















































软件

产品


文件->导入->文件类型->Parasolid->读取文件选择文件路径->模型名称右键->模型->创建
连接->运动副->旋转副->右击主体1选择->右击主体2选择->在关节出设置坐标系
驱动->转动驱动
T+左键 平动模型
R+左键 旋转模型
Z+左键 动态缩放
F或Ctrl+F 以最大比例全面显示模型
参考了B站大佬视频
axis( [xmin xmax ymin ymax] ): 设置当前坐标轴 x轴 和 y轴的限制范围
axis equal: 设置屏幕高宽比,使得每个坐标轴的具有均匀的刻度间隔
hold on: 主要是用于添加新绘图的时候保留当前绘图
linspace: Matlab中的均分计算指令,用于产生x1,x2之间的N点行 线性 的矢量。
eg:X=linspace(5,100,20)将输出:
X =5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100
length: 函数主要是求数组元素的个数
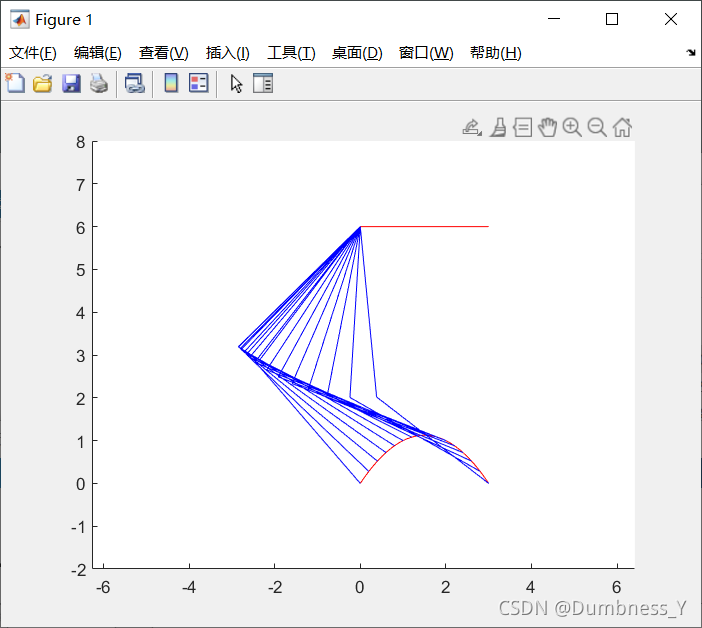
axis([-3 5 -2 8]);
axis equal;
hold on;
x=0:0.01:3;xi=x;
yi=-0.5*xi.*(xi-3);
plot(xi,yi,'color','r');%足端轨迹
yz=linspace(6,6,length(x));
plot([x,3],[yz,6],'color','r');%上端横线
%x1=0:0.2:3;%上端移动
%x3=x1;%上端移动
x1=[0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0];%上端不动
x3=0:0.2:3;%上端不动
y1=linspace(6,6,length(x1));
pp=spline(xi,yi);
y3=ppval(pp,x3);
[x2,y2]=solvepoint2(x1,y1,x3,y3);
for i=1:length(x1)
hold on;
plot([x1(i),x2(i),x3(i)],[y1(i),y2(i),y3(i)],'color','b');
pause(0.1);
end
hold on;
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















