















































软件

产品


1.履带设计
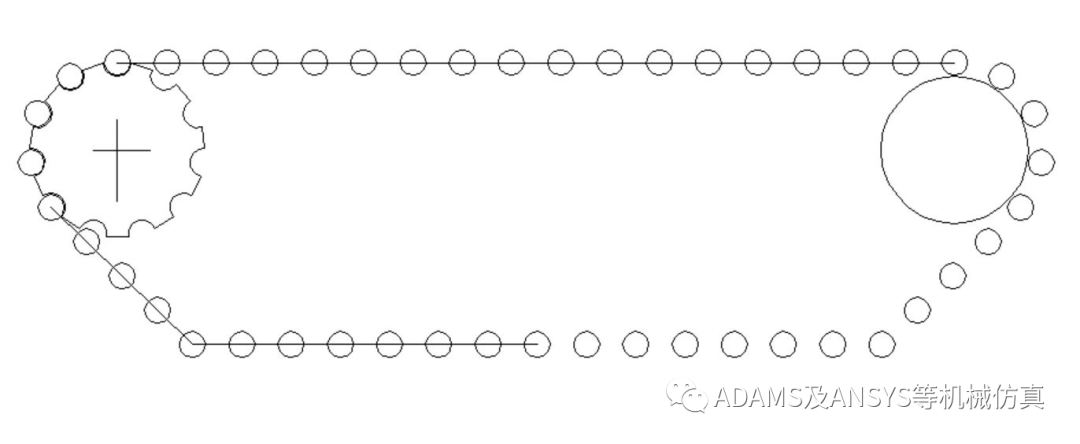
本文的履带设计主要参考链节、链轮。在设计链轮之前要确定:齿数z、分度圆直径d、链条滚子直径d1、节距p等参数,本文取链节数为11,节距为9.5。为保证履带与链轮的配合关系,在整条履带长度为节距的整数倍的前提下,保证履带的几何参数。经过计算,履带及链轮的组合如下图所示:
2.履带动力学模型的建立
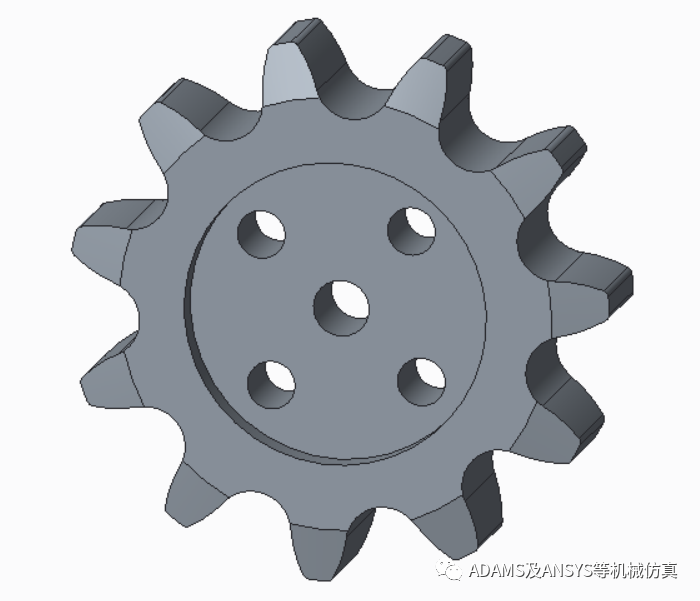
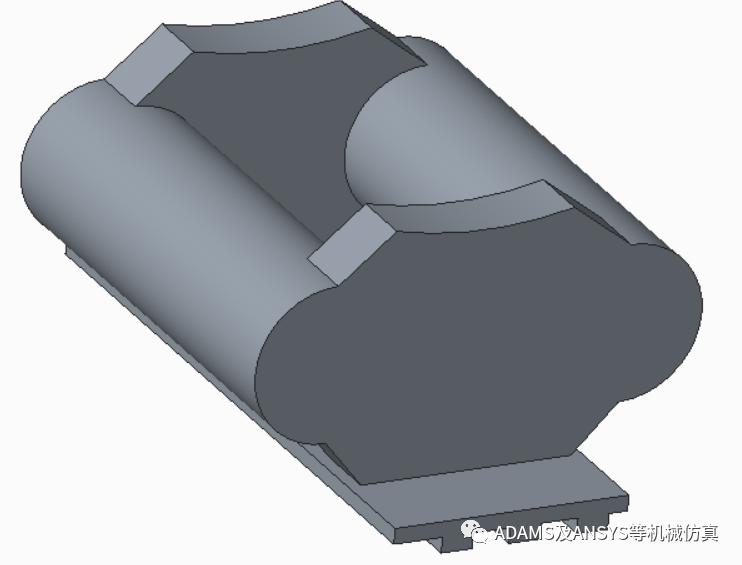
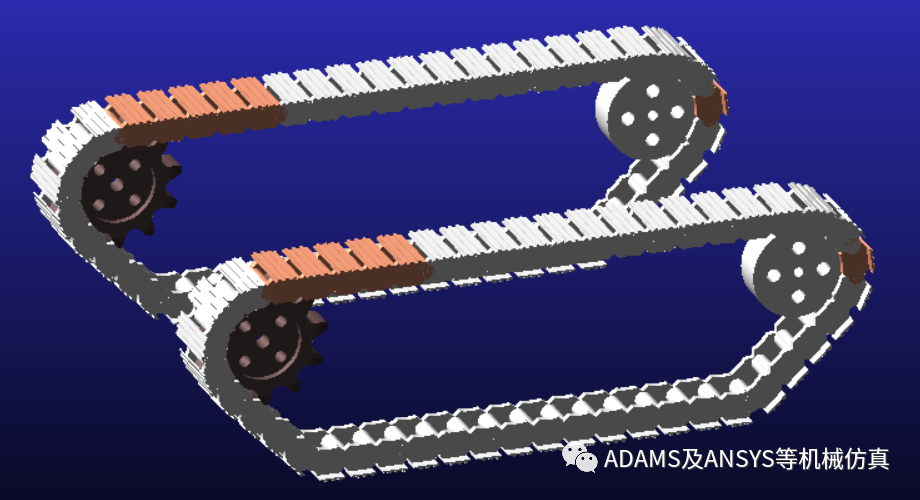
①首先根据设计尺寸在3维建模软件中将链轮及履带节画出,具体如下所示:
在软件中按履带几何关系装配好后,导入到Adams中,具体如下所示(履带右侧轮为支撑导向轮):
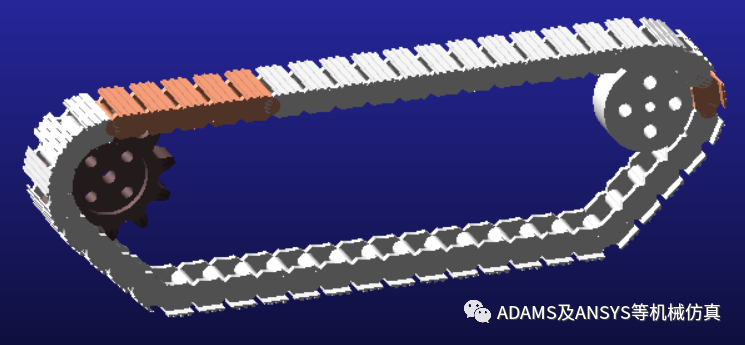
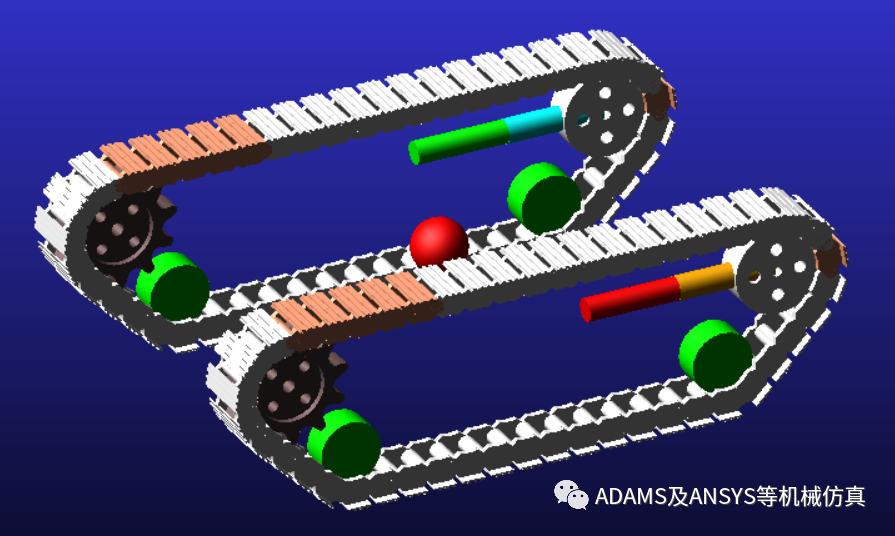
此时只有单侧履带,经过复 制(将单侧履带及链轮、支撑导向轮全选后,ctrl+c完成复 制),平移后如下图所示:
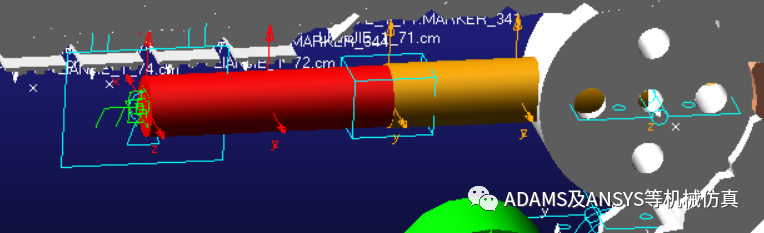
②履带小车其他零件建立:首先在两履带中心建立车身,用小球代替(下图中红色圆球);然后在履带的两个底角处建立两个支撑轮(下图中两个底角的圆柱);然后在后面的两个支撑导轮处添加两个连杆(用于这两个支撑导轮的前后运动),具体如下:
③履带小车约束副的建立:首先在所有的的链节间建立旋转副:
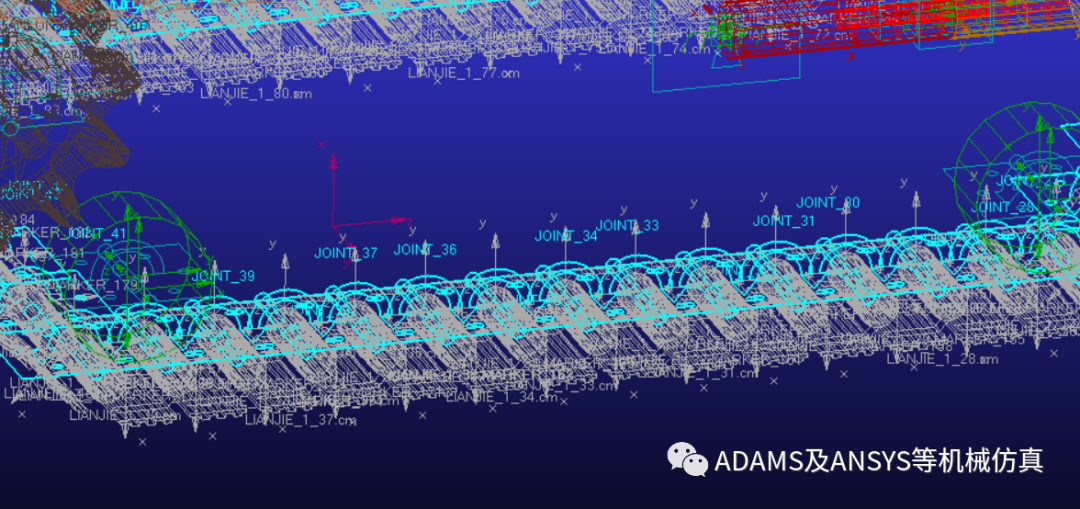
然后建立链轮、支撑轮与车身(小球)的旋转副:
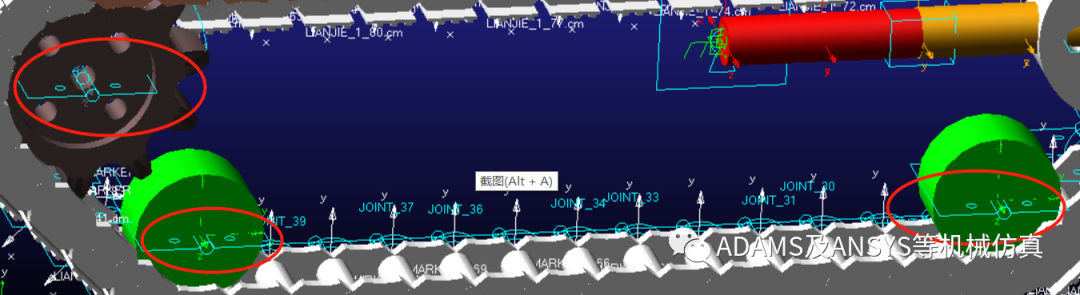
最后在左侧连杆与车身间建立固定副,在左侧与右侧连杆间建立移动副,在右侧连杆与支撑导轮间建立旋转副,这样支撑导轮就可以前后的伸缩了,具体如下:
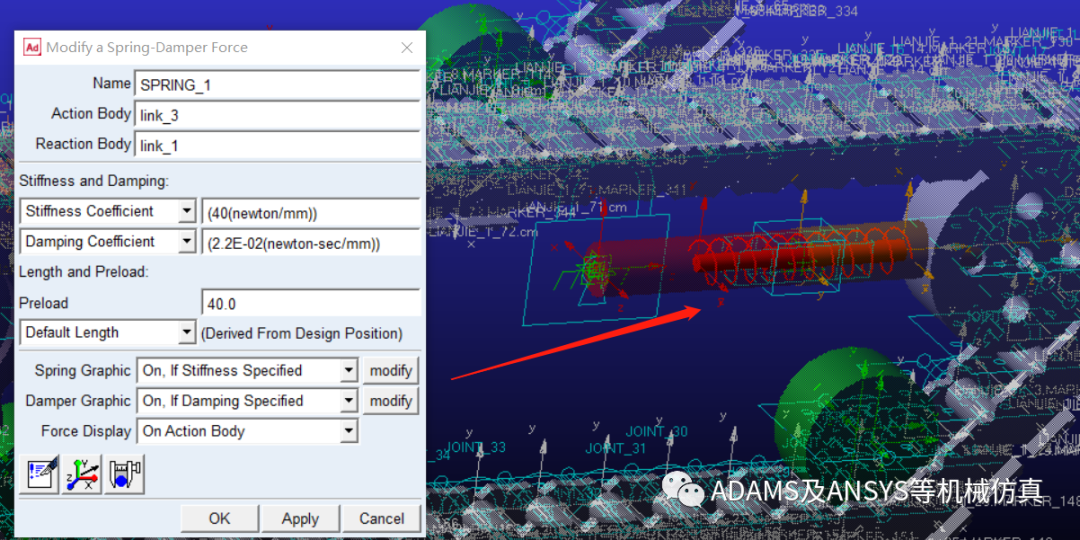
④支撑导轮预载及弹簧力的添加:在两个连杆间建立刚度弹簧,同时施加预载(Preload),使履带车在运动之初支撑导轮能处于张紧状态,具体如下:
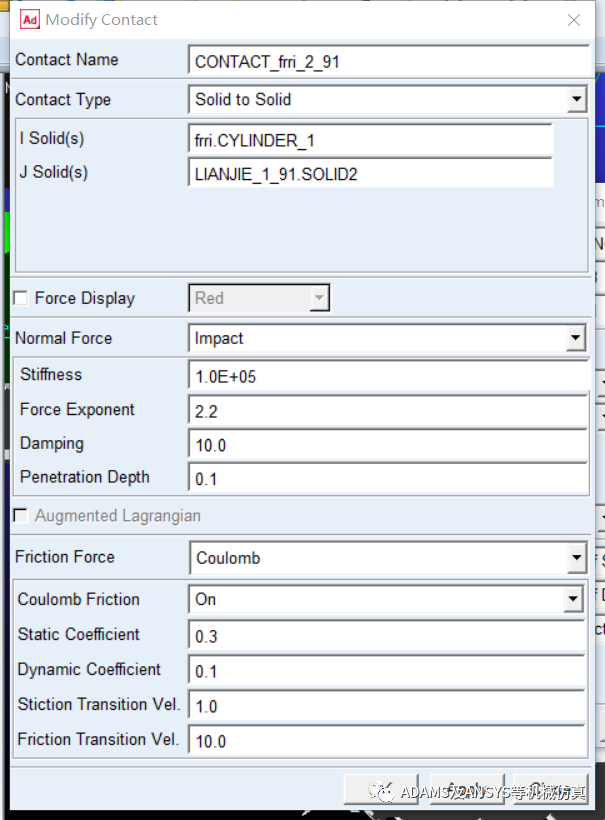
⑤接触的建立:需要在履带节与所有驱动轮、支撑导向轮、支撑轮之间建立接触,然后在地面与履带节间建立接触。由于接触对太多,采用循环命令流建立,具体的接触参数如下:
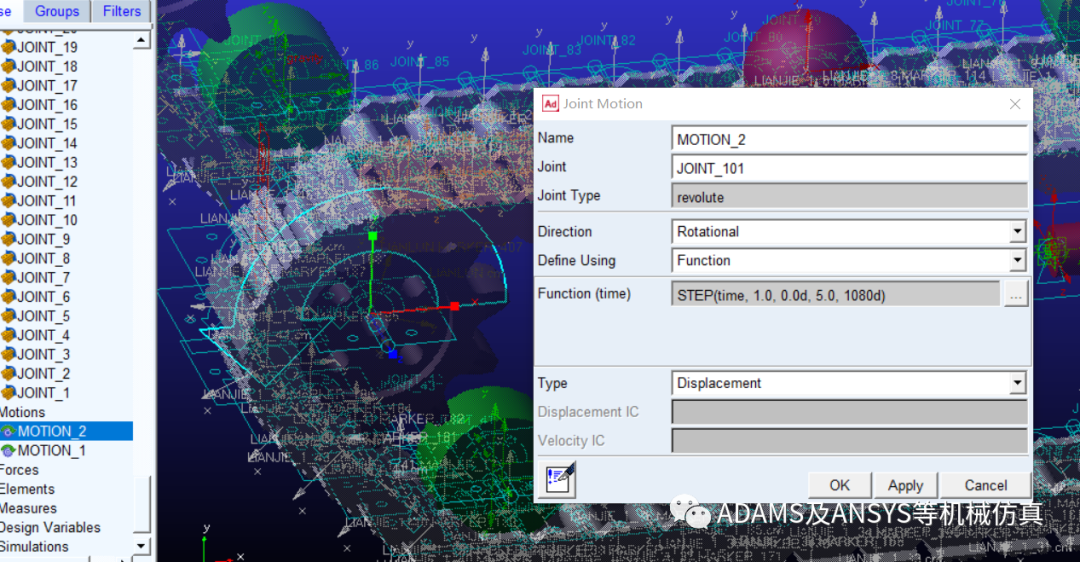
⑥驱动的建立:在两个驱动链轮上施加两个相同的驱动,具体如下:
3.运动仿真
添加驱动副后,进行仿真分析,由于接触过多,将计算分析步设小一些,便于得到合理结果。经过计算后,两驱动轮在相同的驱动下使履带小车向前运动,具体如下:

然后改变驱动方式:保持右侧驱动不变,将左侧的驱动设置为0,也就是左侧链轮不发生相对转动,经过仿真,具体如下所示,履带小车以左侧履带为圆心进行绕圆运动。

然后再改变驱动方式:保持右侧驱动不变,将左侧的驱动设置为与右侧驱动方向相反,经过仿真,具体如下所示,履带小车以自身中心进行原地转向运动。

然后在地面上添加减速带,并使两驱动保持一致,运动结果如下:履带小车成功越过障碍。

免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















