















































软件

产品


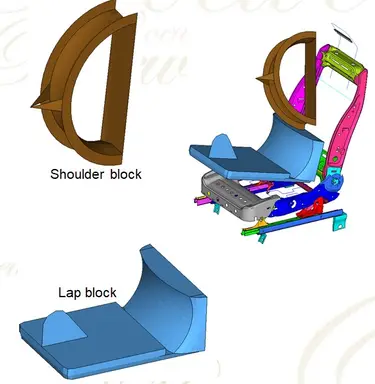
Shoulder block 和 lap block 为标准件,将它们导入,摆放于座椅前。(如图示)(请注意:具体的摆放位置和角度目前还不确定,这一部分内容需要进一步补充)
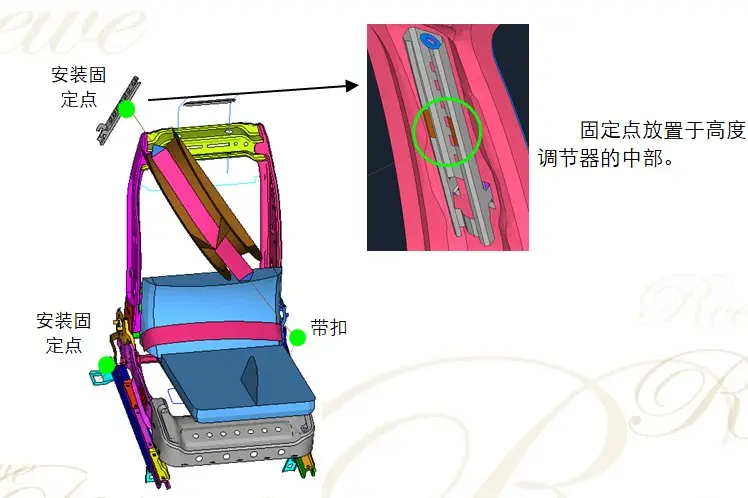
在 shoulder block 和 lap block 摆放好以后,就可以绕安全带了。通常的是三点安全带,我们需要得到以下三个点的位置。
1)绕肩部安全带
Hypermesh中:Tool-safety-Belt Routing. From node 和 to node 分别选择图示的安装固定点和带扣的点。设置响应安全带网格参数。

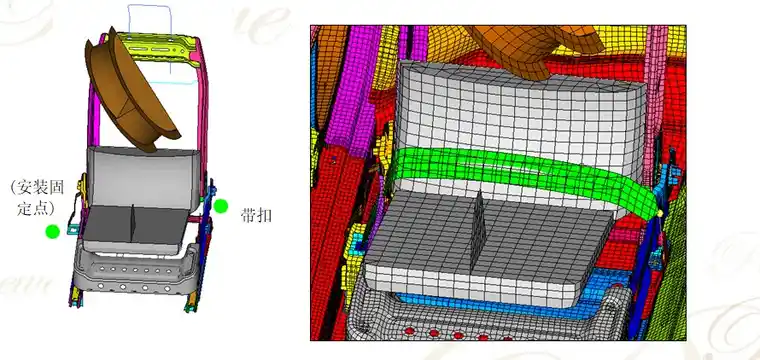
选择shoulder上的单元(安全带接触面)点击orient.,在肩部出现3条线段。点击线段,将其激活,此时可以拖动。分别调整这三条线段以使安全带处于合适的位置。


2)绕腰部安全带
腰部安全带的绕法和肩部类似,不再详述。
3)安全带调整及属性设置
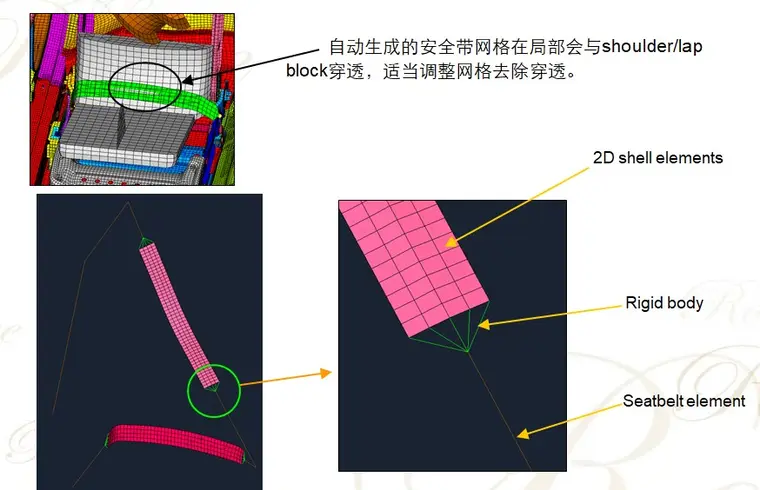
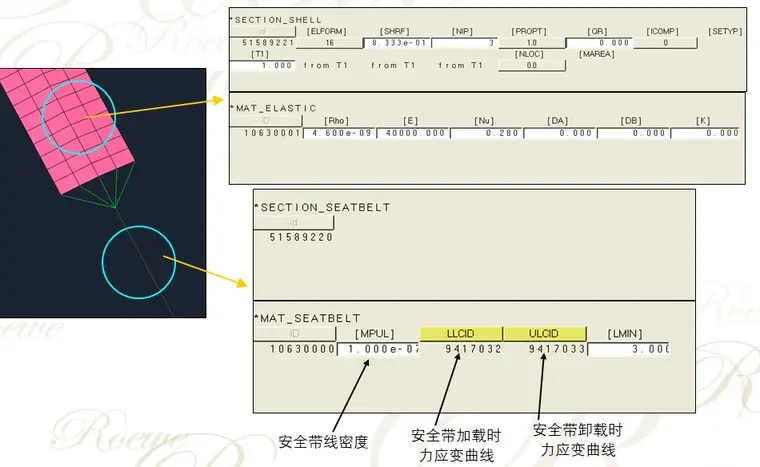
请注意这种安全带的设置方法有不合理的地方,因为2D单元和seatbelt单元的长度比影响了安全带的伸缩量。有必要进一步完善安全带的设置方式。建议全长使用seatbelt单元,在与肩部和腰部接触的区域使用与安全带单元重合的刚度较弱的2D单元(用于定义接触)。

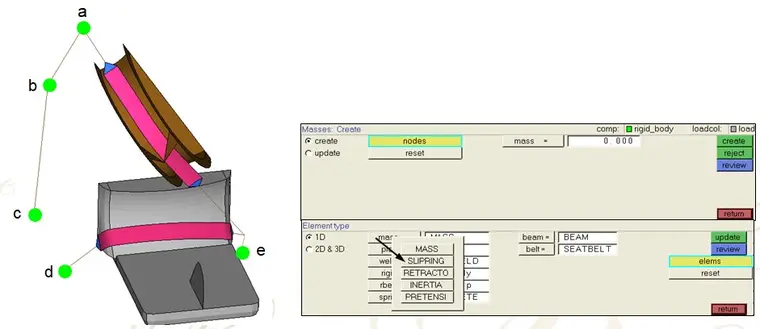
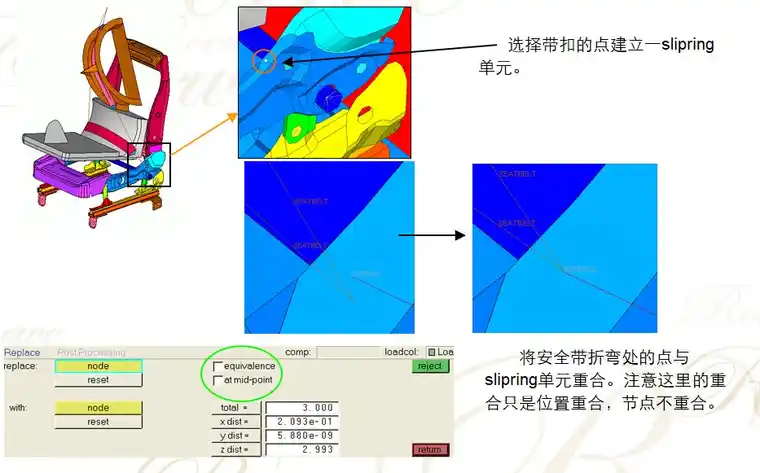
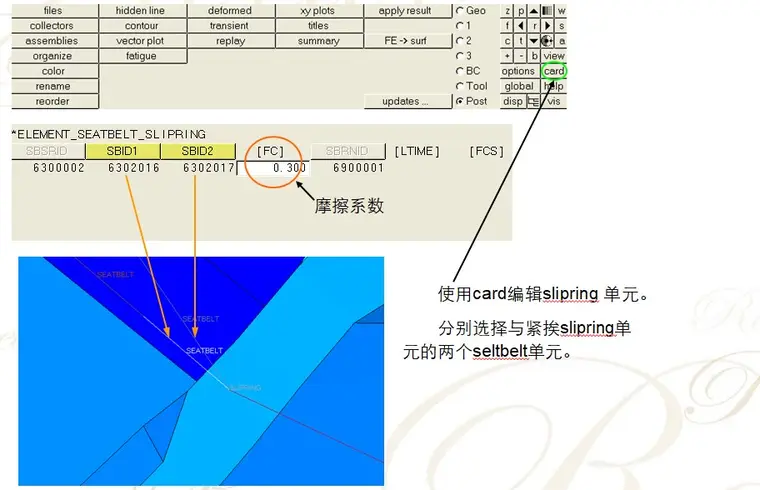
这里的5个连接点中,c d 两点与车身为固接,seatbelt节点与车身相连即可。a b e 三点 为安全带的折弯点,安全带可以滑过折弯点。Dyna中采用slipring单元(滑轮)来模拟这三个点的连接,Slipring 属于点单元,hypermesh中通过mass面板来建立。 须将单元类型设置为slipring。
通常整车碰撞模型接触已经设置好,为了保证模型的整洁,可以删除所有之前所定义的接触,然后重新定义机构强度分析所需的接触。几个需要定义的接触如下:
1)座椅地脚与车身。除螺栓连接传力以外,地脚与车身的接触也传力,地脚与车身的接触必须设置。
接触类型选择 surface to surface 或者 single surface 都可以。在使用surface to surface接触时slave 最好选择座椅地脚。
2)安全带与block的接触,block之间的接触,使用surface to surface 类型。

3)block与座椅的接触,使用surface to surface 类型。
4)定义座椅自身接触,使用single surface类型。
5)定义车身零件之间的接触,使用single surface.
计算过程中越多的接触会使得收敛困难(implicit),增加计算时间。在定义座椅和车身自身接触时远离地脚受力的区域和远离大变形可能发生的区域可以不定义接触。
设置接触后,零件之间会有可能发生接触的穿透(penetration)。 可以通过Penetration Check的工具,调整这些穿透。

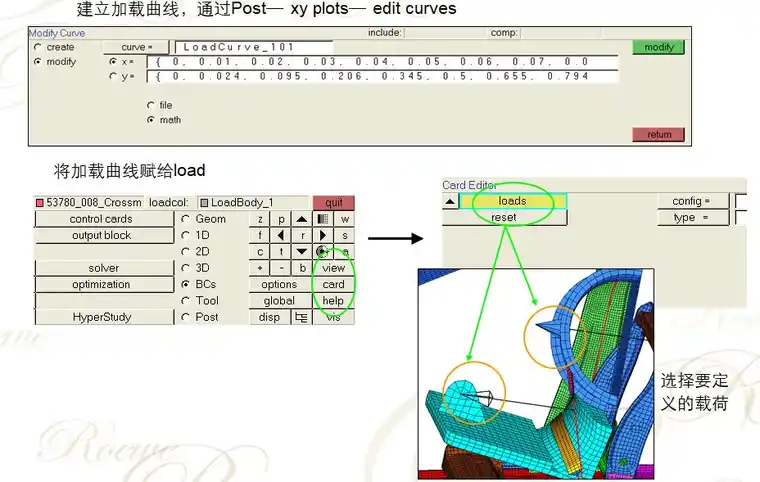
因为加载时座椅变形较大如果用implicit求解,容易引起收敛困难。所以采用explicit求解。加载曲线如下图:


免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















