















































软件

产品


简介
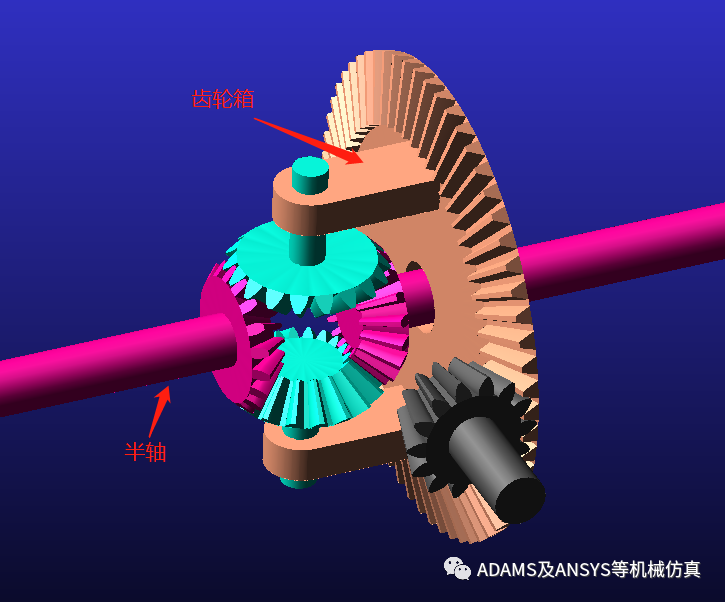
车辆差速器是一种差速传动装置,车辆在转弯过程中,内外两侧的车轮行走的距离是不相同的,如果两轮处同一轴上会出现角速度相同,而行驶距离不同,最终出现打滑。实际上即使车辆直行时,也会因为胎压、轮胎磨损程度、装配精度等问题而滚动半径不相同。而打滑会造成轮胎的异常磨损、能量消耗过大、转向失效等为题,因此需要增加差速器保证两侧车轮的纯滚动。

本文主要通过ADAMS/View建立差速器模型,并且将其应用在简化的小车上进行仿真分析。
1.差速器建模
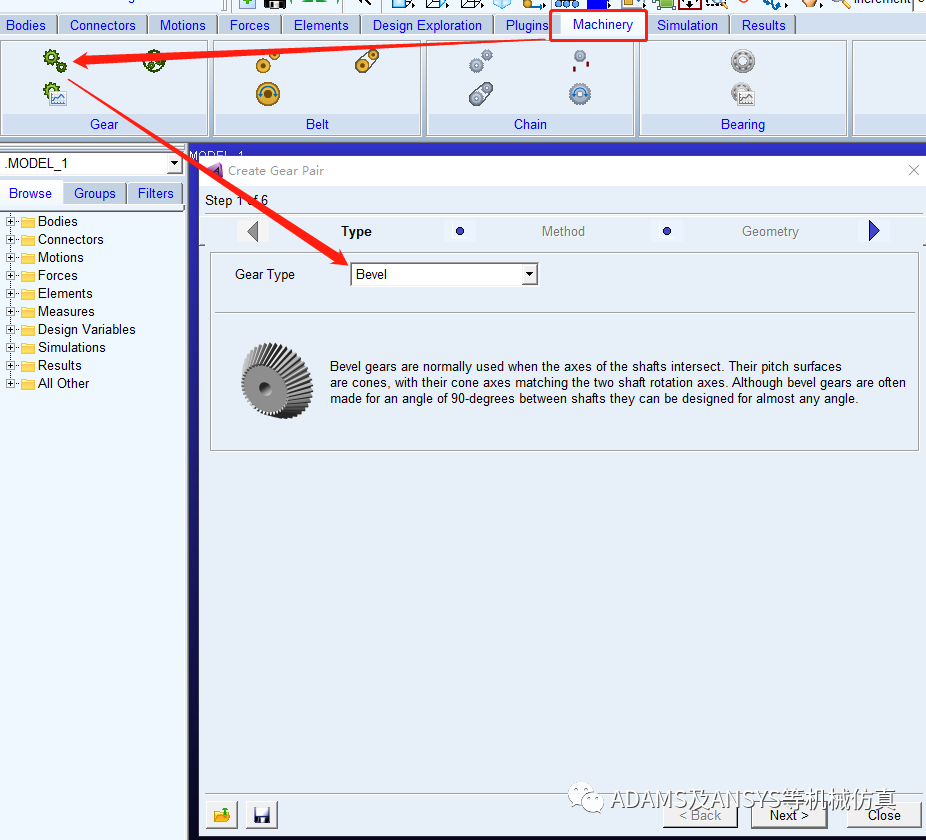
差速器主要由行星齿轮、半轴齿轮、驱动齿轮、从动齿轮等组成,本次差速器的建立主要基于view中的Machinery模块(也可以通过CAD软件建立导入),具体的建立方法如下所示:首先点击Machinery,选择齿轮组,然后选择锥齿轮(Bevel)。
1)建立齿轮组
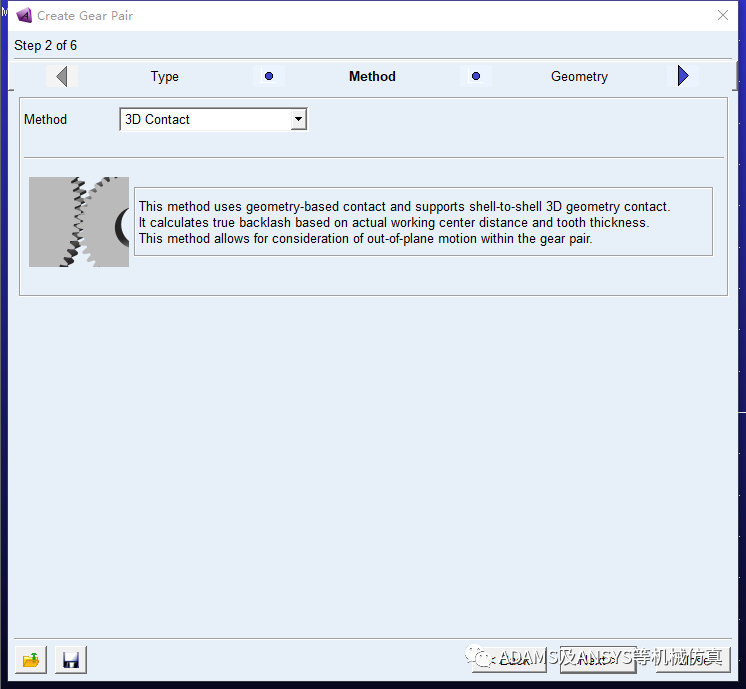
然后选择Next,选择3D Contact(接触方法)
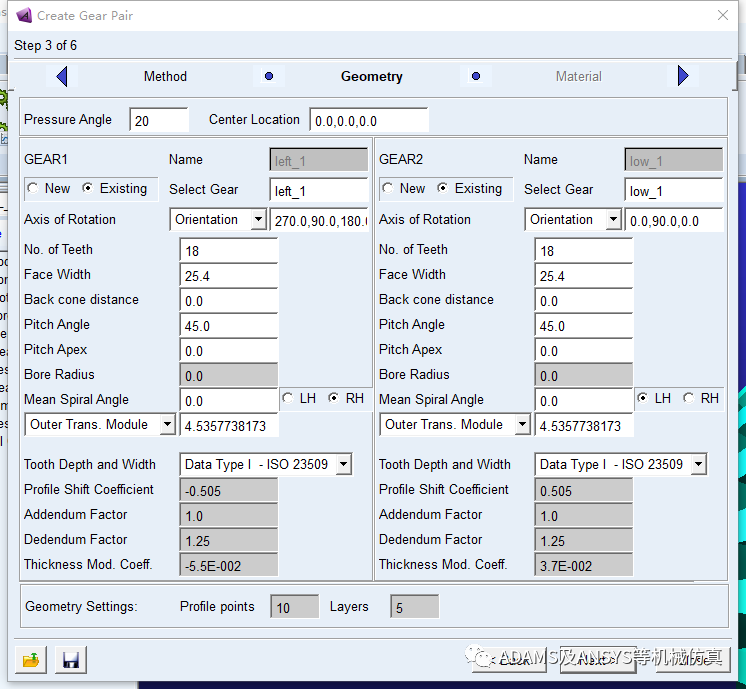
完成后点Next进行锥齿轮参数设置:
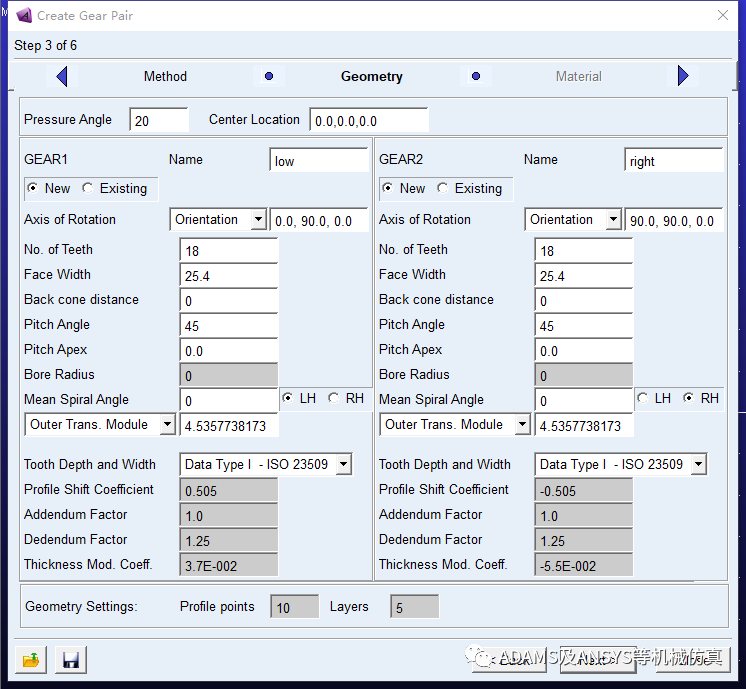
图中的具体参数及含义如下:
Axis of Rotation: 旋转轴方向 No.of Teeth: 齿数 Face Width:齿宽
Back cone distance: 背锥距 Pitch Angle: 节距角Pitch Apex:节距顶点
Mean Spiral Angle:平均螺旋角
设定好之后点击下一步,直到出现如下界面:
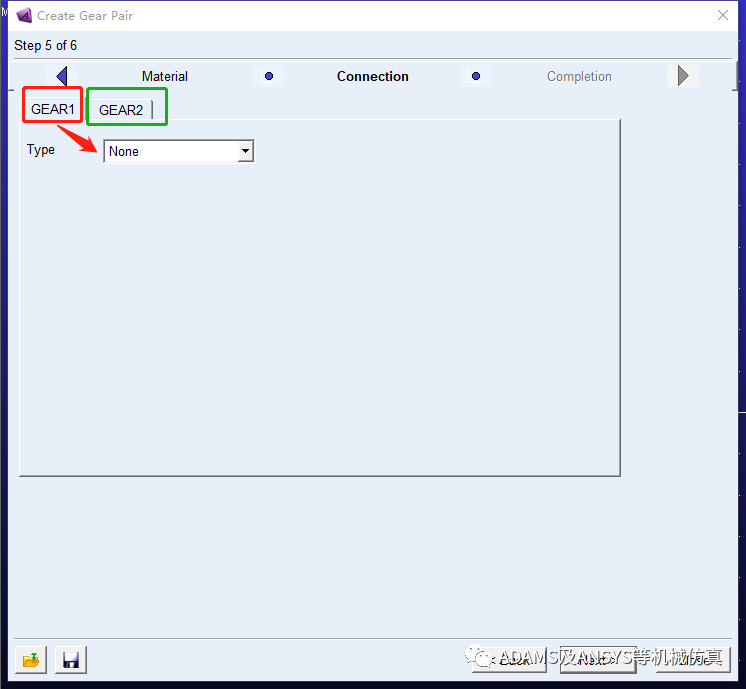
两个齿轮的连接方式都选择None,在后期可以根据齿轮的位置自定义添加旋转副。完成后一直点击Next,完成如下图所示的齿轮建立。
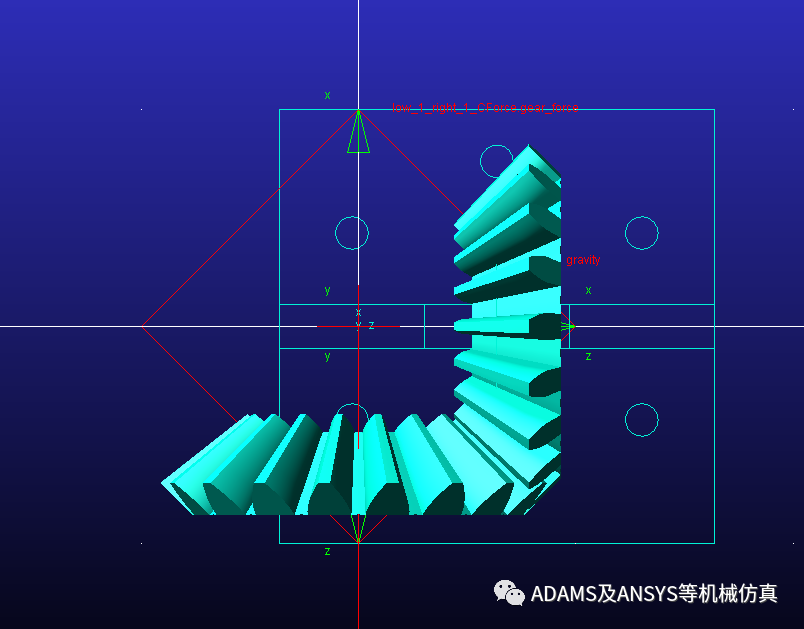
如下图,同样的方法建立上部齿轮,需要注意的是,GEAR_1采用Existing(现有的)齿轮,即右侧齿轮,而GEAR_2则是新建立齿轮(建立时注意轴的方向)。
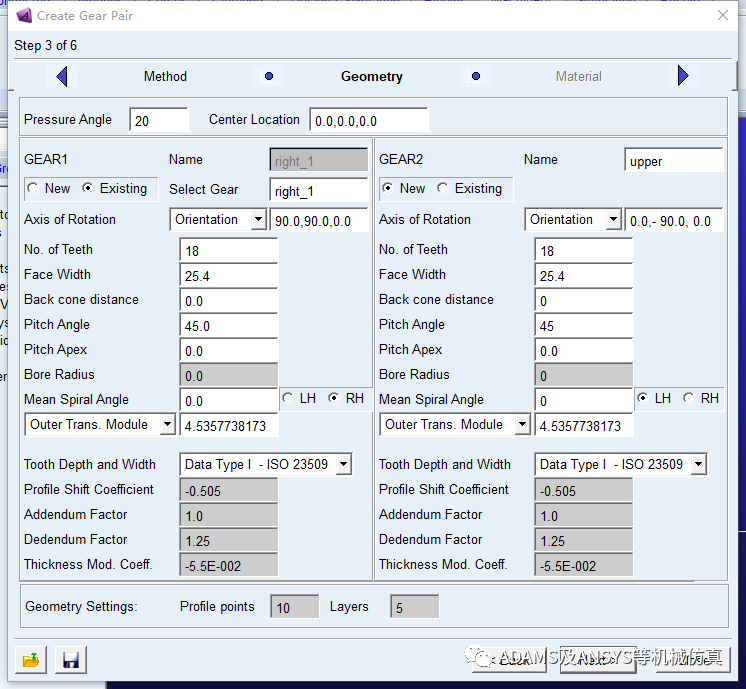
完成后如下图所示(其余步骤和第一对齿轮建立时相同):
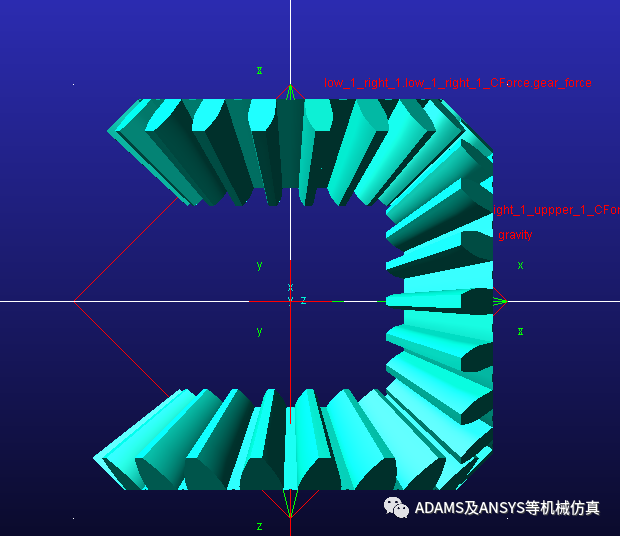
同样的方法建立左侧齿轮(注意轴的方向):
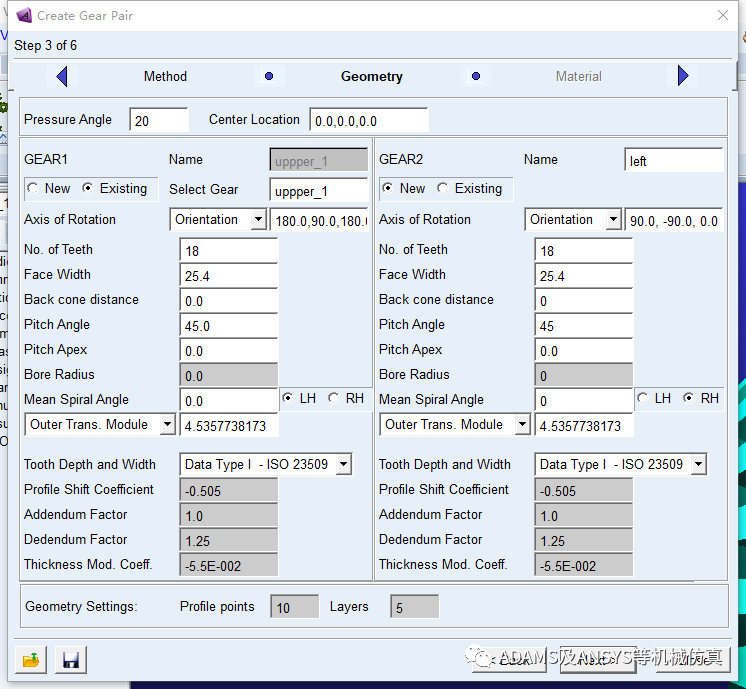
最终建立好了行星轮和半轴齿轮(轴在后文中建立),如下:
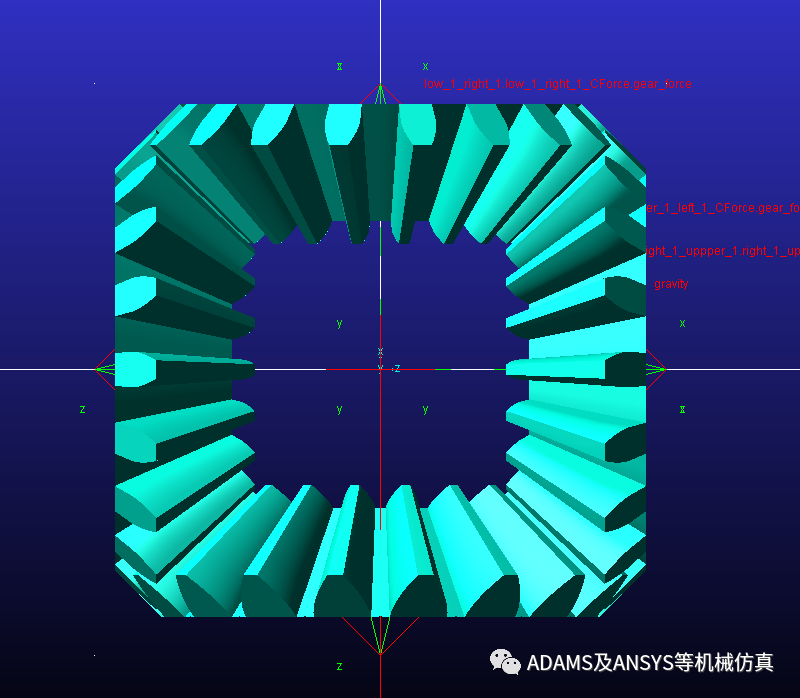
需要注意的是,此时左侧齿轮和下侧齿轮没有建立啮合,需要按下图建立啮合关系。
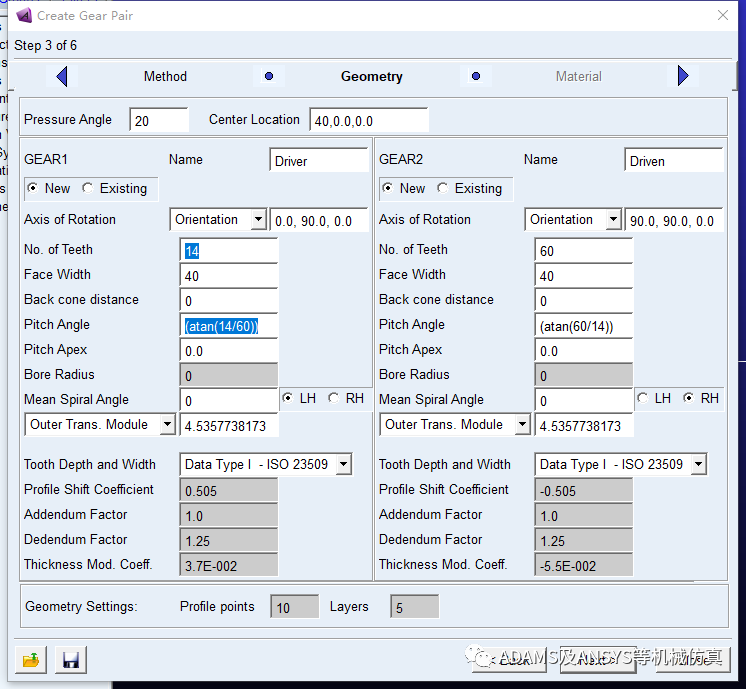
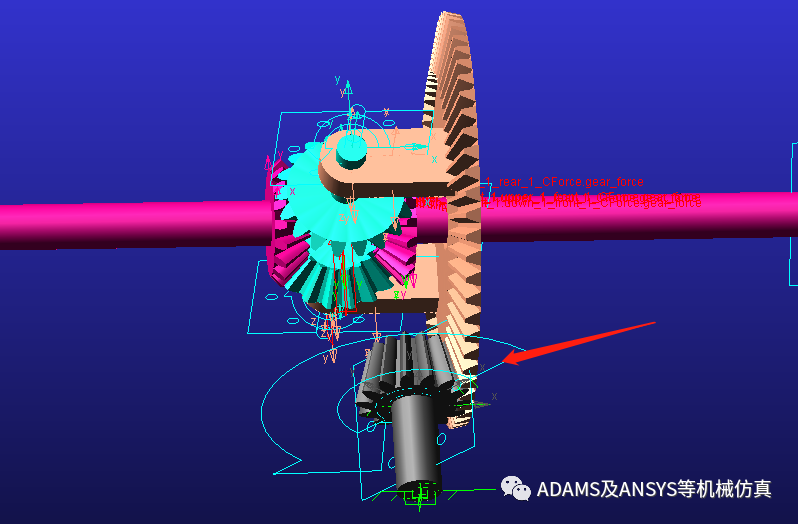
下图是建立驱动齿轮和从动齿轮的参数(需要注意的是:两个齿轮的位置,轴的方向),其他步骤与上文相同。
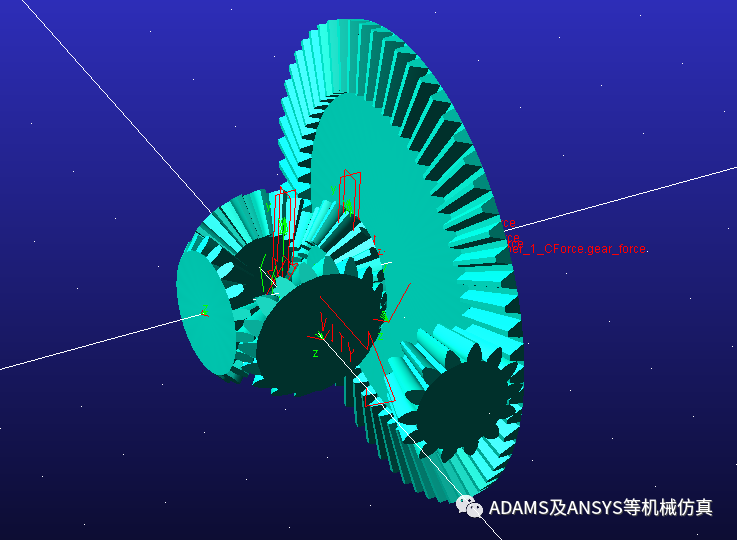
最终建立好如下的齿轮组:
2)建立半轴及齿轮箱
建立半轴的过程主要通过建立圆柱连杆,然后通过布尔操作(半轴与行星轮)及固定约束(齿轮箱与从动轮):
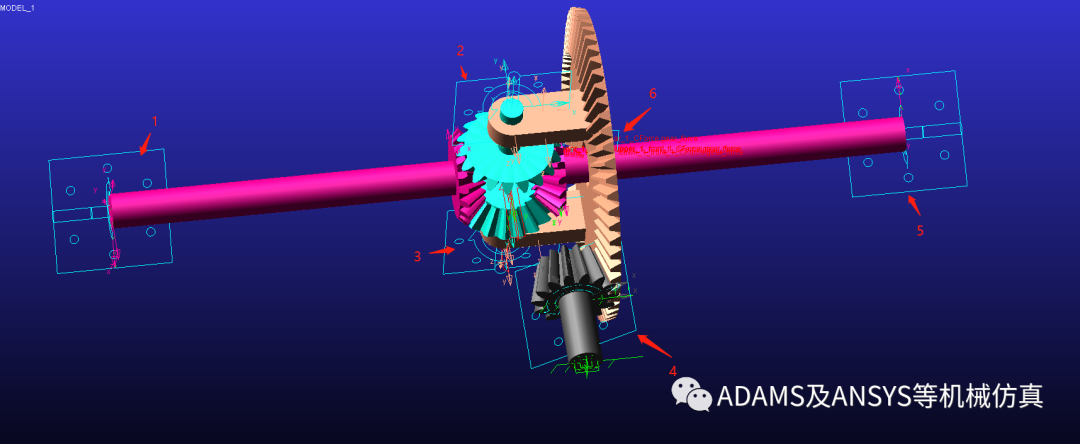
3)约束副的建立
如下图所示:1、5两个旋转副为半轴齿轮与地面建立的旋转副,2、3两个旋转副为齿轮箱与行星齿轮建立的旋转副,4为驱动齿轮与地面建立的旋转副,6为从动齿轮与右侧半轴建立的旋转副
2.差速器仿真
如下图所示,在驱动轴上加驱动,此时两个半轴所处的环境一样,两半轴转速是相同的。
如下动图所示:行星齿轮不相对齿轮箱转动,而两个半轴齿轮转速相同,这种情况模拟了车辆理论直行的情况。
在下图中,左半轴加一定数值的驱动,而右半轴不加,模拟两轮所示环境不同(转弯等路面)
通过仿真,动图如下,这时,两行星轮开始工作,从而使得两半轴齿轮的转速不同。
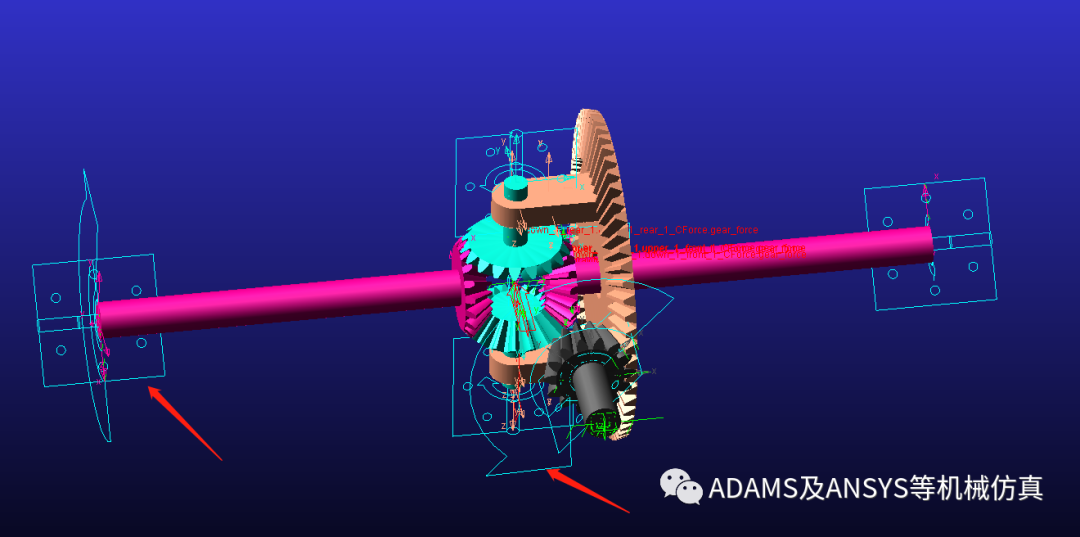
3.四轮后驱动小车模型建立

建立好的模型如上图所示,首先左右半轴齿轮两端建立轮胎模型(轮胎与半轴齿轮通过固定副相连),上文中建立了两半轴与地面的旋转副,在该模型上需要删除,然后如上图中间黄色球所示,建立一个车架,并建立两半轴齿轮与车架的旋转副,同理,删除原有驱动轴与地面的旋转副,建立驱动轴与车架的旋转副。
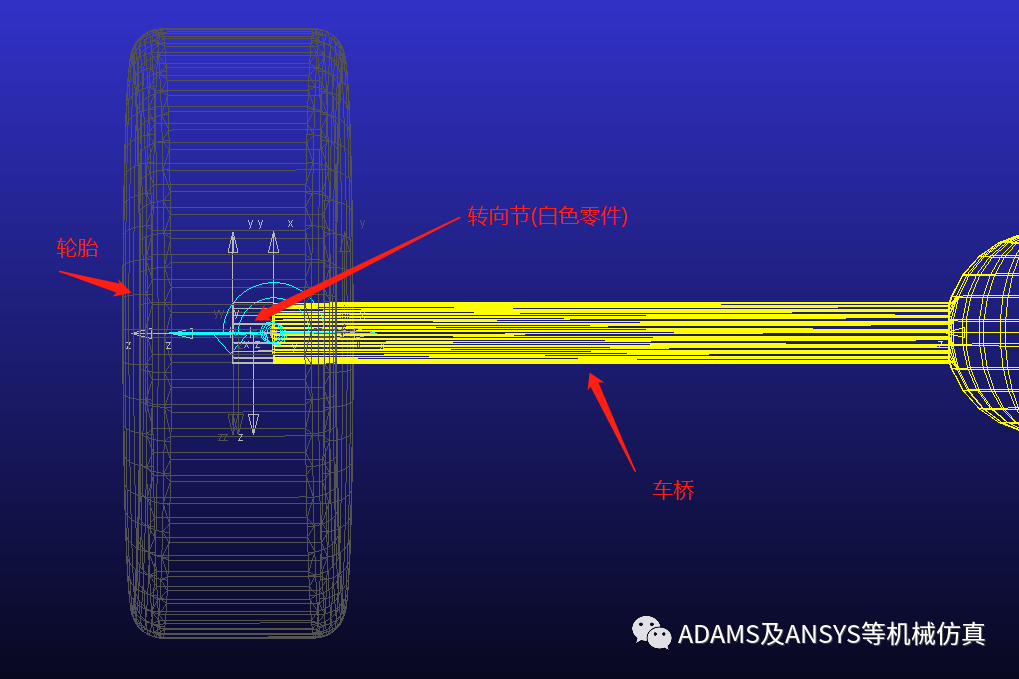
如上图,在前桥处,建立一个转向节(简单)及轮胎模型,然后建立车桥与转向节的旋转副,该旋转副主要用作转向(在左右侧的旋转副上加相同参数的旋转驱动来模拟转向),同时,建立转向节与轮胎的旋转副(上图中没有体现出),同理在右侧建立同样的结构。这样完成了转向机构和前桥的建模。
4.四轮后驱动小车仿真
在前轮两个转向驱动处加step(time,0,0,5,10d)的驱动函数来模拟转弯工况,中间驱动轴的驱动为:300d*time。具体仿真动图如下所示:
下图为差速器两端车轮角速度数据曲线:
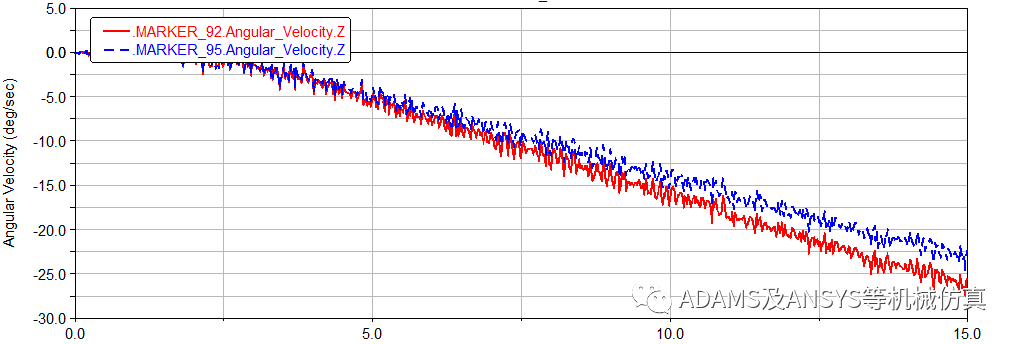
如上图所示,差速器所在的左右两轮角速度在转弯的时候是不相同的,其中Marker_95为转弯内侧车轮,Marker_92为转弯外侧车轮,从图中看出,外侧车轮的角速度大于内侧车轮角速度,符合实际情况。
上图为车辆直行运动工况,差速器行星轮不工作,两轮转速相同。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















