















































软件

产品


课程目的:
随着《中国制造2025》战略的逐步推进,国产机器人的发展迎来春天,各大高校也纷纷开展了“机器人工程”“智能制造”等课程,而仿真技术在机器人的教学以及开发过程中具有不可替代的作用。
Robotics Toolbox for MATLAB(Matlab机器人工具箱)提供了一套便捷的机器人辅助开发工具,以及一本被翻译为中文的配套教材。
本课程作为机器人工具箱的入门课程,将逐步介绍工具箱的安装、各个位姿变换描述方法的区别和转换, D-H方法下的机器人建模,关节空间下的运动规划以及空间姿态插值。最后介绍“自定义6轴机械臂仿真”,实现一个机器人从建模到完成一个绘图例子的过程,并且延伸介绍了Matlab机器人工具箱在Simscape/Multibody下的仿真应用。
可先试看3分钟~
本课程的部分示例如下

绘图应用
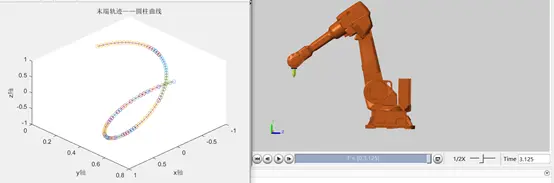
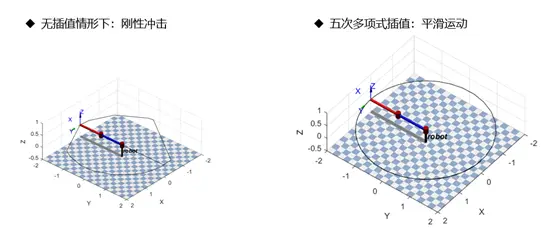
机器人仿真下的空间轨迹
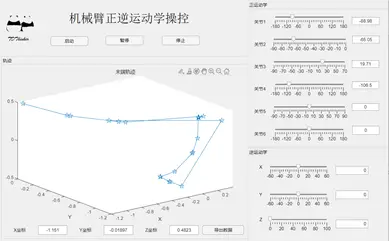
机器人手动示教
课程内容:
1.工具箱的安装及函数概览
2.位姿变换函数
3.通过D- H参数构建机械臂
4.运动规划函数
5. Puma560综合演示
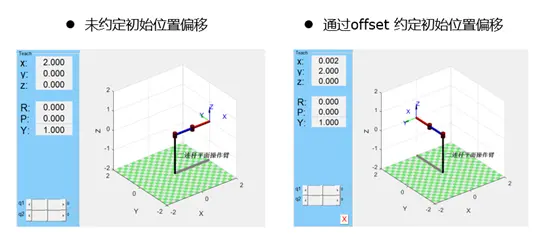
实验:自定义6轴机械臂仿真
扩展: Simscape仿真


扫一扫二维码查看更多课程内容
温馨提示:
1、 本课程为Matlab机器人工具箱的入门课程,适合具有《机器人学》背景的人群。
2、 本课程重点在于介绍Matlab机器人工具箱的应用,而不会去推导背后的数学原理。
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















