















































软件

产品


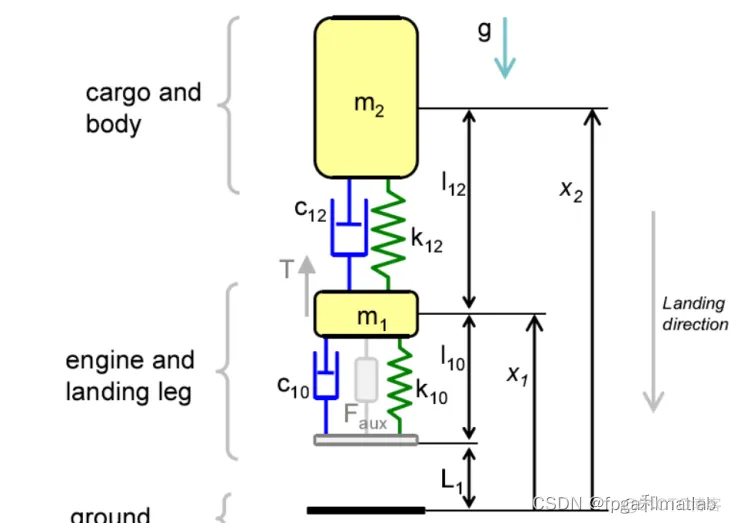
飞机减振器(也称缓冲器)是所有现代起落架所必须具备的构件,也是最重要的构件。飞机减振装置的主要作用就是用来吸收着陆和滑行时的撞击能,以使作用到机体上的载荷减小到可以接受的程度;同时须使振动很快衰减。
减震系统是多旋翼飞行器设计中非常重要的环节,好的减震系统可以很好地减轻数字滤波的负担,同时能极大地提升控制系统的性能;
下面针对整个减震系统做一个简要分析;首先,IMU+减震海绵+配重块这样的一个系统可以等效为弹簧-阻尼系统,
自适应磁流变冲击的无量纲分析与最优控制设计隔离(MRSI)支架适用于跌落引起的冲击。控制方程推导了冲击下的单自由度运动,其中磁流变能量吸收器(MREA),具有可控冲程负载和被动线性弹簧,将有效载荷质量与撞击地面的底座隔离。在碰撞事件中有效载荷经历压缩和回弹冲程。在压缩冲程期间,有效载荷随着MREA消散和弹簧储存冲击能量而下降。在回弹冲程期间,弹簧在MREA公司。宾汉数,定义为MREA屈服力与其粘性的比值力,用作控制变量。使用键进行无量纲分析参数,如可用的MREA冲程和宾汉数。第一个控制目标是为了确保有效载荷在通过充分利用MREA的可用冲程进行压缩冲程。第二个控制目的是在反弹期间完全恢复可用的MREA中风平衡点的超调,即无差拍控制。结果表明,最佳MRSI控制策略意味着选择两个不同的宾汉数,一个用于压缩冲程和回弹冲程各一个,达到了控制目标。


上述系统的伯德图如下所示:
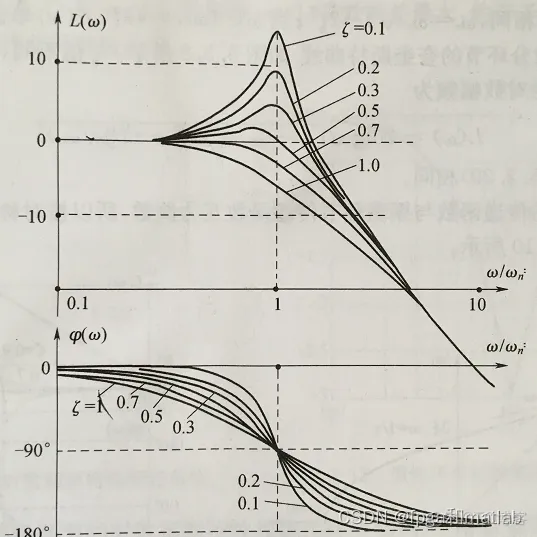
伯德图的形状告诉我们:这是一个典型的低通滤波环节;要想使减震系统对机体的震动有好的滤除作用,应该尽可能使机体的振动频率大于系统的截止频率(对二阶系统而言,截止频率与自然频率和阻尼比都有关,且与自然频率同增同减);当机体的振动频率一定的情况下,减小减震环节的自然频率是一个比较好的方法。
由于:
可以看出,增加质量m mm后,系统的自然频率ω n \omega_{n}ω n减小了,这意味着系统的截止频率降低了,对高频噪声的滤除作用提高了。这相当于物理系统对传感器的初始数据做了低通滤波,这将有效提升传感器数据的稳定性。
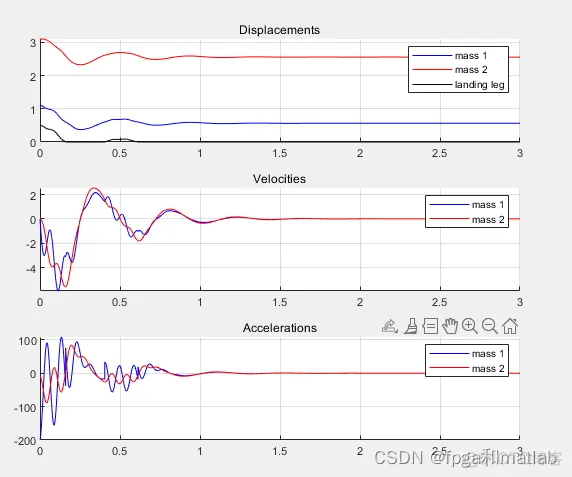
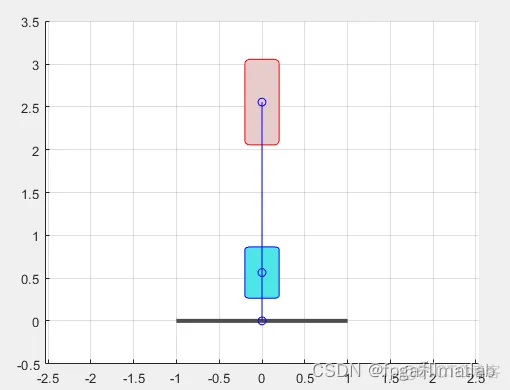
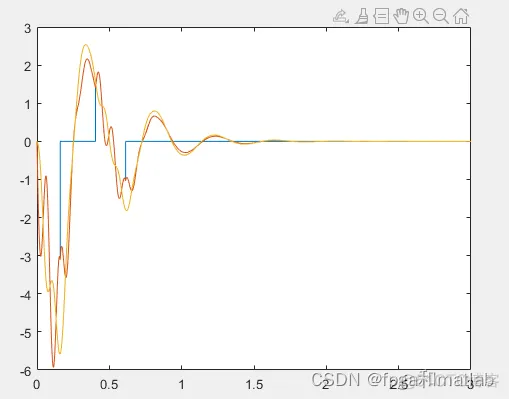
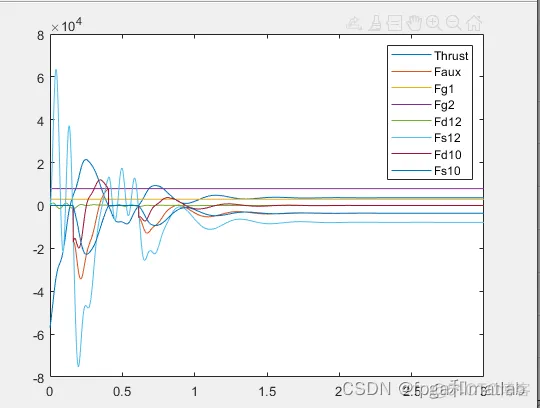
clc;clear;close all;warning off;%% Simulation script%global G;global m2;global k12;global c12;global l12;global m1;global k10;global c10;global l10;global Tend;global L1;global dxinit;% B Titurus/UoB/16032018% PROBLEM PARAMETERS% ------------------G=9.81;% ... mass 2, cargo+bodym2=800;k12=1e6;c12=5e2;l12=2.0;% ... mass 1, engine+legm1=300;k10=1e5;c10=5540;l10=0.6;% mission specTend=3; % simulation timeL1=0.5; % landing/drop altitudedxinit=0; % intial drop velocity% control flagsis_animation=true; % true/falseis_plot=true; % true/false% all parameterspars=[G,m2,k12,c12,l12,m1,k10,c10,l10,Tend,L1,dxinit,is_animation,is_plot];% SIMULATION% ----------res=batch_land_2dof_summer(pars);%res = % time: time vector% displacements: matrix with columns [xleg,x1,x2]% velocities: matrix with columns [xleg,x1,x2]% accelerations: matrix with columns [xleg,x1,x2]% forces: matrix with columns [Thrust,Faux,Fg1,Fg2,Fd12,Fs12,Fd10,Fs10]%% Thrust: is the thrust force generated in thrust_summer% Faux: is the auxiliary leg damper force generated in damper_summer%% POST-PROCESSING% ---------------figure,plot(res.time,res.displacements)figure,plot(res.time,res.velocities)figure,plot(res.time,res.accelerations)figure,plot(res.time,res.forces)legend('Thrust','Faux','Fg1','Fg2','Fd12','Fs12','Fd10','Fs10')Thrust=res.forces(:,1);Faux =res.forces(:,2);figure;subplot(211);plot(res.time,Thrust);subplot(212);plot(res.time,Faux); % end1.2.3.4.5.6.7.8.9.10.11.12.13.14.15.16.17.18.19.20.21.22.23.24.25.26.27.28.29.30.31.32.33.34.35.36.37.38.39.40.41.42.43.44.45.46.47.48.49.50.51.52.53.54.55.56.57.58.59.60.61.62.63.64.65.66.67.68.69.70.71.72.73.74.75.76.77.78.79.80.81.82.83.84.85.86.87.88.
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















