















































软件

产品


摘 要:
针对老年人在如厕时由于膝关节老化而难以站立的问题,设计了一种基于虚拟样机技术的自动化助老起升 装置。首先基于机械原理完成核心机构和装置的设计,然后利用 CRE O完成三维模型的建立,再在多体动力学 ADAMS 软件中建立该虚拟样机的运动学模型,通过测量指定点的位移、速度、加速度等运动学参数的变化曲线完成仿真 分析,最后在实验室制造出物理样机进行实际验证,该研究结果为后续批量生产提供理论研究依据。
关键词: 虚拟样机; ADAMS; 四连杆机构; 运动学仿真
0 引 言
伴随着社会的不断进步和发展,人口老龄化的问 题也在不断加剧,并逐渐成为当今社会的主要问题之 一。经调查,我国每年约有 4 000 万老人会因地滑摔 倒,其中发生在卫生间里的摔倒事故占 50%,而摔倒 的主要原因是如厕后突然起身导致脆弱的膝盖无法 承受身体的重量而摔倒,摔倒问题严重影响了老年人 及其家人的身心健康与生活质量[1]。
国内外已经有 一些学者开始研究相关的产品,市场上已经有一些对 应的产品,但是这些产品还存在实用性不强、结构冗 余、制造成本较贵等问题。雷中贵等采用 Vicon 系统 对老年人从坐姿状态到站立状态进行采样分析,获取 了能使老年人顺利起身站立的安全速度,但未提及采 用的具体的自动化辅助站立装置[2]。
董绪斌等研究 了老年人坐、卧姿态,通过 ANSYS 有限元技术完成了 助老床椅一体化的机械系统设计,此设计虽然可以满 足基本功能,但是未对机械结构进行优化设计,设计 成本还有降低的可能性[3]。
王淑坤等利用 CATIA 软 件和 ADAMS 软件对一种助老智能轮椅进行了运动 分析,并通过 ANSYS 软件对关键零部件进行了静力 学分析,以探究其最大受力和应变,但未体现出整体 结构的疲劳寿命分析,缺少直接投入生产和使用的依 据[4]。
芮进通过 ANSYS 软件设计了一种多功能轮椅 结构,并对其进行了静力学分析和拓扑优化设计,但 未体现出装置在受力状态下的最大变形,整个装置的 刚度有待进一步探究[5]。
针对上述情况,笔者拟基于人体工学与机械原理 设计一款自动化机械起升装置,其核心部件是利用电 动推杆带动四连杆机构实现人体的起升; 通过在 ADAMS 软件中对虚拟样机进行运动学仿真,得出该装 置的运动参数符合人体工程学,从而为助老机械的研 发提供一定的参考和借鉴。
1 助老起升装置三维模型的建立
1.1 设计要求 根据起升装置的使用条件和基本的设计要求,在保 证老年人的安全性条件下,确定基本的设计要求如下。
1) 考虑到一般老年人的体重,最大起升人体重 量为 100 kg,起升板的安全速度不大于 72.8 mm /s,工 作状态结构的最大变形不超过 0.3 mm,以保证整体 的结构强度和刚度[6]。
2) 依据人体工学确定基本框架尺寸,并设定合 适的起升工作角度。
3) 在保证设计标准的情况下严格控制成本,整 体框架采用铝合金型材 6063-T5,连杆机构采用 45 钢材料,厚度 5 mm,起升板厚度为 7 mm。
4) 装置在收缩状态时,起升板处于水平面,且 板的前端可以由铝合金框架提供支撑。
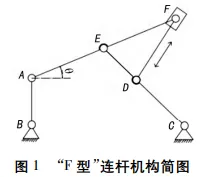
5) 基于机械原理确定核心连杆机构,如图 1 所 示; 当 DF 驱动连杆机构完成起升动作且起升板与水 平面夹角 θ 为 16°时,可保证老年人站起时的平衡。
1.2 建立三维模型
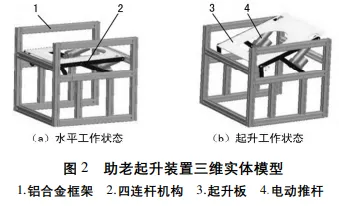
利用图解法确定各杆件长度,完成核心机构的尺 寸设计。根据装置的使用环境及人体标准工位尺寸, 确定该装置的其他构件尺寸及主体框架结构,在 CROE3.0 中,根据实际模型尺寸进行 1 ∶ 1 建模,其三 维实体模型如图 2 所示。
2 ADAMS 虚拟样机的运动学仿真分析
利用多体动力软件 ADAMS 对装置进行运动学 及动力学仿真分析。
2.1 模型导入
首先在 CROE 中对建立好的装配模型进行简化, 在保证模拟真实工况的前提下,省去螺栓、角件等零 件,后续用布尔操作来代替[7]。然后将简化后的模 型另存为 ADAMS 软件可识别的.x_t 文件,并导入到 ADAMS2018,完成基本的单位设置。
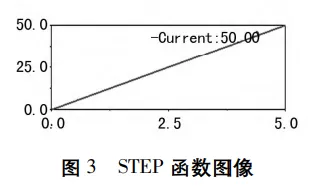
此模型中的材料种类较多,见表 1。主体框架为 锌铝合金 6063-T5,起升板和连杆材料为普通 45 钢。
由于三维模型结构较为复杂,需对 28 个零件模 型进行布尔操作,以便优化结构组成,如将主体铝合 金框架合为一组,其余对称零件分别合为一组,一共 分为 6 组零件。
2.2 连接设置
由于此产品需进行运动分析,故设置完模型后需 进行运动副连接设置,根据 ADAMS 软件运动库内 容,装配体主要由旋转副、移动副、固定副组成,具体 类型及相关构件信息见表 2。

2.3 施加载荷与驱动
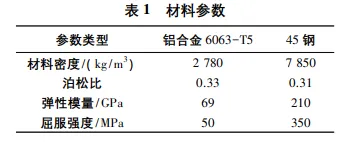
起升板在静止状态下额定载荷为 1 000 N,但是 在运动过程中,根据受力分析,其额定载荷为一个时 间函数,即 F = 1 000 cos( 8t) ,其中 t 为运动时间。由 于推杆的行程为 40 mm,额定速度为 10 mm /s,在电 动推杆中施加类型为 translational 的驱动[8],其位移 函数为 Function = 10* time,图像如图 3 所示。
2.4 仿真设置
最后进入 Simulation 模块,根据模型的实际运动 情况对仿真时长及步数进行设置,进而得到相关运动 参数曲线,自此完成 ADAMS 环境下模型的设置,如 图 4 所示。
2.5 仿真分析结果
进入 Simulation 模块进行仿真,时间为 4 s,步数 为 100,进行交互式仿真,设定竖直方向为 X 向,水平 方向为 Z 向,取起升板后缘( 起升侧) 中心点 MARKER_59 为观测点,从而在后处理模块 PostProcessor 中 获得起升板在竖直方向( X 向) 和水平方向( Y 向) 的 位移、速度和加速度曲线[9],如图 5~7 所示。
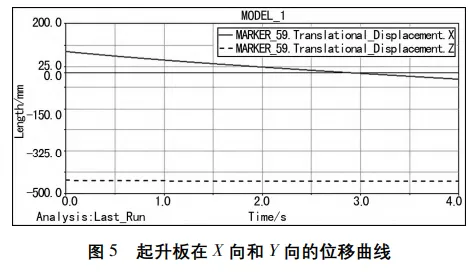
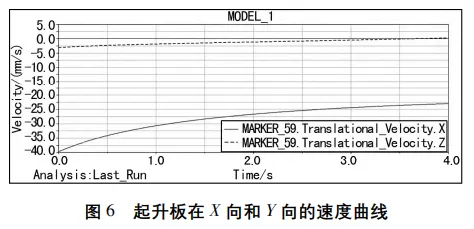
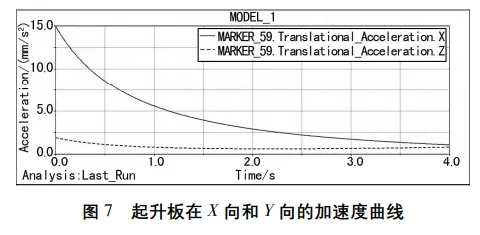
由图得: 在 0~ 4 s 的运动时间段,起升板在变化 载荷的作用下,在竖直方向的速度由 40 mm /s 降为 22.5 mm /s,在水平方向的速度由 2.5 mm /s 降为 0。 起升板在竖直方向的加速度由 15 mm /s 2 降 为 2.5 mm /s 2 ,在水平方向的加速度由 2 mm /s 2 降为 0。 其最大速度和加速度均在阈值允许范围之内,这表明 该虚拟样机的核心连杆机构设计合理,运动参数能满 足安全性的要求[10]。
仿真无误后,设计人员按照 1 ∶ 1 比例在实验室内完成物理样机的装配制造,如图 8 所示。在实验中 对该样机的起升角度、起升速度、起升加速度、承受重 量、基本功能进行测试,虽然起升角度、起升速度与设 计参数存在不超过 0.35%的误差,但考虑到装配及测 量存在误差,且物理样机在实际环境中也能正常工 作,因此反映出通过 ADAMS 软件进行运动学分析是 准确且可靠的。
3 结 语
文章基于 CROE 软件完成助老如厕辅助机械装 置的三维设计,然后在 ADAMS 软件中模拟真实工 况,对虚拟样机进行运动学仿真,得出关键部位的位 移、速度和加速度变化曲线,从而验证了该装置的运 动可行性,此研究为同类助老机械装置的数字化设计 提供一定参考和借鉴。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















