软件

产品


案例简介
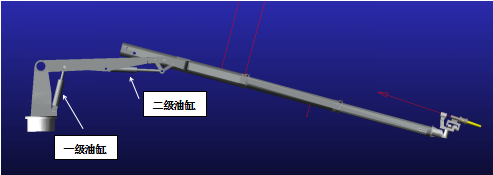
本案例源自某公司喷浆机产品在工程使用中出现机械臂裂缝甚至断裂的真实情况。该喷浆机机械臂在频繁的启停时,后臂处出现裂口后断裂,可能造成严重安全事故。为分析机械臂断裂的原因,并对其结构强度进行进一步的改进,本案列运用Adams和Ansys对机械臂的运动学与动力学模型和后臂有限元模型进行建模分析。
基于Adams的运动学与动力学建模与仿真
在对喷浆机进行有限元强度分析前,需要对喷浆机的工况进行综合考虑,分析出后臂最危险的工况,在对其进行其加载分析。为了分析喷浆机在不同姿态工作时的受力情况,利用动力学分析仿真软件Adams对喷浆机机械臂系统进行仿真。
1.模型建立
从Solidworks建立好的机械臂装配CAD模型导入Adams中,定义各构件质量信息、各运动副的约束。得到Adams运动学与动力学模型。
Adams运动学与动力学模型
2.定义外作用力
分析喷浆头受力可知,喷浆输送的流量为最大30方/小时,1方混凝土按2400kg来算;喷浆口直径55mm;空压机的流量为11方/小时。经过计算,在喷浆头处添加喷浆时软管和软管内的混凝土对喷浆头的作用力约2000N。此外,在俯仰臂一侧还支撑一段输送混凝土的管道,作用力约1500N。
3.根据工况设置驱动
在液压油缸处运动副上定义驱动,以模拟工程使用中的实际工况。
仿真工况描述:机械臂从初始位置向上扬起到仰角最大位置,然后向下运动到初始位置。(初始位置为大臂和伸缩臂均水平,伸缩臂缩到最短位置)。
通过测量后臂各个铰点运动副的受力,可得其在工况运动过程中的x、y、z方向受力情况(如下图)。通过分析可知,10s时后臂处于受力最大的姿态。

后臂各铰点x、y、z方向受力情况
基于Ansys的后臂有限元模型建模及仿真
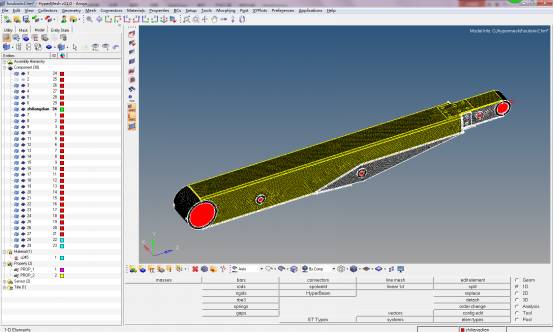
1.基于HyperMesh有限元模型前处理
为了获得精度较高的网格,也方便定义后臂材料属性。本案例中使用HyperMesh对后臂几何体进行网格划分。
HyperMesh网格模型
为了方便在对应的铰点上施加上面得到的Adams仿真分析得到的受力结果,在后臂的铰座表面处均建立了点网格(MASS21),并与铰座表面节点建立起刚性连接。定义点网格质量近似为0,这样在点网格施加的力可以等效的传递到铰座表面各节点处。
HyperMesh中建立的刚性连接
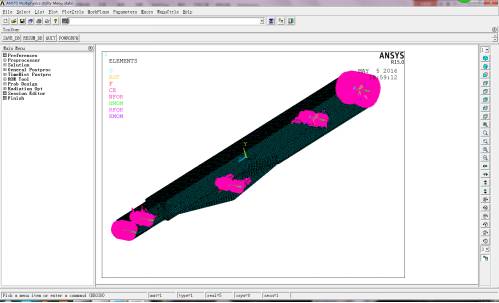
2.Ansys有限元模型
将HyperMesh建立的网格文件输出为cdb格式并导入到Ansys中,在油缸铰座位置设置约束,并在铰点处分别添加x、y、z方向的作用力。(注意:此时坐标系需要与Adams中是否保持一致)
Ansys 仿真模型
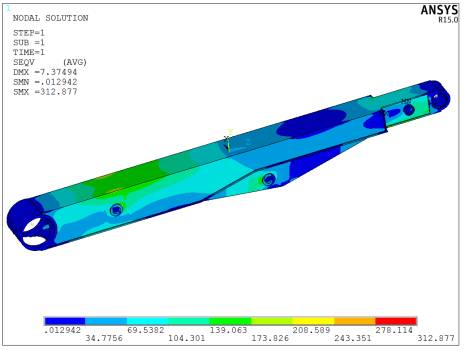
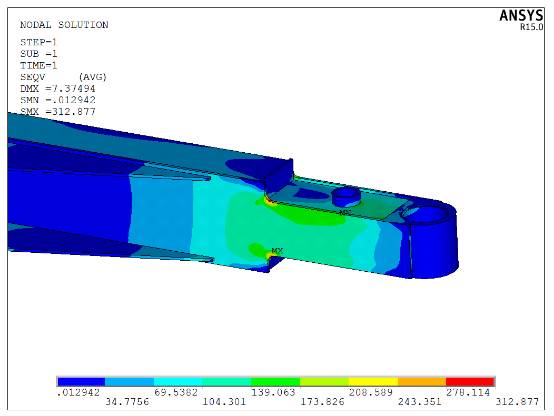
进行上述设置后,进行惯性释放(Inertia Relif)后进行求解,得到后臂应力仿真分析结果。
后臂应力仿真分析结果
后臂断裂位置与有限元结果对比
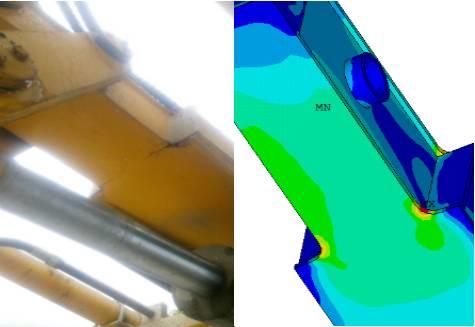
通过对比该公司现场问题断臂的位置和有限元仿真结果,后臂出现裂缝和断开位置均位于后臂的T型角处,与仿真应力最大位置一致。
后臂断裂位置与有限元结果对比
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020