















































软件

产品


Abaqus/Standard应用Newton-Raphson算法解决非线性问题,木木本期就为同学们“尽可能”全面讲解该算法,从Abaqus内部算法到数学问题中的非线性方程Newton-Raphson算法理论,最后结合具体非线性方程给出相应的代码,如此一来,更加生动地演绎Newton-Raphson迭代过程。
在Abaqus隐式求解时,将载荷划分为一定数量的增量步(increments)施加于结构,每个增量步结束时寻求近似平衡解,若干次迭代后才能获得最终平衡解。Abaqus/Standard组合了上述增量和迭代过程。
Abaqus/Explicit中,默认情况下时间增量步大小完全是自动选取。在求解非线性问题时,不需要形成切线刚度矩阵,需要的是一个小小的增量步,只依赖与模型的高阶自振频率,与载荷类型和加载时间无关,无需迭代即可获得解答。
增量步和迭代步:
Abaqus/Standard可以让用户指定初始增量步大小,后继计算过程中系统会自动选择增量步的大小,在每个增量步结束时,结构处于近似的平衡状态,将计算结果,写入到.odb文件中。
平衡迭代和收敛:
在第一个增量步载荷中,Abaqus/Standard基于结构的初始构形
和结构初始刚度
和
计算关于结构的位移修正值
,基于
将结构的构形更新为
。
在更新后的构形,形成新的切线刚度,进而计算新的内部作用力
,总载荷与内部作用力差值记为残差力:
线性问题中,残差力在模型每个自由度上均为 0 ,结构处于平衡状态。在非线性问题中,Abaqus/Standard将残差力与设定的容许值(容许残差)进行比较,若
小于容许残差值,则就是结构在所施加载荷下有效的平衡构形,除此之外,Abaqus/Standard还要检查位移修正值是否相对于总的增量位移
很小。若
大于增量位移的
,将进行下一次迭代。上述两个条件都满足后,才认为结果是收敛的。
默认的容许值在整个时间段上作用与结构上的平均力的。在整个模拟过程中,Abaqus/Standard会自动地计算平均力。
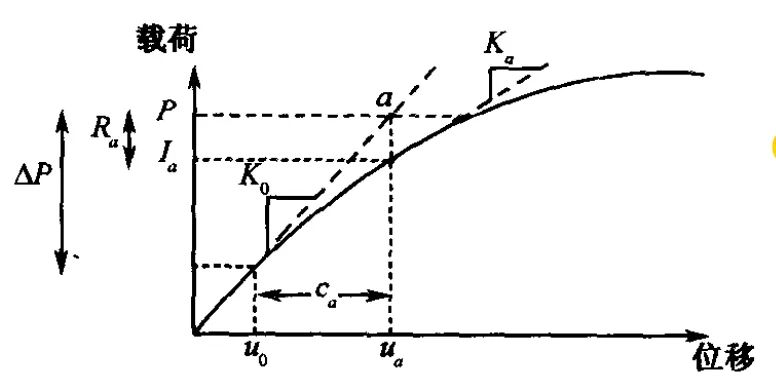
图 1:在一个增量步中的首次迭代(源自《ABAQUS非线性有限元分析实例》庄茁 P192)
Newton-Raphson(N-R)迭代法主要以分步逼近的方法计算,在每一增量步中,采用已得到的位移值带入并求得与位移有关的切线刚度矩阵的值,再进行线性计算,反复调整计算的载荷值与设定载荷值的差进行迭代,使其达到设定的精度。
Step 1:将总外载荷$\bar{P}$分为一系列的载荷段,
Step 2:在每个载荷段中进行循环迭代,直到在该载荷段内收敛。 每个迭代步中刚度方程为: 式中的
表示第
个载荷步。
Step 3:将所有载荷段循环迭代,并将结果累加。
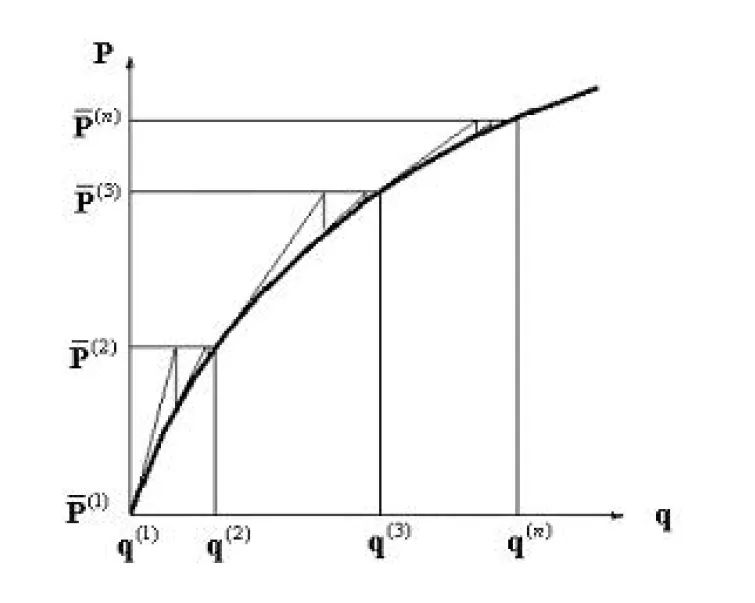
图 2:增量步循环迭代示意图
缺点:Newton-Raphson(N-R)迭代需要每次形成切线刚度矩阵,带来比较大的计算量,这也是隐式分析相对于显示分析计算时间大大增加的重要原因。
修正方法:在自己非线性有限元编程时,可以将上述迭代过程稍加修正,将每次迭代时的切线刚度矩阵换做初始切线刚度矩阵,并且在迭代时保持不变,即可大大减少计算量,修正方法如下图所示:
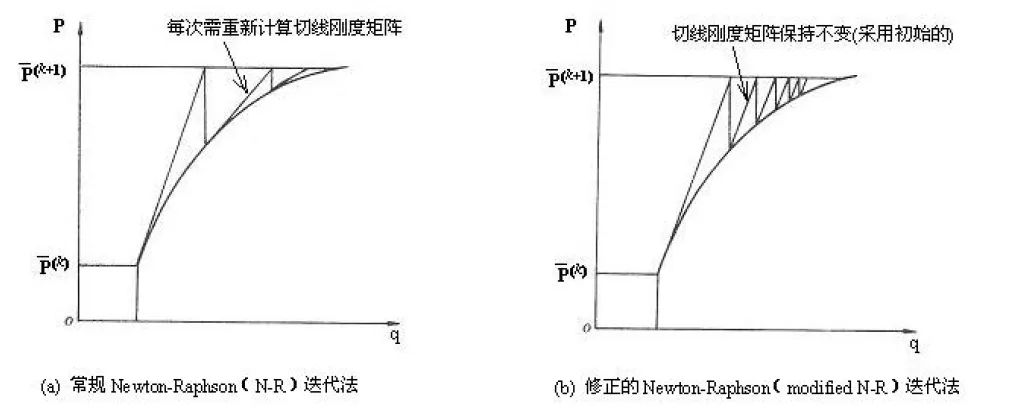
图 3:Newton-Raphson(N-R)迭代法与修正的 Newton-Raphson(N-R)迭代法
非线性方程的根记为 ,按照牛顿迭代法:
牛顿迭代计算流程:
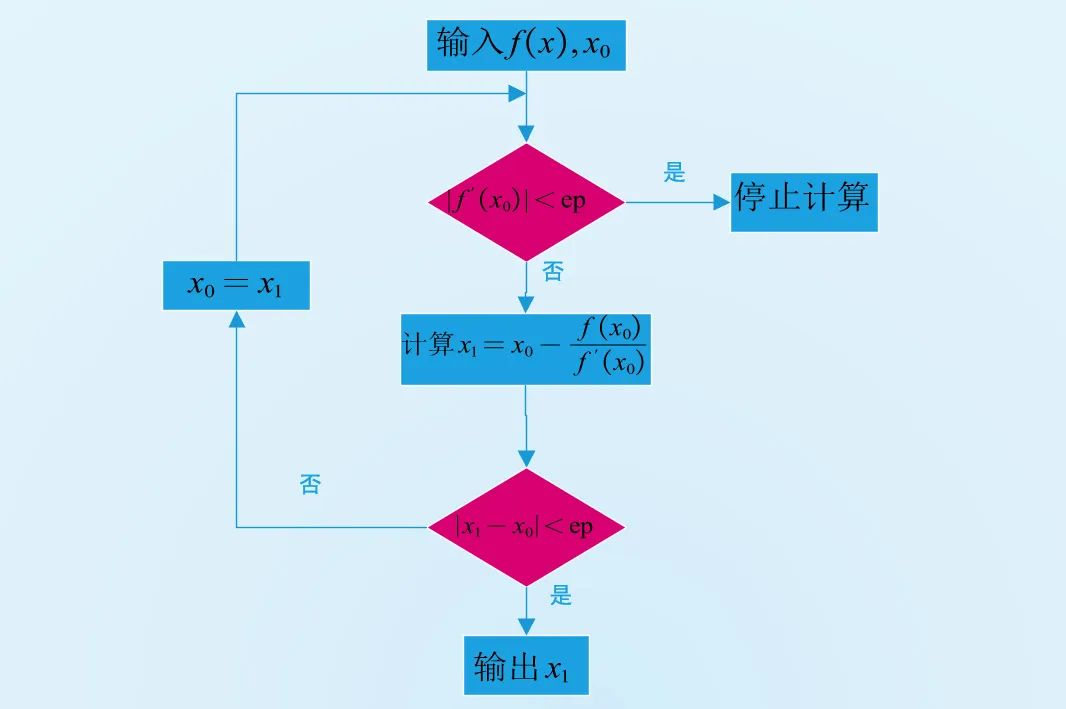
图 4:牛顿迭代法计算流程
Newton-Raphson迭代算法:
function varargout=newton(fun,x0,ep,maxiter)
% NEWTON 牛顿法求方程的根
if nargin<4
maxiter=500; % 默认最大迭代次数
end
if nargin<3
ep=1e-8; % 默认允许误差
end
if ~isscalar(fun)
dfun=fun{2}; % 导函数匿名函数形式
fun=fun{1}; % 函数的匿名函数形式
else
if isa(fun,'sym') % 函数以符号表达式的形式给出
dfun=matlabFunction(diff(fun)); % 导函数匿名函数形式
fun=matlabFunction(fun); % 函数的匿名函数形式
elseif isa(fun,'function_handle') % 函数以匿名函数或函数句柄的形式给出
dfun=matlabFunction(diff(sym(@(x)fun(x)))); % 导函数匿名函数形式
end
end
iter=1; % 迭代次数
xs(iter,1)=x0; % 迭代序列初始值
exitflag=1; % 迭代发散标志,1表示迭代收敛,0表示迭代发散
x1=nan; % 预置x1的初值
while exitflag
fx=fun(x0); % 计算x0处的函数值
dfx=dfun(x0); % 计算x0处的导数值
if abs(dfx)<=eps || iter>maxiter % 若导数为0或迭代次数大于最大迭代次数
exitflag=0; % 认为迭代发散,即根不可靠
break % 退出循环
end
x1=x0-fx/dfx; % 牛顿迭代计算
xs(iter+1,1)=x1; % 将迭代值依次存入迭代序列中
if abs(x1-x0)<=ep % 前后两次迭代值差的绝对值在允许的误差范围内
break % 跳出循环
end
x0=x1; % 更新迭代初始值
iter=iter+1; % 迭代次数累加
end
[varargout{1:5}]=deal(x1,... % 第一个输出参数为函数零点
fun(x1),... % 第二个输出参数为零点处的函数值及导数值
exitflag,... % 第三个输出参数为迭代收敛标志
iter,... % 第四个输出参数为迭代次数
xs); % 第五个输出参数为迭代序列例:利用Newton-Raphson算法求解函数在 3.8 附近的零点。
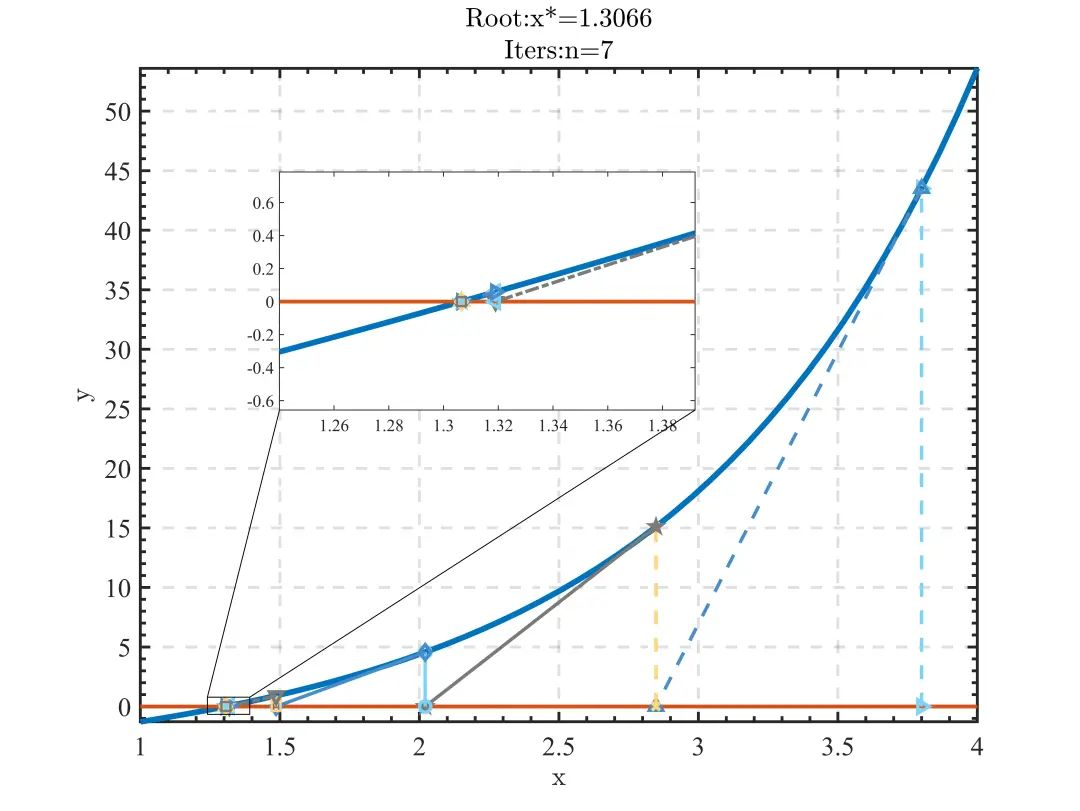
图 5:非线性迭代求解
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















