















































软件

产品


在开始之前,先简单介绍一下两个软件。对于做机器人的同学来说,V-REP、Gazebo啥的肯定不陌生,但是ADAMS见得就不多了。
意味着: (1)使用ADAMS精细、真实的虚拟样机模型为平台; (2)使用Simulink丰富、集成的控制模块进行控制器的搭建。 大概这么个效果 ADAMS&Simulink联合仿真效果
我们用一个简单的四旋翼无人机例程来进行讲解:
首先,使用Solidworks画一个无人机,如果你没有现成的模型,画图时需要遵循以下原则:
固定连接不动、且材料相同的部件绘制为一个零件;相同零件独立命名(即四个螺旋桨分别命名为rotor1、rotor2…等);英文命名。如果你已经有一个自己的模型,希望进行简化并导入,需要遵循:
固定连接不动、且材料相同的部件合并成为一个零件;相同零件独立命名(即四个螺旋桨分别命名为rotor1、rotor2…等);英文命名。这里我们画一个很抽象的四旋翼飞行器,如图:
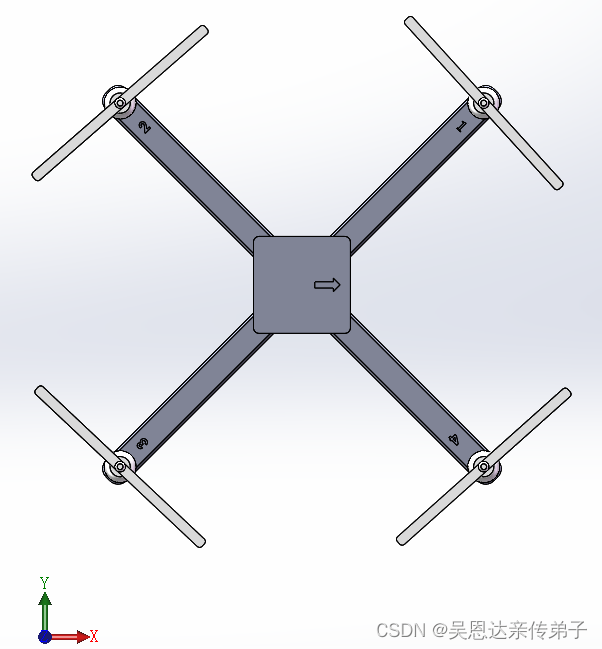
这是个抽象的F450四旋翼无人机,x为正方向,电机依次编号为1、2、3、4。
共有五个零件组成装配体:
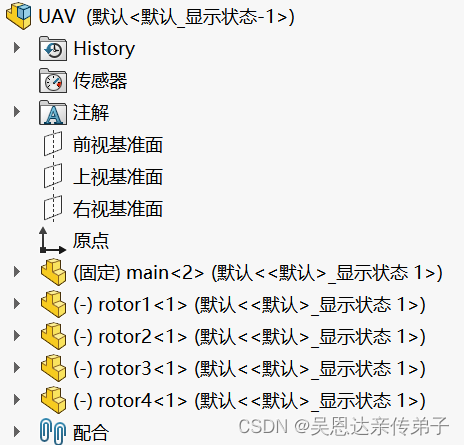

导出为x_t格式的文件:

全英文路径!全英文路径!全英文路径!全英文命名!全英文命名!全英文命名!
视角的操作,比较魔幻且不人性
本文介绍了ADAMS与Simulink联合仿真的前置准备工作,包括Solidworks画图的注意事项与原则,以及如何导出x_t文件,如何将x_t文件导入ADAMS中。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















