















































软件

产品


01前言
本文主要说明利用Adams Controls功能,输出与Matlab联合仿真接口文件后,可以通过多种方法在联合仿真开始那一时刻之前对模型的修改,从而满足一些客户的需求,即只生成一次联合仿真用的接口文件,但可以对模型反复修改,以便适用多工况仿真、多方案对比的要求。
02方法
Adams与Matlab机电联合仿真功能,在工程上有广泛应用,尤其是在以机械臂/机器人为代表的机电行业深入发展的今天,该功能的应用也在不断地深入。
下面以Adams软件安装程序自带的平衡球案例,对机电联合仿真及其模型修改的方法进行说明,
(文件位置:Adams_installation_directory\controls\examples\ball_beam),
平衡球模型如下所示:
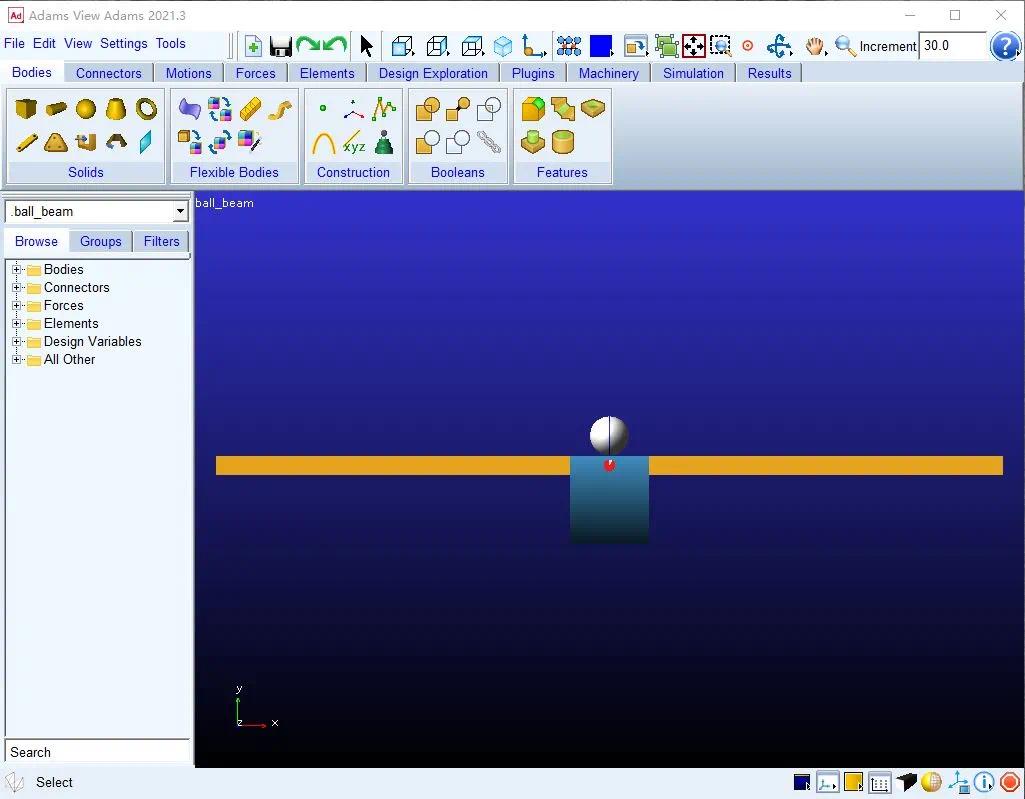
图1 平衡球机电联合仿真模型
首先,进行默认状态下和初始命令状态下的接口文件生成。选择输入力和输出角度及位移,目标软件选择Matlab,将获得用于联合仿真的系列文件,主要是.m/.cmd/.adm文件,如下所示:
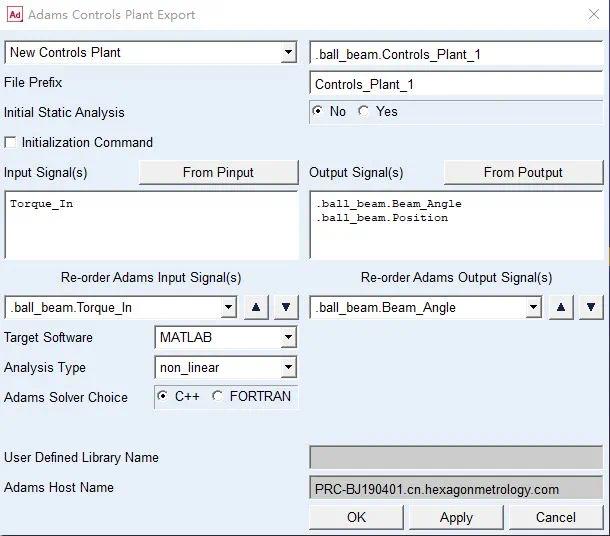
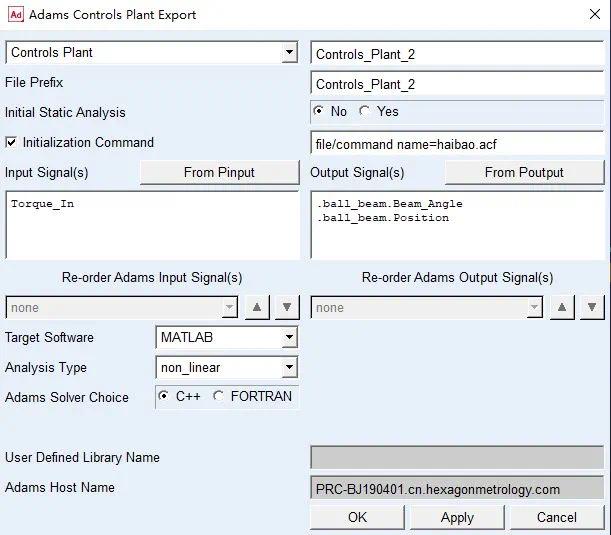
图2 生成接口文件
图2上边为默认状态,下边为有初始命令的状态,通过名称加以区分,分别为Controls_Plant_1和Controls_Plant_2。两种状态的联合仿真结果对比,如下所示:
图3 联合仿真给Adams输入的力信号
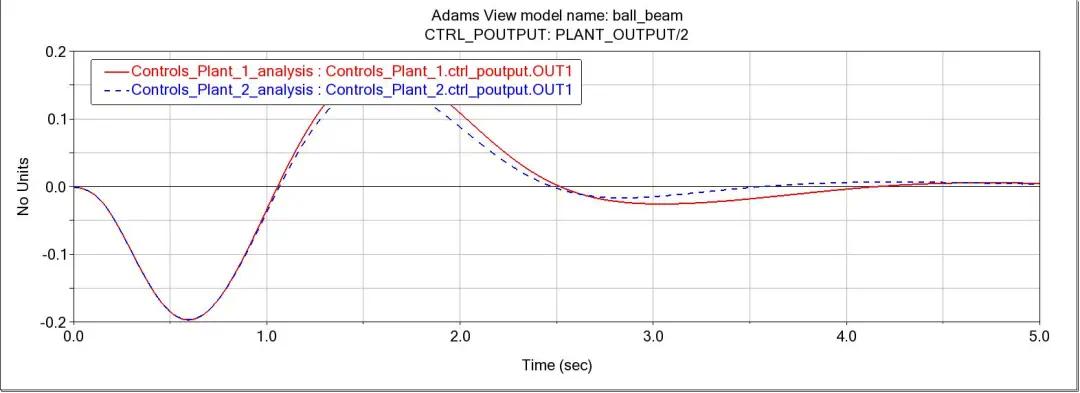
图4 联合仿真从Adams输出的平衡梁转角信号
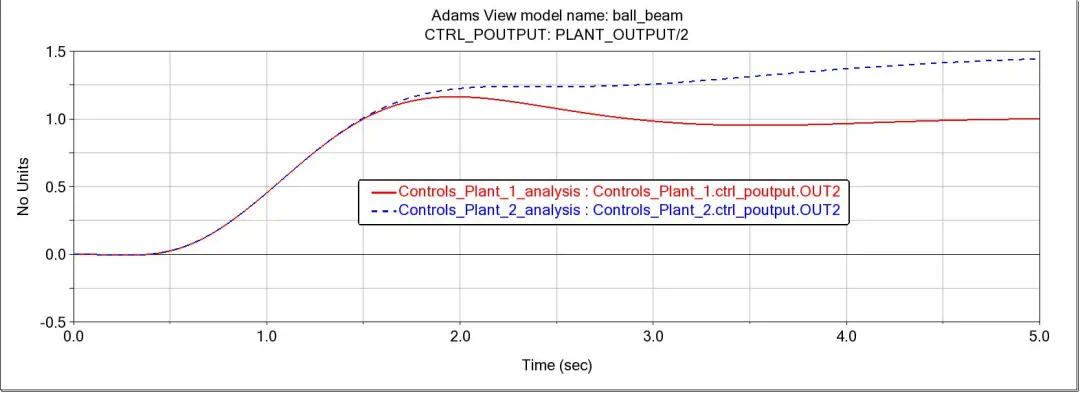
图5 联合仿真从Adams输出的球沿梁方向的位移信号
之所以有上述的区别,在于通过初始化命令文件haibao.acf对原始模型进行了修改,文件中的命令如下所示:PART/3,MASS = 0.1其中,Part/3为球体,将其质量从初始的0.01kg修改为0.1kg,从而出现上述结果差异。
以上是通过命令文件haibao.acf对模型进行修改,可以在此文件中键入多条命令实现对模型的大规模修改。如果只是简单命令的修改,可以直接在接口文件导出界面中键入命令,如下所示:

图6 直接输入初始化命令
03总结
通过上述的初始化命令和初始化命令文件都可以实现对机电联合仿真的模型修改。
通过观察可以发现,修改模型的命令和Adams Solver的命令一致,也就是与.adm文件中的命令是一脉相传的,所以,通过这个小功能点,可以为使用Adams的工程师提供一个扩展的方向,提升对Adams架构的理解和应用的高度。
本文描述了Adams机电联合仿真的模型修改的方法,实际工程应用中,还经常可能还需要对控制一方进行修改,可以通过修改Matlab的m文件实现。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















