















































软件

产品


1 行星齿轮机构组成
行星齿轮机构如图1所示,主要由太阳轮、行星支架、行星轮和内齿轮组成。通常内齿轮固定,太阳轮和行星支架一个作为输入轴一个作为输出轴转动,行星轮在和行星支架一起转动的同时绕行星支架上的转轴自转。
2 行星齿轮运动学仿真过程
2.1 模型的简化及导入
ADAMS软件对减速器仿真时需要将一些对仿真结果影响不大的零件进行简化,例如螺栓、轴承、螺栓孔、挡圈、键等这些零件对仿真结果不会产生较大影响。为了提高仿真的效率,就有必要对这些对仿真影响不大的零件进行简化处理,提高仿真的效率。本文将建立好减速器实体模型导入ADAMS/View中后,然后对这些对仿真结果影响不大的零件进行忽略处理。
模型导入,由于UG与ADAMS之间能实现模型的直接导入,但是它们只能识别某些格式文件,因此本文在UG软件中完成装配图后直接将装配图另存为为ADAMS可读出的Parasolid格式的文件,然后在ADAMS软件界面中点击“File”(文件)一“import”(输入)命令,选择已保存好的parasolid(*.x_t)文件,然后点击“确定”命令即可,这样模型就导入到ADAMS/View 中。
2.2 修改零件的材料属性
将建立好的三维实体模型导入ADAMS中后,依次选中行星轮、太阳轮、等构件然后右击菜单,在弹出的菜单里面点击“Modify”(修改),将“Category”(种类)勾选为“MassProperties”(质量特性),将“DefineMassBy”(质量定义)勾选为“Geometry andMaterialType”(材料属性),然后依次输入行星轮等质量大小、材料属性。在设置每个构件材料属性参数时,软件系统会在每个构件上赋予一个质心坐标,由于ADAMS 软件里面不能出现中文,因此整个操作过程文件都是英文名称。
2.3 添加约束
行星齿轮机构五处旋转接触,六处齿轮接触,因此需要创建五个旋转副、六个齿轮副和一个固定副,由于齿轮副的定义中规定两个齿轮必须绕同一个构件旋转,所以在建立齿轮的旋转副时都是相对行星支架旋转,具体的各运动副如表1所示:
表1行星齿轮机构运动约束
| J1 | 内齿轮与地面间固定副 | J2 | 行星架和内齿轮旋转副 |
| J3 | 行星架与太阳轮间旋转副 | J4、J5、J6 | 行星架和三个行星轮之间旋转副 |
| G1、G2、G3 | J2和J4、J5、J6间齿轮副 | G4、G5、G6 | J3和J4、J5、J6间齿轮副 |
旋转副和固定副的建立,旋转副的建立需要选择两个构件、一个作用点和一个作用方向。齿轮副的建立,齿轮副属于复合运动副,是两个运动副之间的运动副,在建立时除了要选择两个运动副之外,还需要选择啮合点,啮合点必须是建立在两个旋转副公共旋转构件上的Marker点,Marker点的Z轴方向必须和啮合方向一致。啮合点位置和坐标如表所示。
表2啮合点位置及方向
| 啮合点 | 方位坐标 | 位置坐标 | ||
| 啮合点1 | 0.0,90.0,90.0 | 0.0,0.0,60.0 | ||
| 啮合点2 | 180.0,162.0,90.0 | 0.0,-57.0,-18.5 | ||
| 啮合点3 | 0.0,144.0,270.0 | 0.0,48.5,-35.3 | ||
| 啮合点4 | 0.0,90.0,90.0 | 0.0,0.0,100.0 | ||
| 啮合点5 | 180.0,162.0,90.0 | 0.0.-95.0,-30.8 | ||
| 啮合点6 | 0.0,144.0,270.0 | 0.0,80.8,-58.8 |
添加完运动约束后行星齿轮机构约束简图如图所示
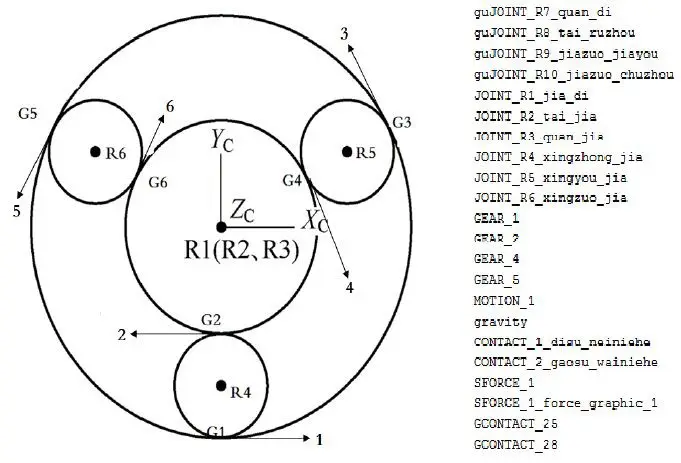
图2.行星减速器简化约束图
2.5 添加驱动和负载扭矩
将J3设置为主动驱动,给予J3恒定的角速度3000°/s,设置的参数如图3所示。

图3.添加驱动对话框
2.6 运动学仿真
前面的参数设置完成后,最后只需将仿真时间设置为1s,步数设置为1000步,启动求解器程序,即可得到仿真图形。
2.7 仿真结果
1)传动装置角速度仿真
经过前面ADMS虚拟样机建立后,启动仿真求解程序后,经过一段时间运算后,求解出本文需要仿真的角速度曲线。
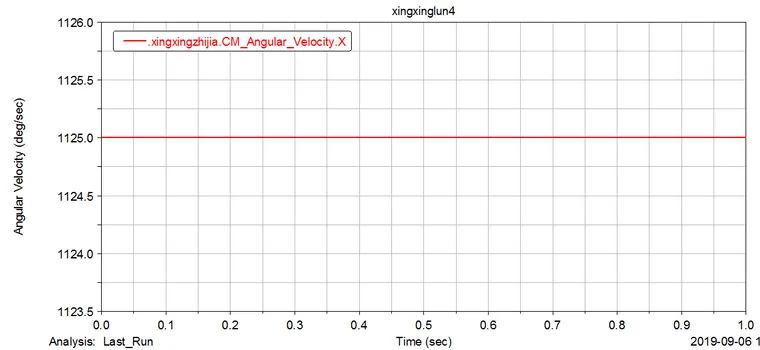
a.行星支架运动角速度
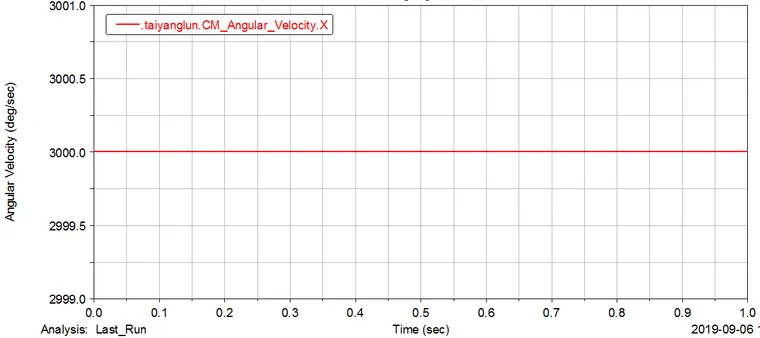
b.太阳轮运动角速度
图4.输入轴和输出轴角速度
2)结果对比
行星齿轮减速机构太阳轮和行星支架理论上的减速比为:
其中为传动比
为行星轮齿数,40
为太阳轮齿数,120
计算得到理论传动比为2.67
由太阳轮和行星支架角速度曲线计算得到仿真减速比为,可以看出在行星齿轮机构运动学仿真中,仿真结果和理论计算结果高度一致。
3. 动力学仿真
3.1 模型修改
对于行星齿轮机构运动学仿真和动力学仿真之间的区别在于齿轮间相互关系的建立,在运动学仿真中齿轮间靠齿轮副连接,相互之间的运动与理论值高度吻合。动力学仿真时齿轮间采用接触的方式相互连接,在动力学仿真中会因为齿轮间接触刚度和间隙,而使仿真结果和理论计算值产生一定的出入,但是更加真实。
在运动学仿真模型的基础上,首先将齿轮副G1~G6删除,然后建立三个行星轮和太阳轮、内齿轮之间的接触,C1~C6。其中接触刚度的可以参考公式2),阻尼系数可以设置成接触刚度的0.1%~1%。
施加扭矩载荷,对行星轮架施加与运动方向相反的负载扭矩,扭矩大小为100Nm,如图所示。
3.2 动力学仿真
设置仿真时间为1s,仿真步数为1000,进行仿真分析,分析完成后查看仿真结果。
3.3 运动角速度分析
输入轴太阳轮和输出轴行星支架的角速度曲线如图所示,由图可以看出输出轴行星支架转速在不断波动并有大量毛刺,这是由于齿轮间的间隙、刚度和接触非线性引起的。
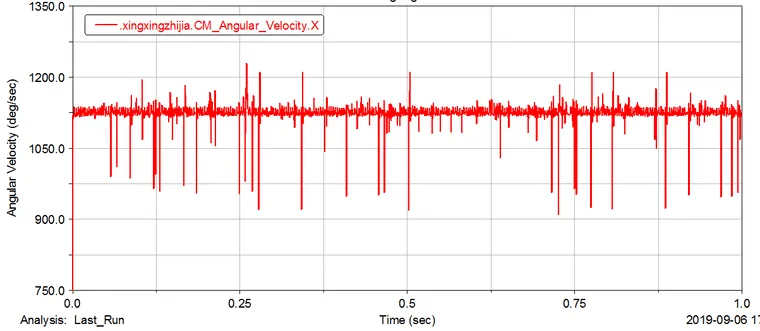
图5.行星支架角速度
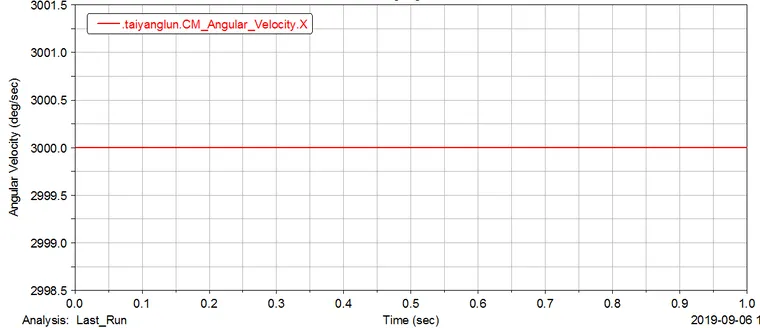
图6.太阳轮角速度
3.4 接触力分析
行星轮和太阳轮、内齿轮的接触力随时间变化如图所示。由图可以看出接触力呈周期性变化,变化频率为旋转频率的整数倍。
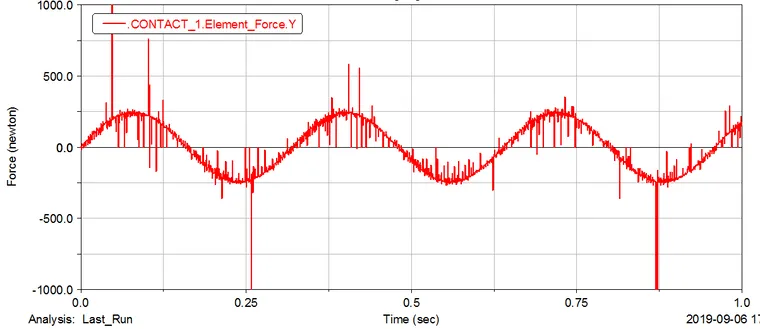
图7行星轮和内齿轮Y方向接触力
在ADAMS中对接触力做傅里叶变换,得到频域内的接触力变化曲线,由图可以看出接触力的最大值出现在与旋转频率相同。
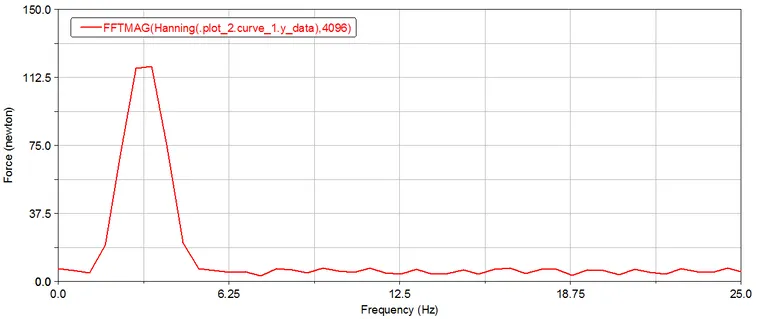
图8行星轮和内齿轮Y方向接触力频域图
4 刚柔耦合分析
4.1 目的
进行刚柔耦合分析相对于刚体分析更加接近实际情况,得到的传动比更接近实际传动比。进行刚柔耦合分析可以得到柔性构件的应力分布和应力随时间的变化,这些数据可以作为校核柔性构件强度的依据,同时也可以作为疲劳分析的原始数据。
4.2 柔性体生成
柔性体的生成主要有两种方法,一种是靠ADAMS自带软件生成,一种方法是靠有限元软件生成,其中ANASYS、PATRAN和UG都可以生成ADAMS可以读取的柔性体文件。本文采用UG生成柔性体文件。
4.3 柔性体替换
在已有的动力学仿真模型的基础上,采用柔性体替换刚体的命令,替换其中的一个行星轮为柔性体。具体操作为在Build中选择Filexible Bodies,然后再选择Rigid to Filex,弹出如图9所示对话框,对其中参数进行设置,然后点击OK,即可完成柔性体替换刚体的操作。
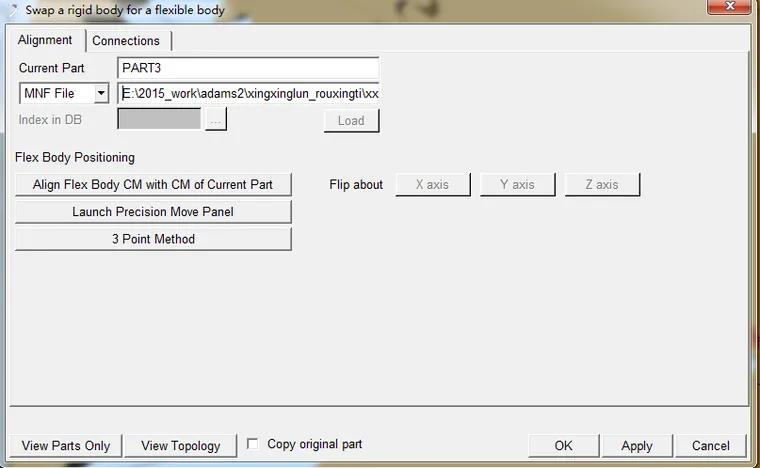
图9.柔性体替换刚体窗口
4.4 刚柔耦合仿真
设置仿真时间为1s,仿真步长为1000步进行仿真分析。
4.5 结果查看
这里主要关注柔性体的应力应变信息,在后处理窗口菜单栏中选择Durability中的Hot Spots Table,弹出如图10所示对话框,设置相关参数,按图示所示进行参数设置,然后点击Report,可以得到运行过程中出现的最大应力和最大应力出现的时刻。

图10.最大应力查询
单元应力随时间变化信息的导出,在后处理窗口中的菜单栏中选择Durability中的Nodal Plots,出现如图11所示对话框,对其中的参数进行设置,然后点击OK,即可生成相应单元的应力随时间变化。然后选择File中的Export,之后再选择Numeric Data弹出如图12所示对话框,对对话框中的参数进行相应的设置,然后点击OK即可将应力随时间变化的数据导出,导出的文件可以用文本文件打开。输出的应力随时间变化数据可以作为疲劳分析的原始数据。
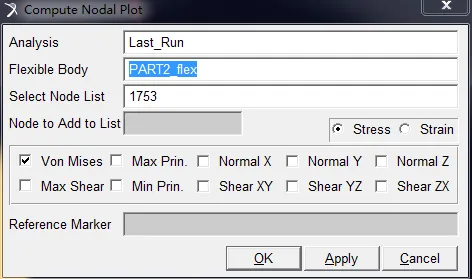
图11.单元应力生成
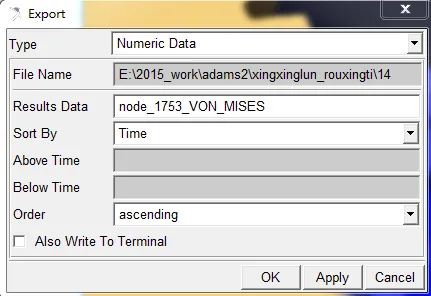
图12.单元应力导出
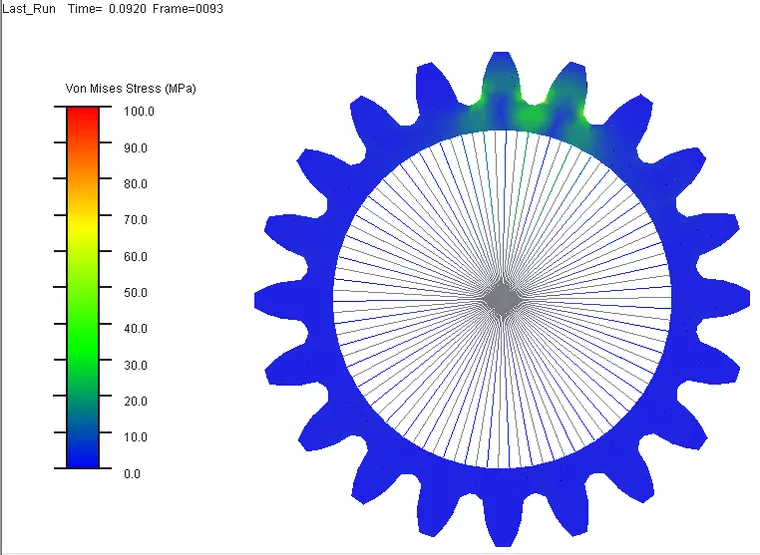
应力分布云图,可以再后处理模块中显示任意时刻的应力云图,直观的显示应力的分布。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















