软件

产品


因为采用多刚体系统计算会产生卡死现象,所以对剪式稳定架进行柔性化处理,从而得到刚柔耦合的多体系统,然后进行动力学仿真分析,预测剪式稳定架的受力情况,为产品设计和优化提供参考。
0 引言
1996年,ADAMS推出ADAMS Flex模块,实现了同时包含刚体和柔体的机构动力学分析。ADAMS中的柔性体分为离散式和模态式2种:离散式柔性体是把一个刚体构件离散为几个小刚性构件,小刚体构件之间通过柔性梁连接,离散式柔性体的变形是柔性梁的变形,并不是小刚体构件的变形,这种柔性体可以模拟物体的非线性变形,但只适用于简单结构;模态式柔性体是由ADAMS Flex模块或外部有限元软件生成,能根据构件的实际结构进行复杂建模,这种柔性体采用的是模态叠加法来模拟物体变形,故仅适用于线性结构的受力分析。
1 刚柔耦合基本理论
在外部载荷作用下,物体一定会发生弹性变形,所以,多体系统都可以等效认为是一个多柔性系统。在这种情况下,如果所研究的部件刚度大并且不考虑部件的应力-应变响应,则可以将该部件视为刚体。但是当所研究部件的弹性变形对系统的影响较大,或者在外部载荷作用下部件的变形较为明显时,则必须考虑部件的弹性系数。此时,就需要把所研究部件进行柔性化处理,以使多体系统更接近实际情况。
本文进行刚柔耦合仿真时采用了RecurDyn中提供的有限元柔性体建模。有限元柔性体实现了有限元技术与多体动力学的有机结合,克服了模态柔性体对接触问题建模不准确,柔性体变形后模态需要及时更新的缺点,采用节点之间的相对位移和旋转作为节点坐标来描述结构的变形,具有较高的计算精度。其理论数学建模原理如下:在空间梁单元结构中,取任意两单元i-1和i,坐标系O-XYZ为总体惯性坐标系;x(i-1)iy(i-1)iz(i-1)i为固结在节点i上关于节点i-1的随体坐标系。从而得到柔性体的动力学方程为:
式中:q为柔性体的广义坐标矢量;B为系统节点矩阵;M为柔性体的质量矩阵;Y为机构所有广义坐标的2阶导数所组成的向量;Φ为约束矩阵;λ为拉格朗日乘子;Q为力矢量和。
2 基于Adams刚柔耦合仿真分析及应用
2.1 仿真模型运动函数定义
剪式框架初始位置为全伸展姿态。在上升运动时,首先在1s时间内框架由静止加速至10m/min,然后匀速运动保持26s,最后在1s时间内由10m/min减速至0,此时剪式框架总行程为4.5m,运行结束为全收缩姿态;在下降运动时,先在1s时间内框架由静止反向加速至10m/min,然后保持匀速运动26s,最后在1s时间内由10m/min减速至0,此时剪式框架又回到全伸展姿态。整个升降过程运行总时间为56s。描述升降过程采用Adams软件函数库中if和step函数:
if(time-28:(step(time,0,0,1,166.67)+step(time,1,0,27,0)+step(time,27,0,28,-166.67)),0,(step(time,28,0,29,-166.67)+step(time,29,0,55,0)+step(time,55,0,56,166.67)))。
2.2 仿真分析和结果
根据试验数据,剪式框架由全伸展状态运行至全收缩状态产生的最大偏移为10mm。设定车头方向为前、副驾驶侧为左,考虑框架上升速度为前快后慢、前慢后快和左快右慢2种工况,对其进行动力学仿真分析。
2.2.1 前快后慢工况
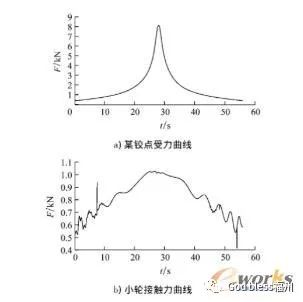
在前快后慢工况下,剪式框架运行至最顶端时的应力最大,运动过程剪式框架某铰点的受力曲线和小轮与轨道的接触力曲线见图1。
图1 前快后慢工况仿真结果
2.2.2 前慢后快工况
在前慢后快工况下,剪式框架运行至最顶端时的应力最大,运动过程剪式框架某铰点的受力曲线和小轮与轨道的接触力曲线见图2。
图2 前慢后快工况仿真结果
3 结语
通过刚柔耦合动力学分析,可以得到2种工况下剪式框架运行过程中应力的实时变化情况,以及连接铰点和滚动小轮的受力情况。分析结果可以指导剪式框架的设计,解决采用多刚体计算卡死的问题。仿真结果为剪式稳定架的设计和优化提供参考。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020