软件

产品


本文大部分内容与模态分析没多大关系,主要学习一下接触设置里的那个Asymmetric选项。
目录:
问题背景:
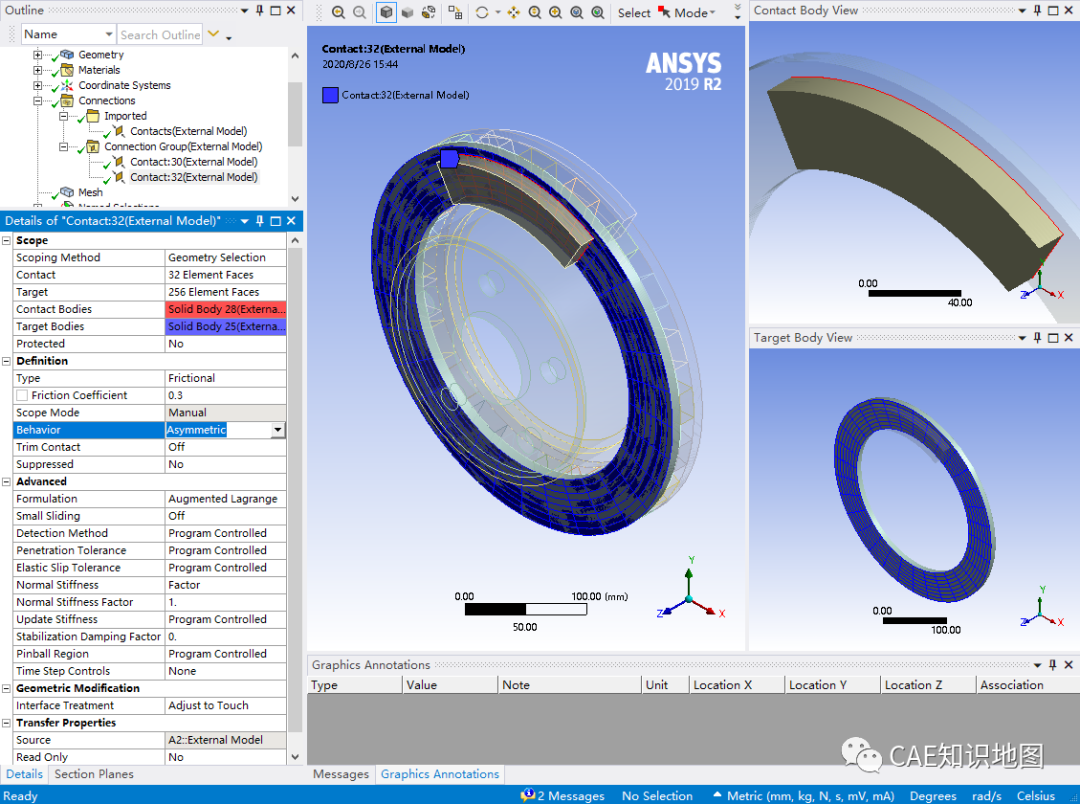
在Mechanical APDL的Showcase1里,官方给的接触设置是使用Workbench环境下的Mechanical APP来进行定义的。刹车片和刹车盘之间的接触使用了摩擦接触,摩擦系数设置为0.3,在2019 R2版本的Mechanical应用中,正确的接触设置如下图所示:
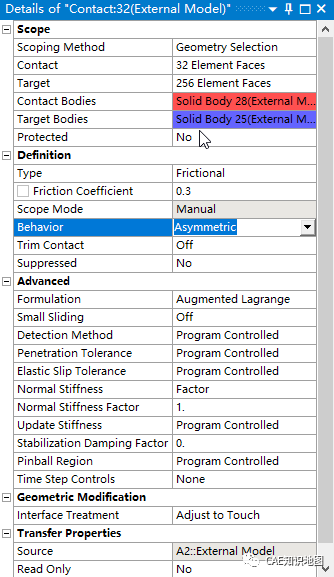
这样还看不清,再放大截一张图:
这个接触设置里面眼花缭乱这么多选项,有用的就4条:
这里面,分析刹车盘和刹车片之间的振动啸叫,为什么要用非对称的接触设置呢?我们这就来刨根问底一下。
本文参考了以下几页ANSYS帮助文档。从前到后,由浅入深顺序为:
但是……这次我就不每条都附帮助文档截图了,那没啥意思。我争取用自己的语言把它讲出来。
接触面和目标面:
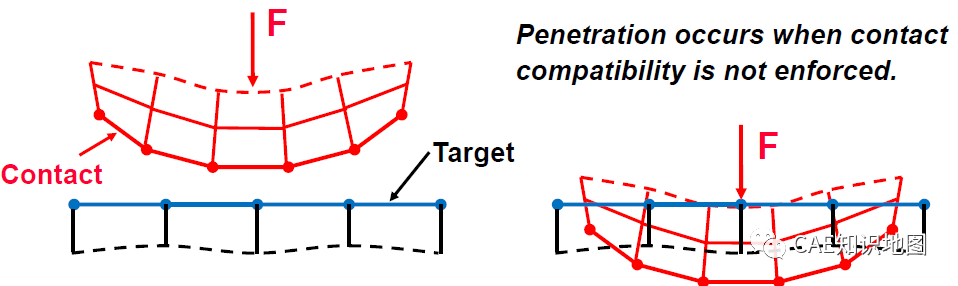
首先,除非你用的是显式动力学分析里的通用接触(Abaqus里比较常见,General Contact),否则,对于接触分析肯定要选择一个接触面(Contact)和一个目标面(Target)。其中,接触面的单元不能穿透目标面,但目标面的元素可以穿透接触面。
对称和非对称接触:
上面对于接触面和目标面的讨论实在是让人头秃,要是记不住可咋办?没关系。你可以定义一个“对称”的接触对。这样做的话,一个对称接触会自动生成两个接触面和目标面,俩面轮流坐庄,每个面都既是接触面又是目标面。这时候,CONTA174单元的KEYOPT(8)可以用来调整这两个接触对的行为,是一样的(KEYOPT(8)=1)还是各自不同的(KEYOPT(8)=0)(其实还有别的选项,可以让求解器自己决定,但这就不说了)。
当然啦,这样做也是有代价的。代价就是花更多的CPU时间嘛。
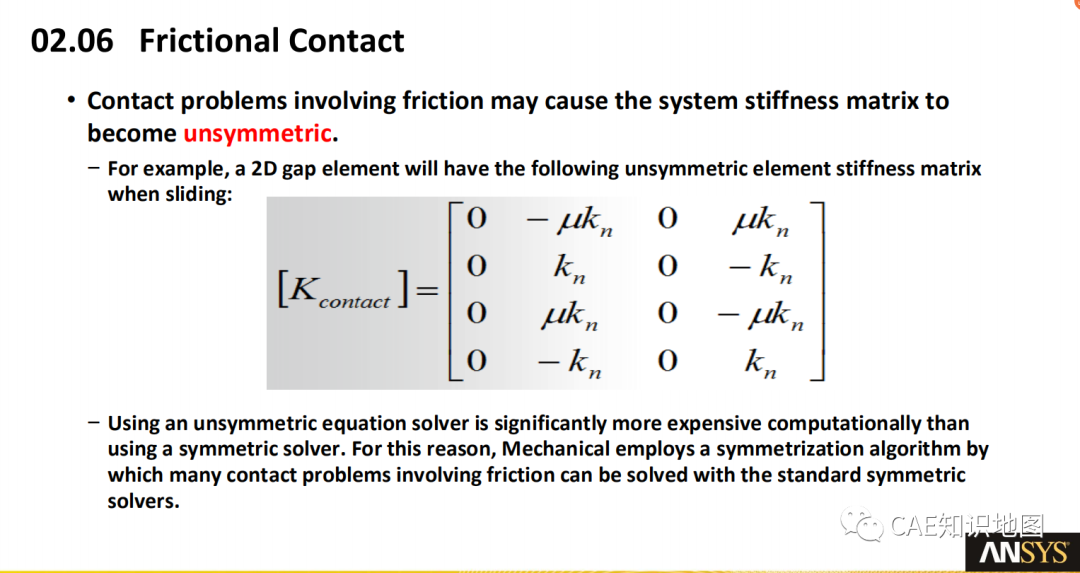
非对称刚度:
包含摩擦的接触问题,通常会使得系统的刚度阵变为非对称矩阵。
但这时候,如果使用非对称求解器,即(NROPT, UNSYM),会让CPU开销显著增加。所以有两位学者开发了一个对称化算法,被ANSYS实现在了代码里。这样许多包含非对称刚度和摩擦接触的问题就可以用对称求解器来求解了。
但是需要注意,如果摩擦应力对整个位移场有显著影响,而且摩擦应力的大小显著依赖于解,那么使用对称近似算法可能会让收敛变得困难,这种情况下就必须要使用非对称刚度阵和非对称求解器了。
强迫摩擦滑动:
APDL 的Showcase1里,最重要的一条命令就是这个CMROTATE。我终于在理论文档里见到了这条命令。
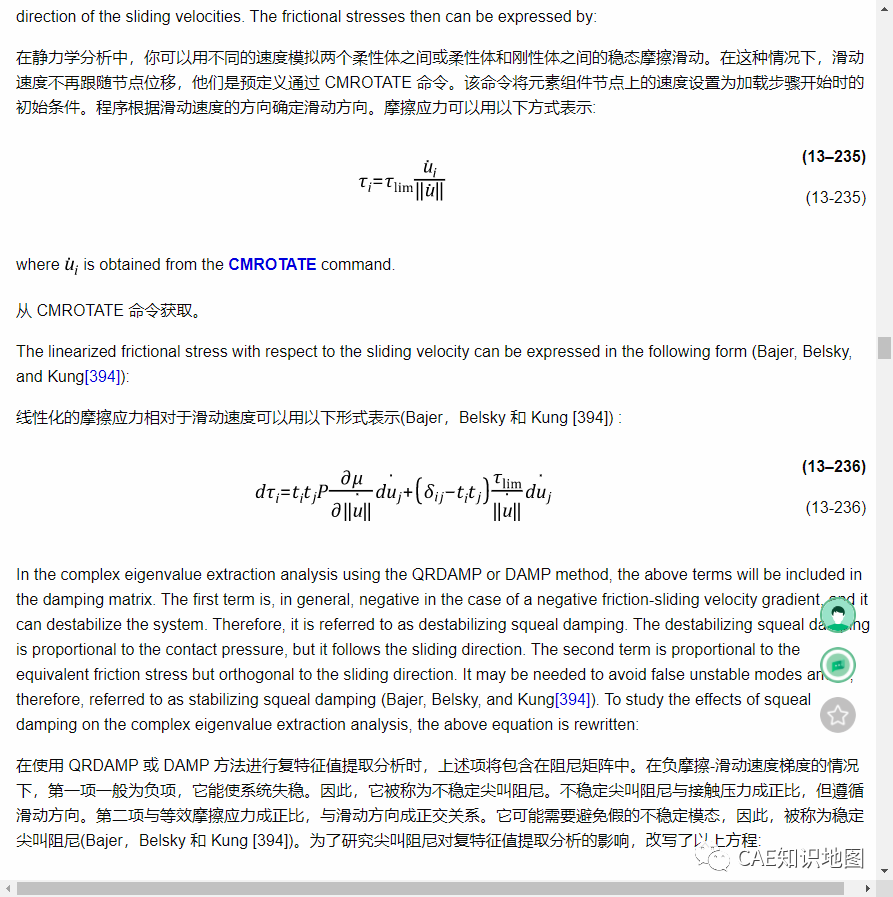
在静力学分析中,你可以模拟两个接触面之间不同速度的稳态相对滑动。这种情况下,其实不用在接触面上定义滑动速度,而是可以直接使用CMROTATE命令。
不过,话说这条命令真的没太多使用场景。就连APDL界面上都没做这个命令的GUI按钮。这条命令的帮助文档页里也写了,它的典型应用场景就是这个摩擦啸叫分析。所以……后面的内容,知道有这么个东西就行了。
下面我要开始截图了。因为文档里出现了公式,而ANSYS在这儿其实并没有写的很清楚。
总之,公式讲的大概就是,摩擦应力中有这么一项,它的存在能让这个包含摩擦的刹车盘系统在振动中失稳,发生尖叫。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020