















































软件

产品


近几年,随着科技发展,各种传感器技术和通信技术不断突破,无人机技术也发展迅速,在军事侦察、交通巡逻、景色航拍、高空电缆巡检等诸多应用领域已经发挥了重要的作用。四旋翼无人机以其具有的操作灵活、地形上限制小、携带时方便以及成本低廉等特点,更加紧密贴近了我们的日常生活,因此,对无人机进行研究具有很大的学术价值和意义。
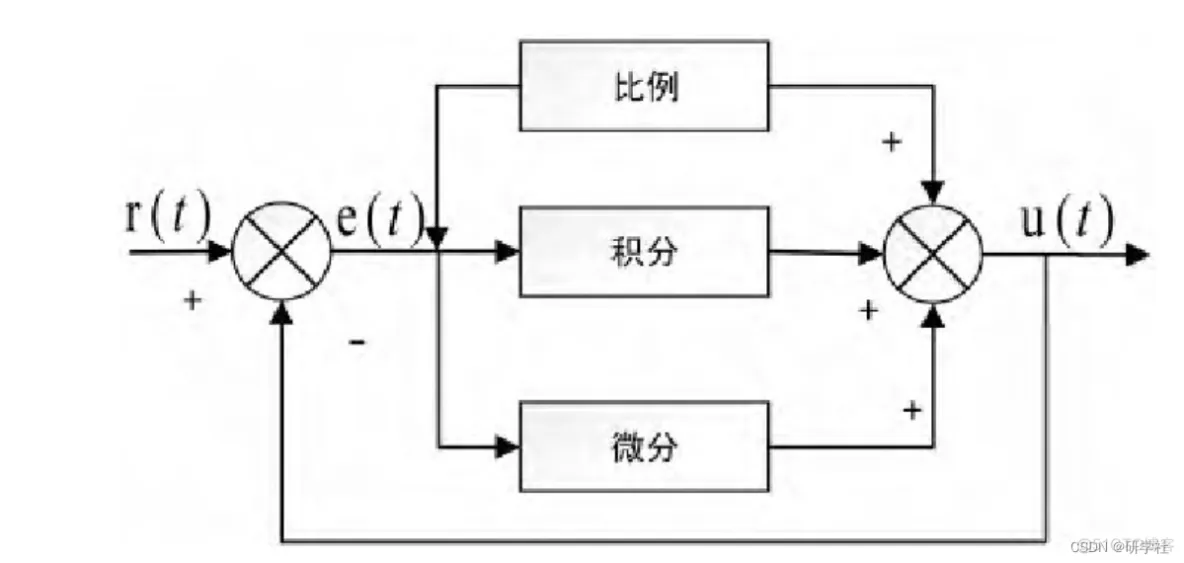
传统的PID由比例、积分、微分三部分组成,通过调节Kp、Ki、Kd的数值可以实现不同的控制效果如图所示。PID控制算法的核心是用偏差来消除偏差,该算法可以对控制系统进行有效的估计:
部分代码:
I = [Ixx 0 0;0 Iyy 0;0 0 Izz];
Jtp = 104e-6;
Ke = 6.3e-3;
Km = 6.3e-3;
L = 15e-6;
b = 54.2e-6;
l = 0.24;
g = 9.81;
n = 0.9;
N = 5.6;
h = 1e-3;
R = 0.6;
d = 1.1e-6; % drag factor
% Motor Controller Design
Kp_position = 5;
Ki_position = 0;
Kd_position = 10;
Kp_angle = 5*2;
Ki_angle = 0;
Kd_angle = 10*2;
Kp_motor = 1;
Ki_motor = 10;
Kd_motor = 0;
%w'=Apw+Bpv+Cp
Ap = -22.5;
Bp = 509;
Cp = 489;
a1 = Ap;
b1 = Bp;
c1 = 1;
d1 = 0;
sys_c_m = ss(a1,b1,c1,d1);
Gc_m = tf(sys_c_m);
sys_d_m = c2d(sys_c_m,h,'zoh');
Gd_m = tf(sys_d_m);
Cc_m = tf([Kp_motor Ki_motor],[1 0]);
sys_c_mctrl = ss(Cc_m);
sys_d_mctrl = c2d(sys_c_mctrl,h,'tustin');
Cd_m = tf(sys_d_mctrl);
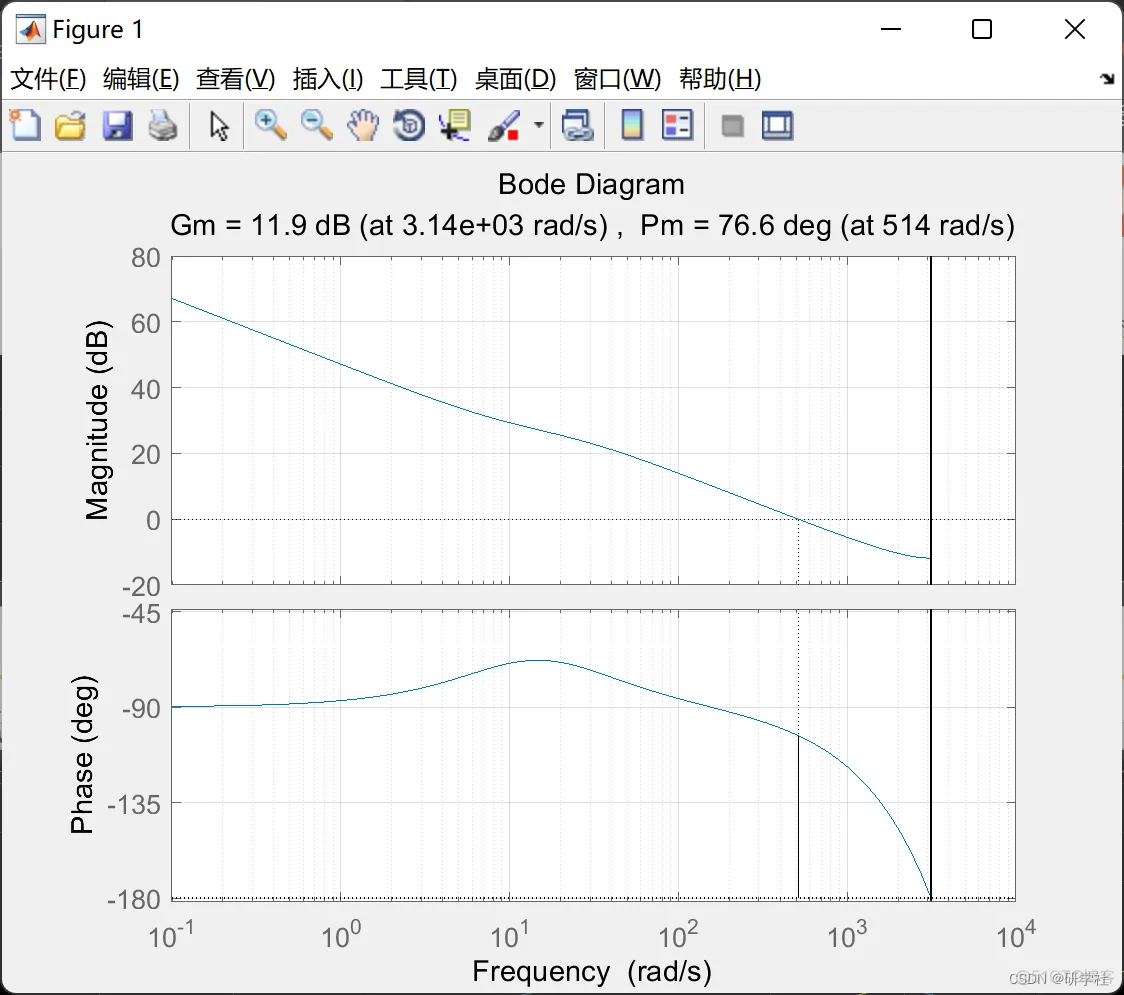
LGd_m = Gd_m*Cd_m;
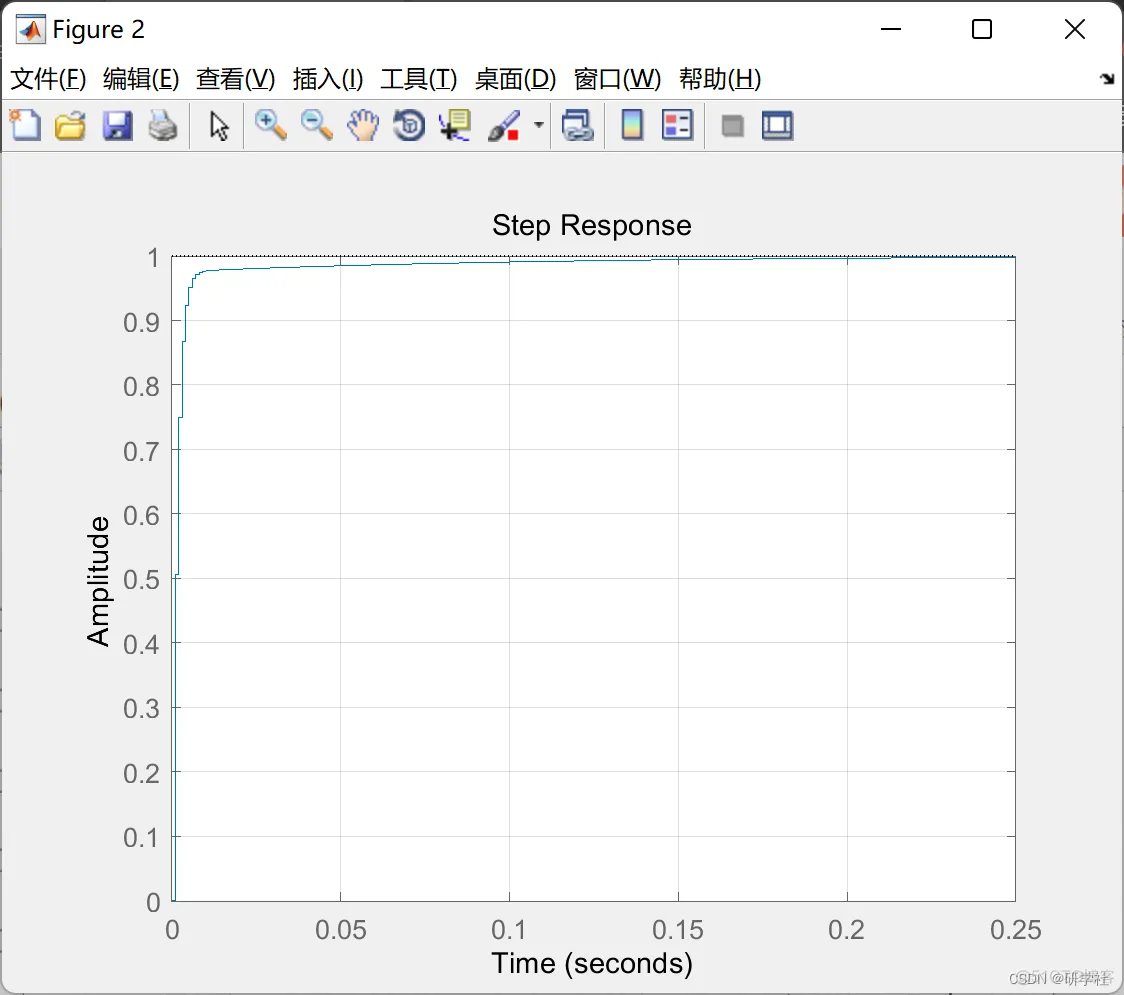
Td_m = feedback(LGd_m,1);
figure(1)
margin(LGd_m)
hold on
grid on
figure(2)
step(Td_m)
hold on
grid on
num = [1];
den = [1 0 0];
Gc_p = tf(num,den);
sys_c_p = ss(Gc_p);
sys_d_p = c2d(sys_c_p,h,'zoh');
Gd_p = tf(sys_d_p);
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















