















































软件

产品


六自由度机器人抓取仿真的关键在于末端轨迹与抓取力控制。在Adams中按以下步骤进行:
模型导入:从CAD导出机器人装配体(含夹爪、工件)为.x_t格式,导入后定义各关节旋转副,驱动用运动学函数或力矩。
抓取模拟:在夹爪与工件间添加“接触”和“黏附”(或使用锁定副)。夹爪闭合时触发接触力,达到一定压力后激活锁定副,实现工件随动。
驱动设置:给定末端轨迹(如从A点抓取移至B点放置),用一般点运动或逆运动学脚本控制关节角。
测试输出:后处理提取末端实际轨迹与理论轨迹偏差、夹爪接触力峰值、电机扭矩曲线。若抓取过程中工件滑落,可增加摩擦系数或调整夹持力阈值。此方法可预先验证程序可达性,避免物理试教碰撞风险。
1、前处理
1.1 几何模型的构建:打开AdamsView,新建文件,定义文件名,导入模型并设定单位制为MMKS,如图1所示。
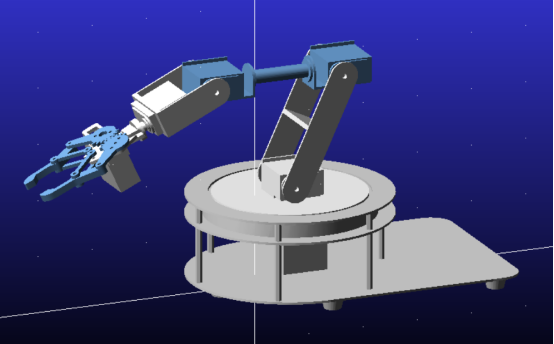
图1 机器人模型
1.2 材料定义:使用Adams中的默认的steel材料。
1.3 动力学系统构建:
1.31 运动副的构建:建立关节之间的转动副,底座对大地的固定副,手部各个部件之间的转动副(为了不出现冗余约束,使用到了基本副和耦合副),手部约束设定如图2所示。

图2 手部运动副的定义
1.3.2 验证模型:点击Verify Model 验证模型,如图3所示,无冗余约束,自由度数为6。
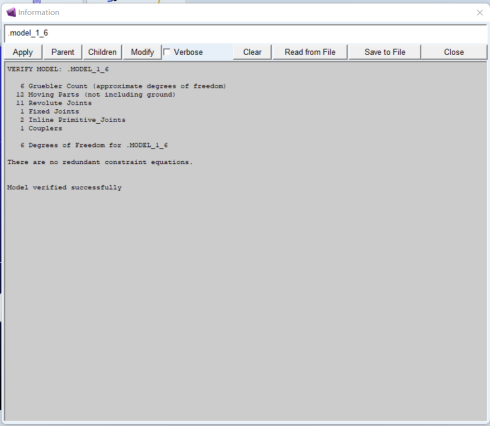
图3 验证模型
2、求解
2.1驱动条件:设定每个关节位置的转动驱动,驱动大小如图4。
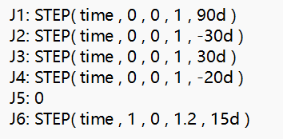
图4 驱动大小
2.2 求解设定:定义求解时间为1.5s,求解步长为100步,点击开始求解。
3、后处理
3.1 仿真动画:求解完成后可以查看其仿真动画,如图5所示。
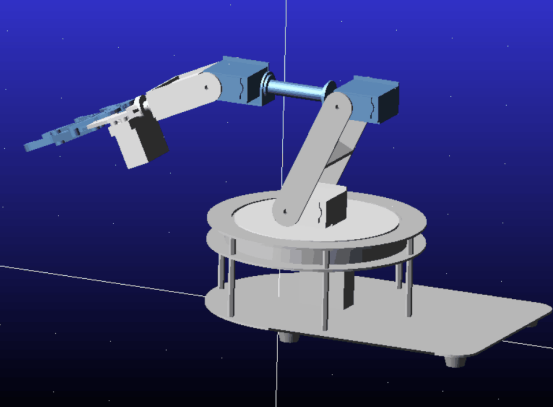
图5 结果动画
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















