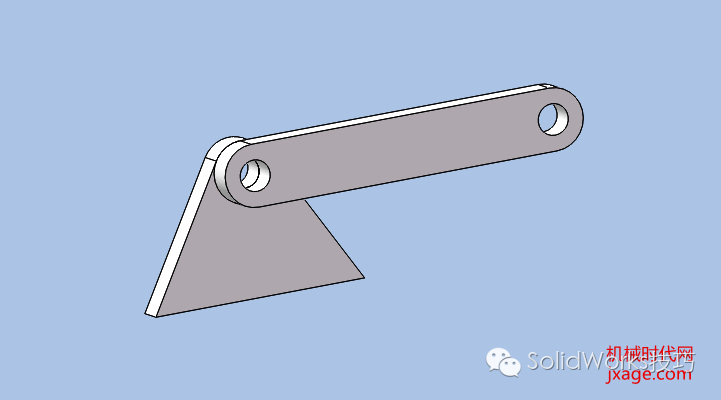
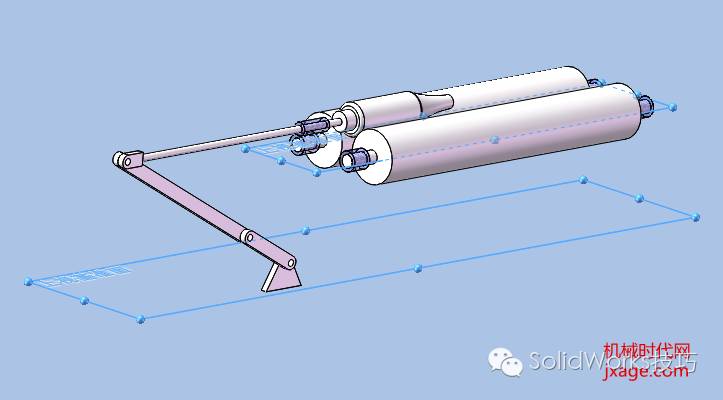
1.新建组件。依次插入机架和曲柄如下图所示,采用同轴心配合和重合配合。
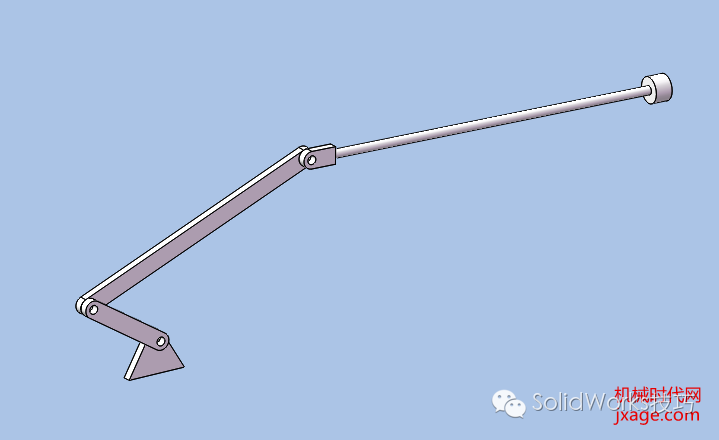
2.插入连杆和推杆,同样采用同轴心配合和面重合配合。
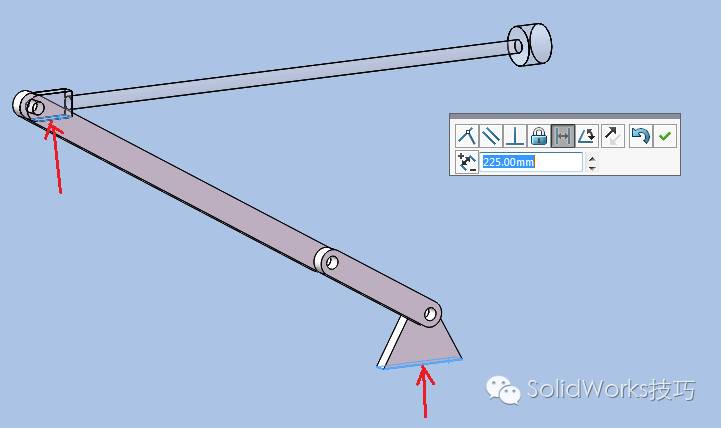
3.添加平行配合,选择如下图所示的两个平面。
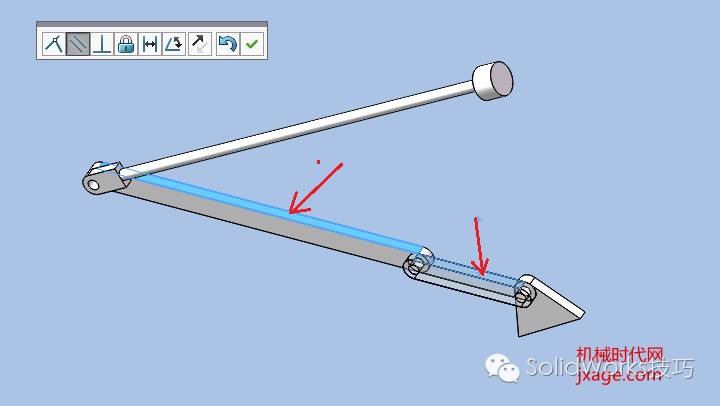
4.添加平行配合,距离设置为225.
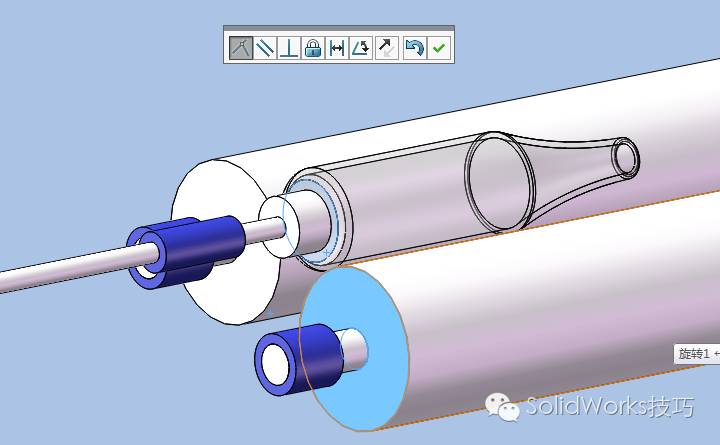
5.插入套筒和两个导辊。
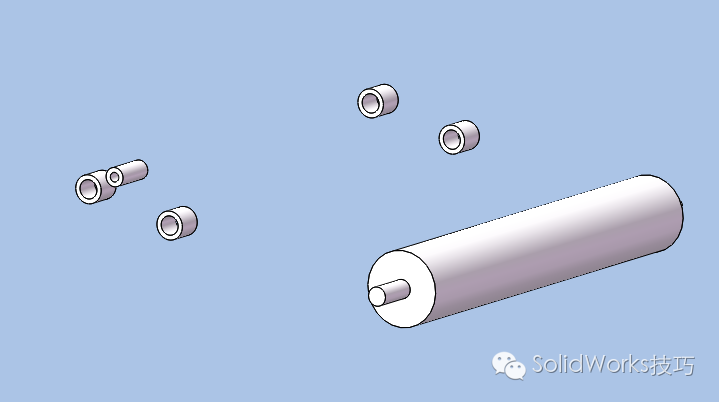
导辊和套筒采用同轴心配合和面重合配合,如下图。
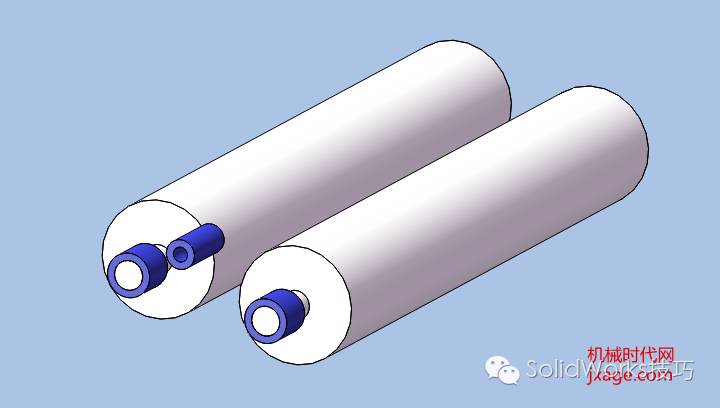
6.添加推杆和套筒的同轴心配合。
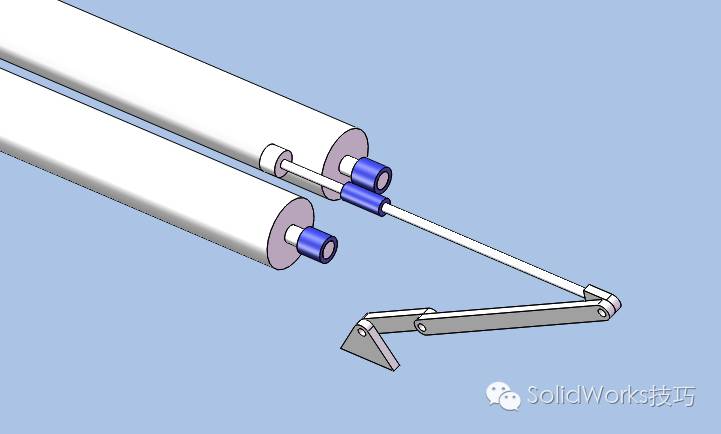
7.插入瓶子,瓶子与推杆采用同轴心配合和面重合配合,同时使瓶子的端面与导辊的端面进行重合配合。
8.添加套筒和组件的如下的两个面进行平行配合。
完成。将曲柄与连杆的平行配合、机架与推杆的距离配合,推杆与瓶子的重合配合以及同轴心配合,瓶子与导辊的重合配合进行压缩,将机架和套筒设置为固定零件。

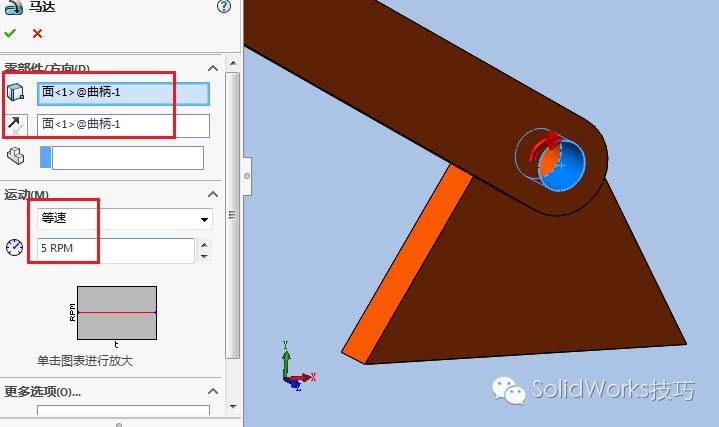
9.添加马达。为曲柄添加一个顺时针转速为5r/min的等速旋转马达
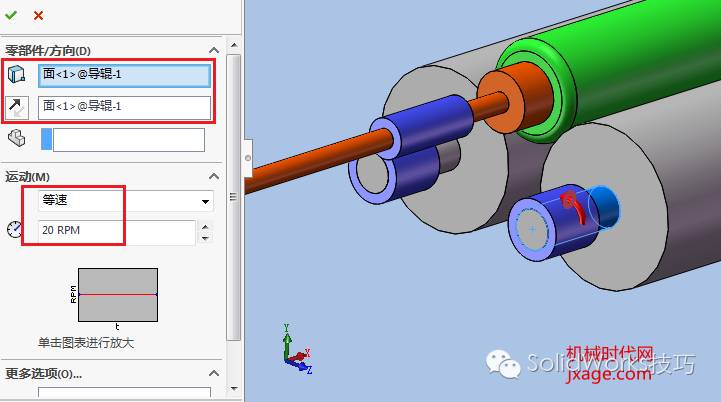
同理为两个导辊添加相同转向,转速为20r/min的等速旋转马达。
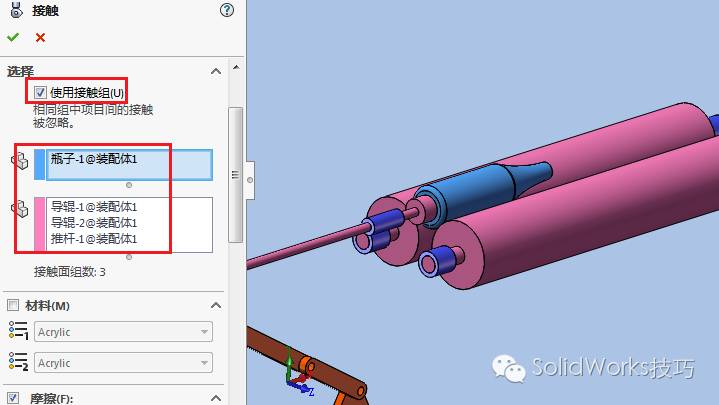
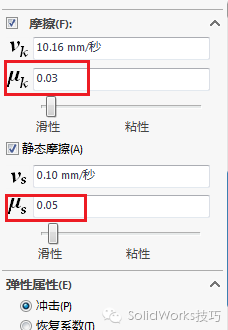
10.添加实体接触。勾选使用接触组,零部件组1选择瓶子,零部件组2选择推杆和两个导辊,取消勾选材料复选框,自定义接触之间的摩擦系数,动摩擦因数设置为0.03,静摩擦因数设置为0.05.
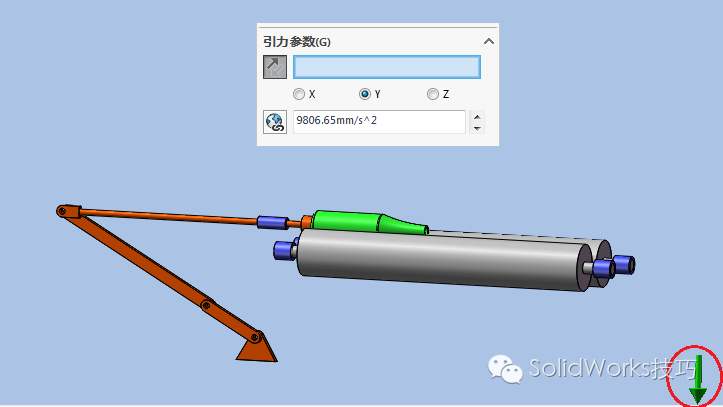
11.添加引力。按照下图设置引力方向。
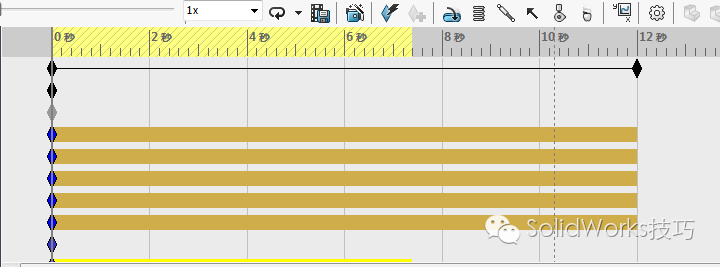
11.因为曲柄的转速为5r/min=30°/s,故将仿真时间设置为一个周期即12s,单击计算按钮进行求解。
12.单击工具栏上的结果与图解按钮,进行如下的参数设置。
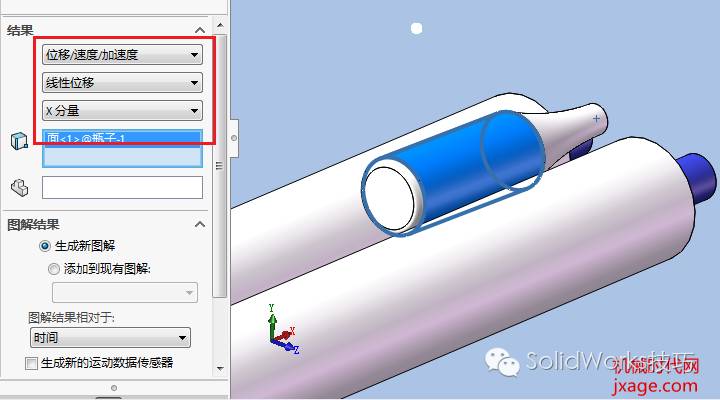
单击确定生成瓶子的线性位移图解,如下图所示。

同理,创建瓶子的角速度的X分量图解和推杆的线性速度的X分量的图解。
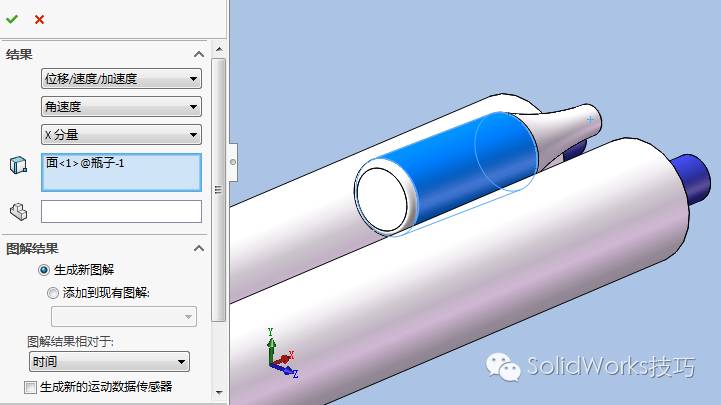
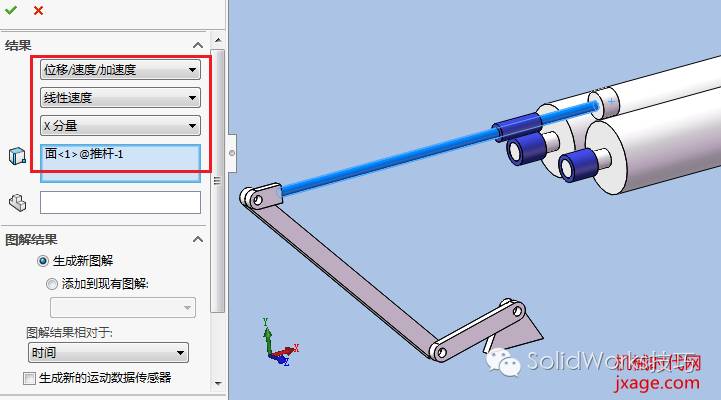
测得的图解曲线如下图所示。
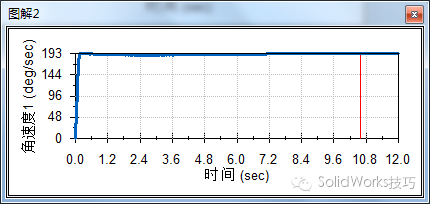
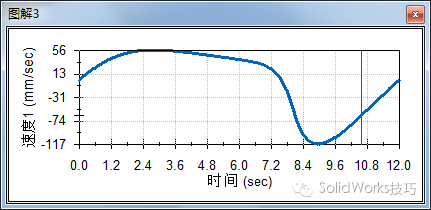
由以上三幅曲线图,我们可知瓶子的移动距离为313mm,即为洗瓶机构清洗工作行程,单个周期内工作行程所用的时间为t1=7.6s,回程时间t2=4.4s;同时,瓶子在移动的过程中绕自身轴线旋转,且角速度较稳定,基本维持在193°/s;推杆在推瓶的过程中,刚接触和离开瓶子时,因为速度正负之间连续变化,固其线性速度有一定的波动;推瓶机构的行程速比系数为K=t1/t2=1.73,表明机构具有急回运动特性。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















