















































软件

产品


使用基于弹簧的光滑和网格重网格运动方法来更新变形区域的体网格。对于三角形或四面体网格的区域,基于弹簧的平滑可以根据已知的边界节点的位移来调整内部节点的位置。基于弹簧的平滑方法在不改变网格连接性的情况下更新了体网格。
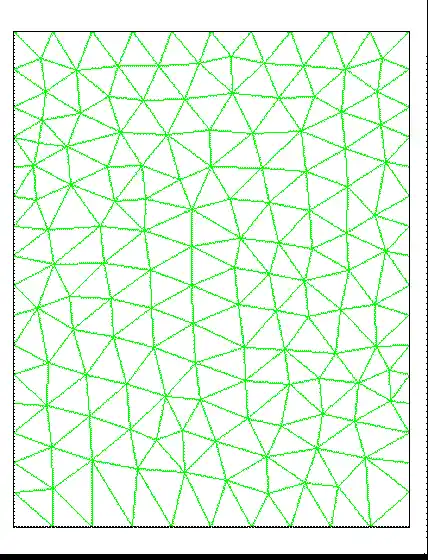
但是,当边界位移相对于局部网格尺寸较大时,网格质量可能恶化或退化。更新网格后,会导致收敛问题。为了避免这个问题,FLUENT的网格重构算法可以将劣质网格(太大、太小或拉伸过度的网格)聚集在一起,并在局部重新自动划分网格。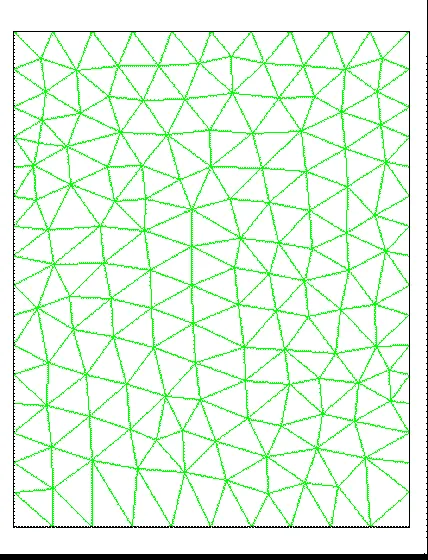
在弹簧光滑模型中,网格的边被理想化为节点间相互连接的弹簧。移动前的网格间距相当于边界移动前由弹簧组成的系统处于平衡状态。在网格边界节点发生位移后,会产生与位移成比例的力,力量的大小根据胡克定律计算。
边界节点位移形成的力虽然破坏了弹簧系统原有的平衡,但是在外力作用下,弹簧系统经过调整将达到新的平衡,也就是说由弹簧连接在一起的节点,将在新的位置上重新获得力的平衡。原则上弹簧光顺模型可以用于任何一种网格体系,但是在非四面体网格区域(二维非三角形),网格更容易畸变。在系统缺省设置中,只有四面体网格(三维)和三角形网格(二维)可以使用弹簧光顺法。
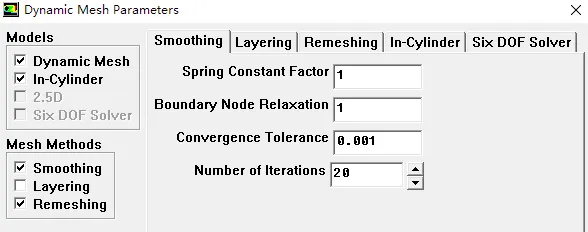
在其他网格类型中使用需要在TUI界面iain激活该模型。激活弹簧光顺模型,相关参数设置位于Smoothing标签下,可以设置的参数包括Spring Constant Factor(弹簧弹性系数)、Boundary Node Relaxation(边界点松弛因子)、Convergence Tolerance(收敛判据)和Number of Iterations(迭代次数)。
弹簧弹性系数应该在0 到1 之间变化,弹性系数等于0 时,弹簧系统没有耗散过程;在弹性系数等于1 时,弹簧系统的耗散过程与缺省设置相同。边界点松弛因子用于控制动边界上网格点的移动。当这个值为零时,边界节点不发生移动;在这个值为1 时,则边界节点的移动计算中不采用松弛格式。收敛判据就是网格节点移动计算中,迭代计算的判据。迭代次数是指网格节点移动计算的最大迭代次数。
当运动边界的位移远远大于网格尺寸,弹簧光顺模型可能导致网格质量下降,甚至出现体积为负值的网格,或因网格畸变过大导致计算不收敛。FLUENT 采用重新划分局部网格的方式解决上述问题。
首先将需要重新划分的网格识别出来,使用评估的网格畸变率和网格尺寸,在限定值范围内,则标志为需要重新划分的网格。局部重划模型仅能用于四面体网格和三角形网格。
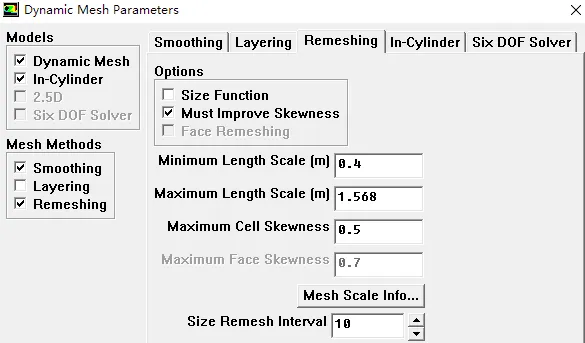
在Remeshing标签下,设置与局部重划模型相关的参数。可以设置的参数包括Maximum Cell Skewness(最大畸变率)、Maximum Cell Volume(最大网格体积)和Minimum Cell Volume(最大网格体积),其含义如前所述,主要用于确定哪些网格需要被重新划分。
在缺省设置中,如果重新划分的网格优于原网格,则用新网格代替旧网格;否则,将保持原网格划分不变。
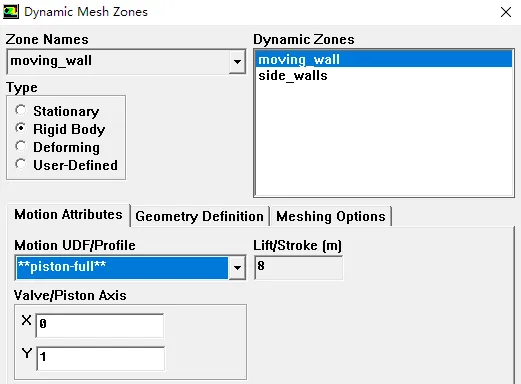
在本次计算中还选择使用In-cylinder(活塞)模型,指定Crank Shaft Speed(曲柄速度)、Starting Crank Speed(曲柄起始速度)、Crank Period(曲柄周期)以及Crank Angle StepSize(曲柄角度时间步长)等参数后,可以使用FLUENT内建函数用于计算活塞的实时位置,用于控制运动边界。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















