















































软件

产品


机器人结构优化设计
摘要:本文首先通过CREO软件建立机器人模型,然后通过Hypermesh对模型进行网格划分和有限元分析,采用Optistrut对该模型进行拓扑优化,使得优化后的结构模型满足设计要求的结构方案。
关键词:机器人 拓扑优化 Optistrut 变密度法
一、 模型介绍
机器人总成的材料以钢为主,其结构主要由底座、臂座、臂座板、舵机、连接体、爪座板、爪座、爪子和圆台等部分组成。通过三维软件CREO对该机器人进行建模,其建模结果如图1.2所示。

图1.1 机器人模型
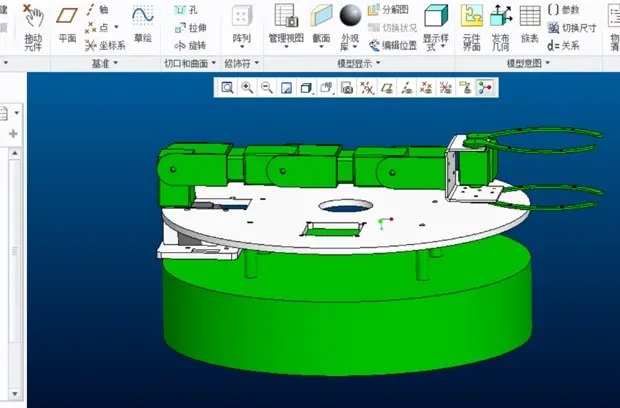
图1.2 机器人模型装配图
二、Hypermesh有限元分析
将装配之后的模型图利用CREO另存为.stp格式,然后用Hypermesh的Import导入,如图2.1所示。
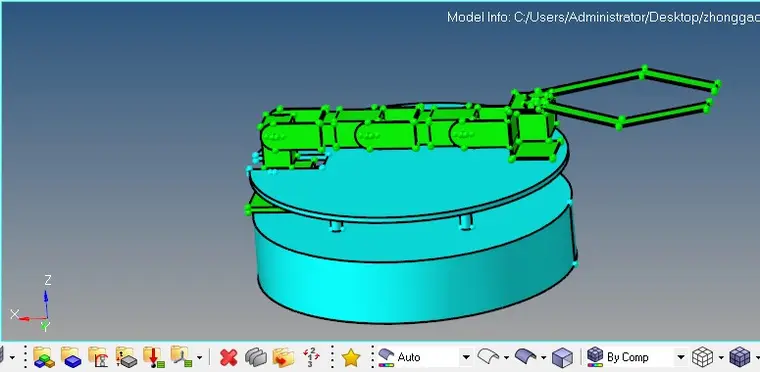
图2.1 导入Hypermesh的装配图
导入装配图之后,画网格之前,要先对模型进行检查和清理,为画网格清除障碍。将模型处于topo模式下,看到所有的线都是绿线,说明模型是完整的,可以画网格。
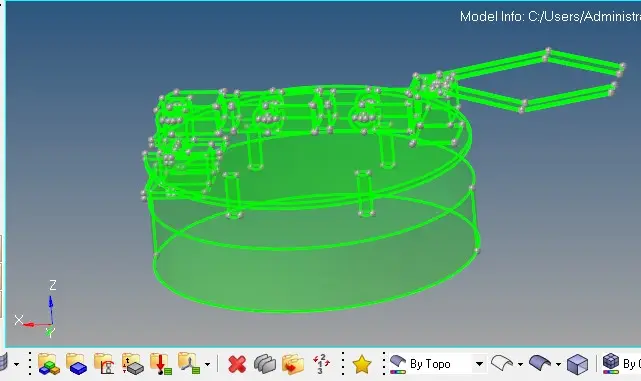
图2.2 Topo模式下的模型图
设置梁单元,点击BeamSection Collectors,建bar层,元件连接效果图如图2.3所示。
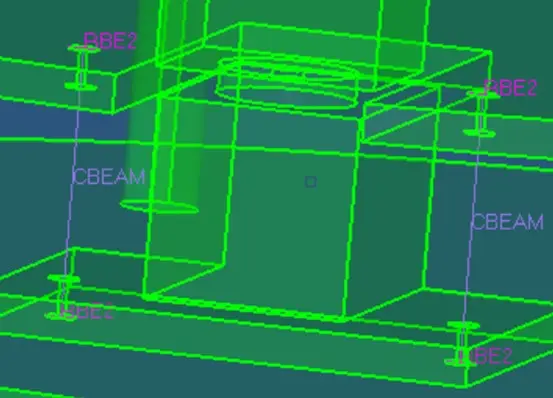
图2.3连接图
有限元分析过程如下:
1)网格划分
底座和圆台属于不太重要的部分,选择四面体网格,点3D→ tetramesh→element size为 20→interpolate;机械臂部分同样的操作步骤,将element size改为5;网格总数为32270。网格划分结果如图2.4所示。
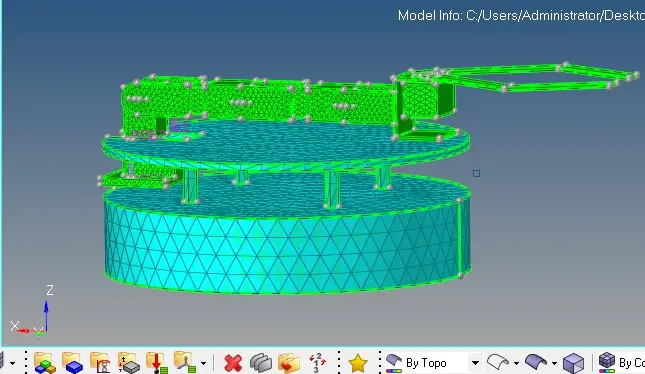
图2.4 机械臂网格图
2)选择材料,点击Materials图标,设定参数如图2.5所示。
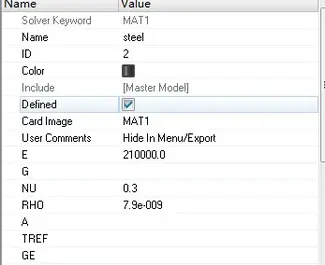
图2. 5 材料参数设置图
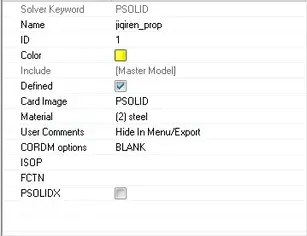
图2.6 属性设置参数图
3)设置属性,点击Properties,设置如图2.6所示。
4)把属性赋给零件,点击Components,然后点assign。
5)加约束条件spc,点击Analysis中的constraints,进行设置,如图2.7所示。
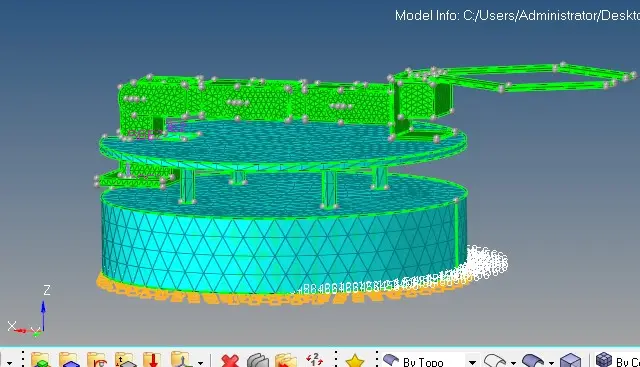
图2.7 约束条件设置图
8)设置力force,点击Analysis中的forces,进行力的加载10N,如图2.8所示。
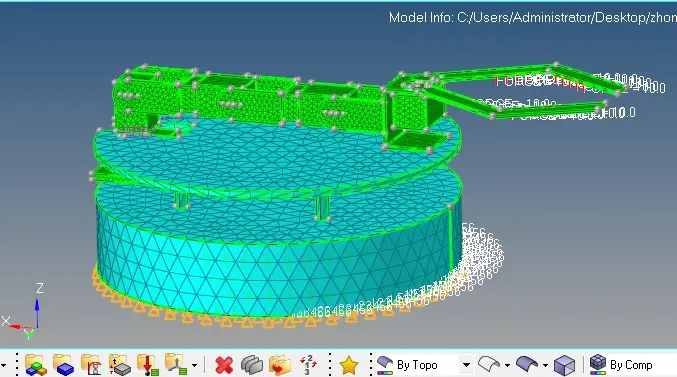
图2.8 加载荷设置图
9)点击Analysis中的loadsteps,设置工况。
10)求解。
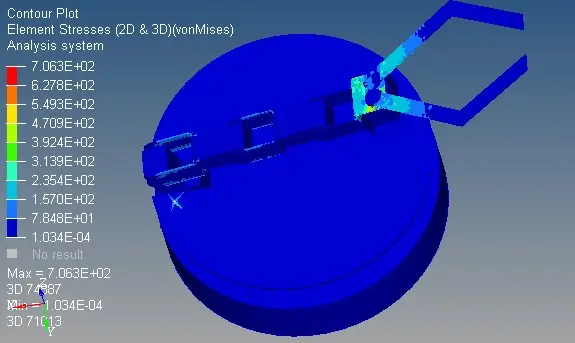
图2.9 应力云图
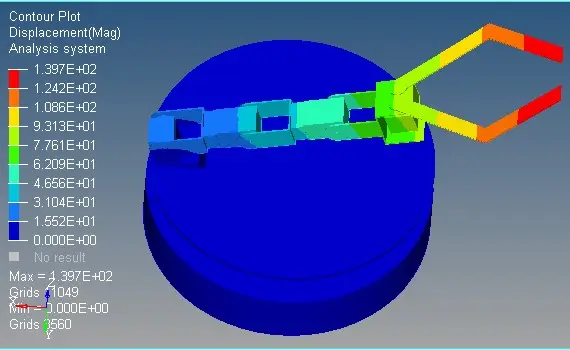
图2.10 位移图
三、拓扑优化
1)在optimization面板下,选择topology,创建一个设计变量,类型选择PSOLID,属性选择(3)中创建的属性;
2)在responses面板下,创建一个static displacement位移响应,node选择在第二节中(3)中的节点,并选择dof3,即在z方向的响应;同样,创建一个volume总的体积响应;
3)在dconstrains面板下,约束(2)中的位移响应,在upper bound栏打钩,设置数值为0.01379,response选择Disp,载荷步选择第二节中(8)中创建的载荷步,完成约束创建;
4)在objective面板下,response选择(2)中创建的体积响应,设置为min最小化;
5)求解完成后,即可查看优化结果,首先查看右端节点位移是否满足(3)中的约束要求如图3.1所示。
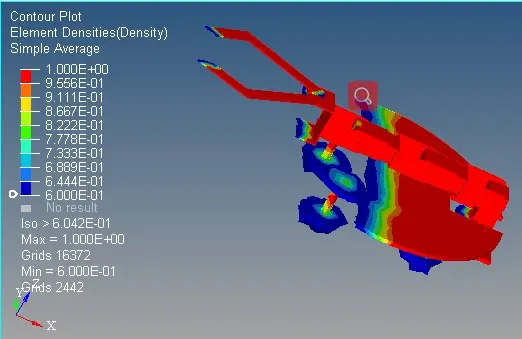
图3.1 优化之后模型
与优化之前的模型对比,机器人的大底座可以简化为与四根柱子连接在一起的独立支柱;云台的平面面积可以减少1/3左右;可以大大的减少机器人整体的质量,并满足设计的要求。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















