软件

产品


01背景说明
Adams作为系统级的动力学仿真软件,对于零部件/总成的处理,通常是将其试验测得的外特性曲线引入软件中,以此代表零部件/总成的特性,比如用力-位移曲线表示螺旋弹簧、用力-速度曲线表示双筒减振器、用轮胎模型(公式)表示轮胎特性等。
但是对于某些零部件/总成,其外特性存在滞回特性,即加载-卸载得到的特性曲线不重合,这种特性大多是因为系统阻尼造成的。
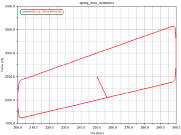
比如,对于钢板弹簧,由于其片间存在摩擦,使得刚度曲线存在滞回[2]。
图1 多片簧刚度曲线
02实现方法
零部件/总成不同,滞回曲线的机理及实现便会不同,本篇主要讨论三种情况。
2.1 考虑摩擦力实现滞回曲线
解决方法:在定义力的时候,定义摩擦力。
如粘滞摩擦:f=k*dz-c*vz。
在验证模型中,具体输入: func=10*(dy (marker_5, marker_6))-2*vz (marker_5, marker_6)
如库仑摩擦:f=k*dz-μ*abs(k*dz)*step(vr, -ε,-1,ε,1),其中step为换向函数,保证摩擦力的方向与运动方向相反。
在验证模型中具体输入:func=10*(dy (marker_5, marker_6))-0.2*abs (10*(dy (marker_5, marker_6))) *step (vr (marker_5, marker_6), -15, -1, 15, 1)

图2:验证模型
图3 力+粘滞阻尼
图4 力+库仑摩擦
上述方法可用于定义主销处摩擦力矩、管柱处摩擦力矩;也可以将两种阻尼结合使用来获得更加接近实际的滞回曲线。
用户可通过引入样条曲线(spline)的方式,定义刚度、摩擦系数等,进一步扩展函数的使用范围。
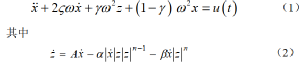
2.2 利用Bouc-Wen模型实现滞回曲线
根据参考文献[3],表达式为
引入文献中的一组参数进行创建。为方便表述,创建变量DV_A=1,DV_alpha,DV_beta,DV_n=1;建立Z_dot=DV_A*varval(y_vel)
-DV_alpha*abs(varval(y_vel))*dif(z_dot) *(abs(dif(z_dot)))**(DV_n-1)
-DV_beta*varval(y_vel)*(abs(dif(z_dot)))**(DV_n)
x为正弦位移激励,通过上述微分方程,考察z(非线性滞回力)的变化趋势。
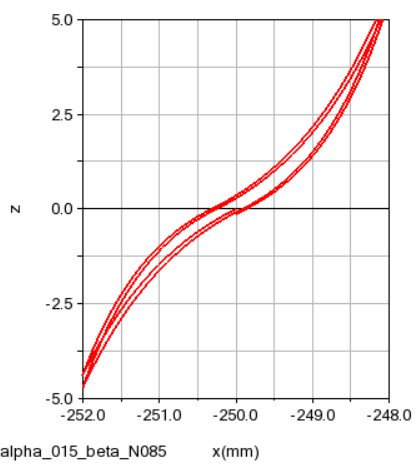
取文献中的两组参数进行计算,并与文献结果进行对比。
图5 不同参数下的z-x变化趋势
(左侧为论文截图,右侧为Adams计算结果)
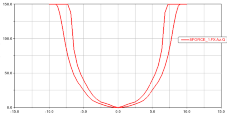
2.3 引用测试滞回曲线

图6 液压转向机压力-角度曲线
此测试曲线来源于液压转向机的输入轴扭矩-压力测试结果,常规是将其等效为中间的平均线,与实际存在差异。
解决方案是,将其作为3D样条曲线(3d spline),自变量1为转角即横坐标,自变量2用来判断是加载还是卸载,对应蓝色及黄色曲线。
Step1:统一加载及卸载的横坐标,创建3d spline;
图7 创建后的3d spline表格
Step2:引用曲线
Akispl(.torque_3dspline.Az,step(.torque_3dspline.Az*.torque_3dspline.Wz,-0.001,-1,0.001,1),Spline_1)
Az表示第一自变量,即角度;
step(Az*Wz,-0.001,-1,0.001,1)为第二变量,即角度与角速度的乘积是负的(<-0.001),则此变量取-1,表示卸载;若乘积是正的(>0.001),则此变量取1,表示加载。
效果如下图。模型文件torque_3dspline.cmd。
图8 Adams实现测试滞回曲线图
03总结
本篇中,如2.1中主销处添加摩擦、2.3中的曲线引用,侧重于实现方法。体现Adams中step函数作为换向及方向判断的用途。
Bouc-Wen作为常用的表示迟滞的模型,Adams中已有使用(如Ride插件中的general bushing就用到了此方法),本文借助此模型,体现Adams中微分方程的用法,对于模型中的参数辨识及其应用未做细致研究。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020