















































软件

产品


摘 要:
为避免打印机工作过程中出现运动突变和冲击,影响打印精度等问题,以Delta打印机为研究对象,完成3D打印机的模型绘制,分析其运动学求解过程,建立打印机的运动学方程,并借助Matlab和Adams软件完成对运动学方程的验证.借助Hypermesh对关键部件柔性化处理,完成刚柔耦合仿真验证,对特定工况下传动误差、位移、速度和加速度进行分析,验证了模型设计的合理性.
关键词:Delta打印机;运动学方程;Matlab;Adams;Hypermesh;传动误差
相对其他成型工艺,3D打印机能够完成更复杂的成型工艺,且成型周期短、效率高,从而得到广泛应用.目前市场上主要存在两种形式的打印机,即Delta打印机和Reprap打印机,前者构型较为复杂,其有效工作空间往往会因为结构而受到一定的限制,但是其体积小、精度高、承载能力强,因此在成型较为复杂的零件时也具备更多的优势[1G3].
随着时代的不断发展,3D打印机在实际工作中存在的问题也逐渐显现出来,因此人们对打印机的研究也在逐步深入.张俊等[4]对陶瓷打印机喷头及结构设计进行了详细分析.曾达幸等[5]对3GCUR解耦并联3D打印机进行了深入研究,并通过遗传算法对机构进行相应优化,提高3D打印机的定位;李小汝等[6]通过对3GDOF冗余并联式机构学研究,也为3D打印机的进一步发展奠定了基础.本文针对目前市场上的主流Delta打印机进行了研究与分析,并结合模型的实际尺寸建立了打印机的数学模型,结合Adams和HyGpermensh等软件完成对模型的验证以及传动的误差分析.
1 Delta打印机工作概述
本文主要针对Delta运动模型进行分析,因此对三维模型进行了适当简化,结构主要由静平台、转臂、摆臂以及动平台构成,其中静平台主要安装转臂的驱动电机以驱动转臂完成复杂的打印动作;转臂及摆臂主要辅助动平台能够多自由度完成相应的打印动作,并对动平台起到主要支撑作用以满足其工作强度要求.动平台主要作为打印喷嘴的安装平台,Delta打印机结构如图1所示.

2 打印机位姿求解
为便于模型研究及运动学方程建立,将上述模型简化为几何关系表达式,因为动平台运动方式受从动臂联合约束作用的影响,所以将其转嫁到单侧主动臂和从动臂各关节的主动驱动.针对3臂综合的运动效果可简化为单臂运动方式,具体结构如图2(a)所示.其数学模型如图2(b)和(c)所示,其中R为静平台半径,即图2(a)中的a1,r为动平台半径.
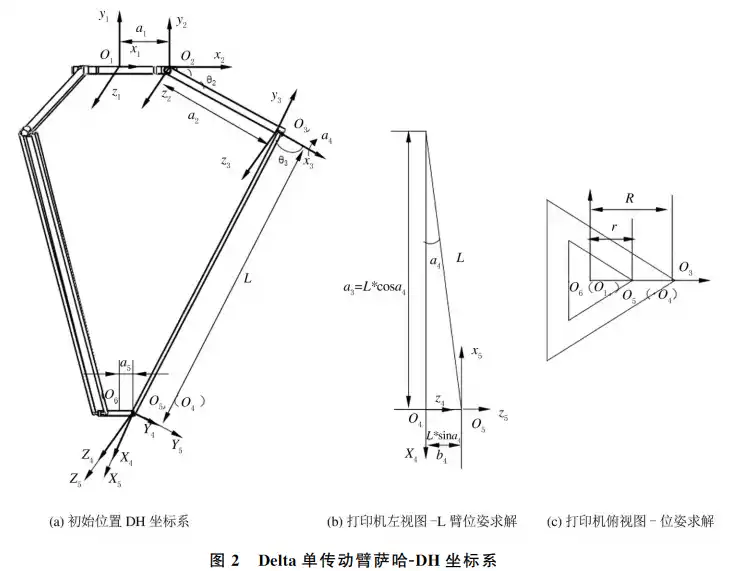
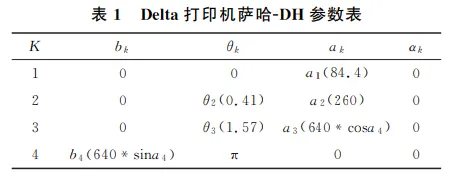
Delta打印机动平台在工作过程中受到3个主动臂和从动臂的影响,其动平台具备平动运动的特点,因此可将其数学模型再次简化为单主动臂、从动臂及平动平台.用萨哈GDH参数法建立其运动学方程,由图2可得3D打印机的萨哈GDH参数如表1所列.
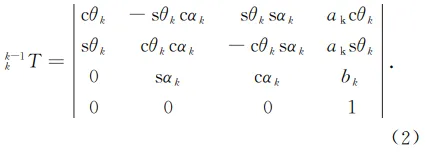
由坐标变换关系可知,相邻量坐标之间可通过4个齐次坐标变换进行描述,关系表达式为:

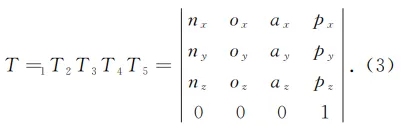
通过计算最终可得其表达式为:
综合上式得出运动方程为:
其中:k表示坐标系的编号,c和s分别代表cos和sin的缩写;Ttz为坐标系k沿Zk轴平移距离bk,使Xk和Xk+1轴相交;Trz为坐标系k的Xk轴绕Zk轴旋转θk,使Xk轴和Xk+1轴共线;Ttx为坐标系k沿Xk+1轴平移距离ak,使Ok和Ok+1点重合;Trx为坐标系k的Zk轴绕Xk+1轴旋转角度ak,使得Zk轴和Zk+1轴重合[8].
将初始值a1(84.4),a2(260),a3(640cosa4),b4(640sina4),a5(33.75)带入上式中,经过Matlab计算可得坐标点X5、Y5、Z5相对坐标系原点的坐标的位置为:Px=260cosθ2-640cosa4sinθ2sinθ3+640cosθ2cosθ3cosa4+422/5,Py=260sinθ2+640cosθ2cosa4sinθ3+640cosθ3cosa4sinθ2,Pz=640sina4.
从而可得动平台的质心相对静平台质心的位置为:x=260cosθ2-640cosa4sinθ2sinθ3+640cosθ2cosθ3cosa4+422/5-33.75,y=260sinθ2+640cosθ2cosa4sinθ3+640cosθ3cosa4sinθ2,z=640sina4.
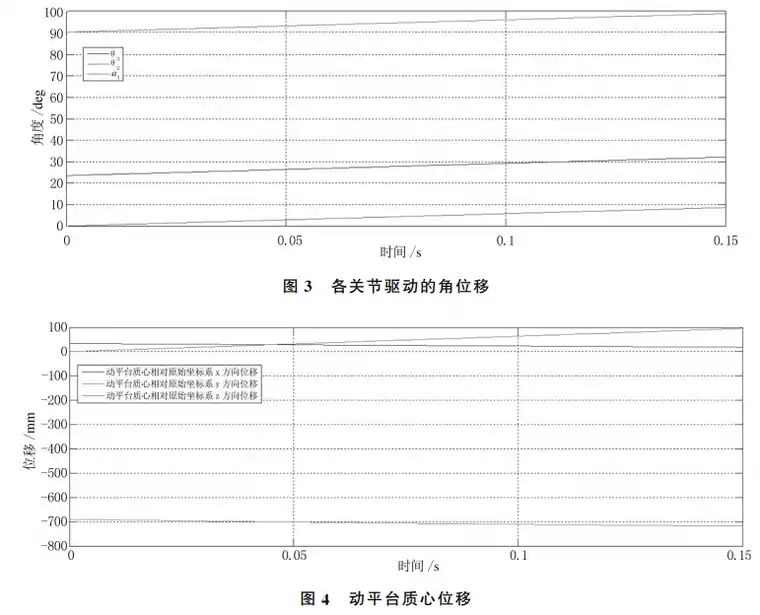
为保证模型从初始位置进行运动,将仿真时各关节的角位移设置如下:θ2=time+0.41;θ3=time+1.57;a4=time.从而可得其驱动角位移曲线如图3所示.将各转角位移带入运动学方程,利用Matlab求解可得其动平台末端质心的位移曲线如图4所示.
3 Adams和Hypermesh刚柔耦合运动学分析
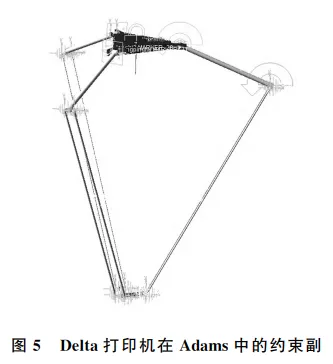
将三维模型导入到Adams中并按照其运动关系在各关节加入对应的约束副,并对其上述运动参数进行验证.Delta打印机在Adams中的约束副如图5所示.
由于模型中针对θ2、θ3、a4的初始角度分别为0.41rad、1.57rad、0rad,因此为保证仿真时的各转角位移保持一致.这里分别给予θ2、θ3、a4转角的驱动值分别设置为:θ2=time;θ3=time;a4=time.
为保证和上述运动时间一致,这里将仿真时间设置为为0.15s,步数设置为500步,仿真结束后,利用Adams/Processor功能调出动平台的质心坐标如图6所示.
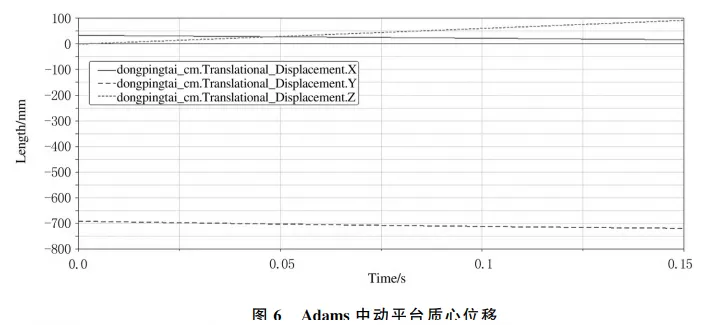
从图6可以看出,其Adams仿真结果和理论结果相符,从而验证了本文模型建立的合理性.可进一步的得到动平台质心的速度及加速度结果如图7和图8所示.
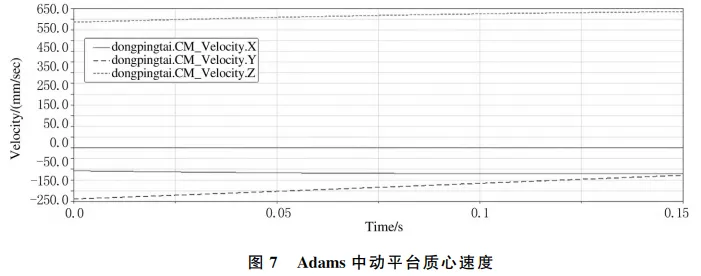
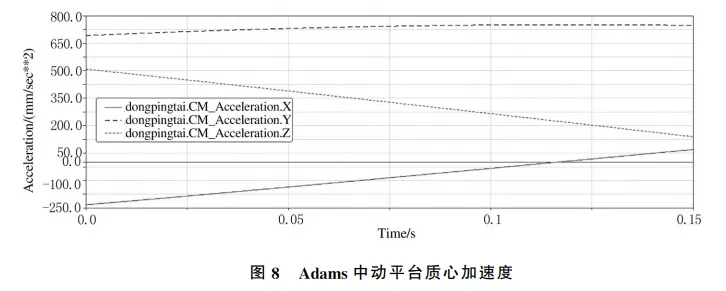
从图7、图8中可以看出,动平台在运动过程中其位移、速度、加速度曲线变化相对较为平顺,没有出现突变等不良情况,从而也进一步的验证了模型在运行过程中的稳定性.
由于打印机在工作过程中,在其动臂承受一定的负载的情况下,往往导致其动平台的质心会偏移其理论位置,从而导致其打印精度受到一定的影响,导致零部件精度误差较大[9G10].其Delta并联机构3D打印机具有一定的承载能力,其打印精度往往相对其理论设定打印位移偏差较小,这里主要借助Hypermesh软件对关键承载部件的主动臂和从动臂进行柔性化处理.划分结果如图9所示,使其生成Adams软件可识别的mnf网格文件,并将其导入到仿真模型中进行验证.

将上述柔性体导入Adams中,再次进行仿真可得,其动平台的末端质心位移和刚性体末端质心位移曲线如图10所示.

由图10可知,在主动臂和从动臂进行柔性处理的情况下,其仿真结果和刚性体仿真结果基本重合,在误差允许的范围内,进一步验证了设计的合理性.
4 结语
本文对Delta打印机的工作原理和结构进行了说明,并结合其工作原理,完后了三维模型的绘制.结合其结构特点,利用萨哈GDH坐标法,建立其运动学方程,同时借助Matlab和Adams软件验证其数学模型的合理性,利用Hypermesh对Delta打印机的主动臂和从动臂进行了柔性化处理,并将其导入到Adams中进行特定工况下DelGta打印机的刚柔耦合分析,结合仿真实验,对理想刚性体和柔性体情况下的动平台质心位移传动误差进行了分析,验证了模型设计的合理性.
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















