软件

产品


1接触问题全局求解方案
在有限元分析中,通常得到以下形式的全局方程组
式中,P为结点载荷列阵。
对于接触问题,约束不等式一般可表示为如下形式
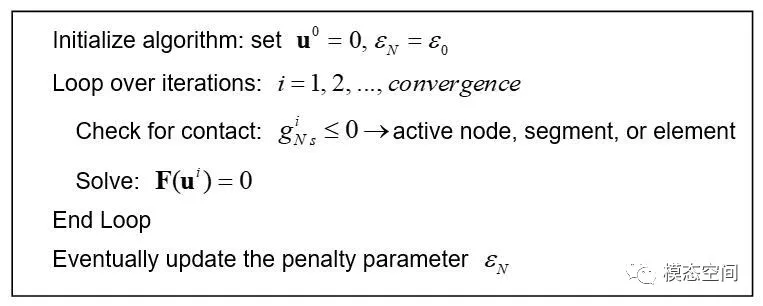
1.1 罚函数法
罚函数法不增加问题的自由度,而且使求解方程的系数矩阵保持正定,所以得到了广泛的应用。罚函数法给出以下形式的求解方程:
其算法流程可概述如下:
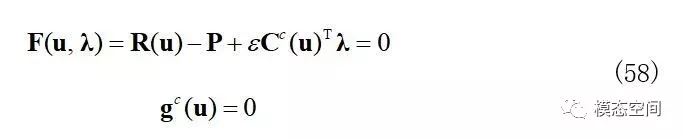
1.2 拉氏乘子法
拉氏乘子法是另外一种得到广泛应用的接触算法。该方法能够精确满足接触约束条件,但增加了额外的未知量,即拉格朗日乘子。拉氏乘子法给出的求解方程为
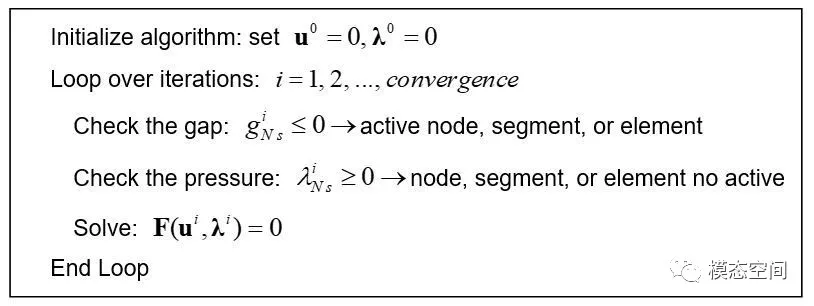
以下给出拉氏乘子法的简要计算步骤:
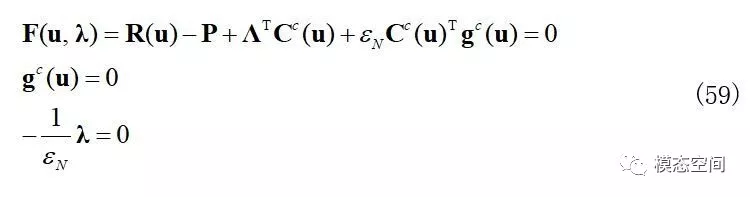
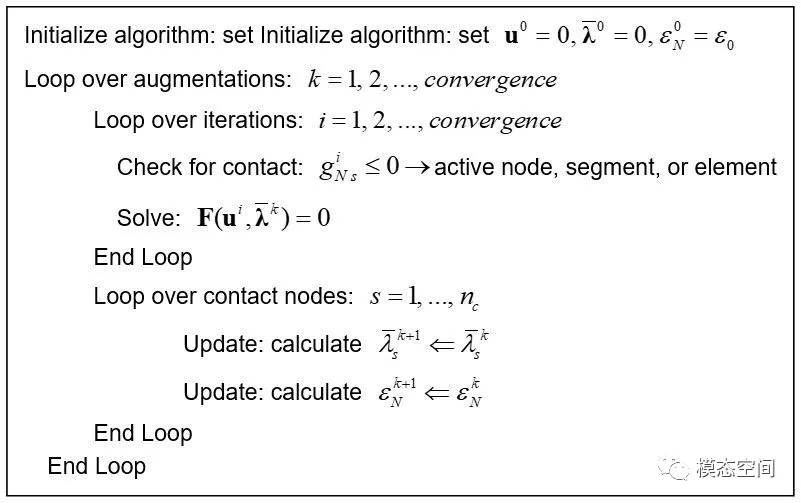
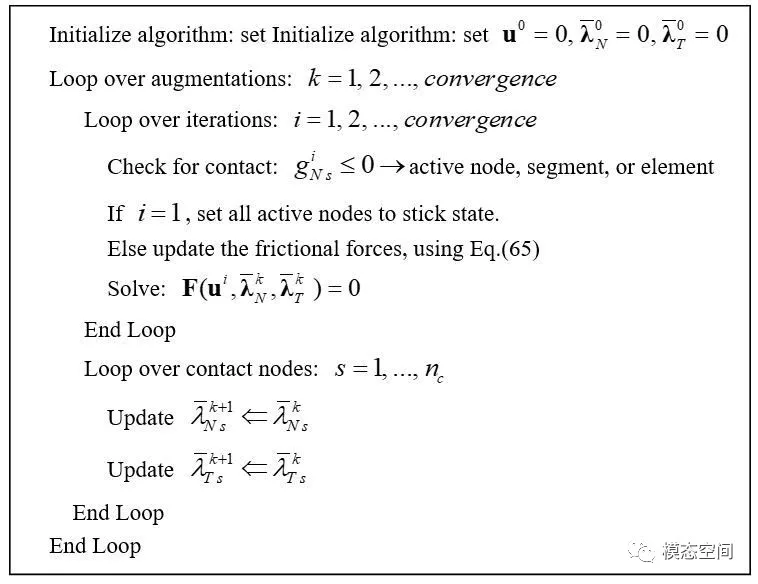
1.3 增广拉格朗日法
增广拉格朗日法通过对于罚函数形势相组合的拉格朗日乘子的更新,获得了罚函数法和拉氏乘子法之间的折中方式。该算法的求解方程形式为
该方法通常与Uszawa类型的循环迭代相结合使用,采用嵌套两重循环,分别用于计算接触和更新拉氏乘子。算法流程如下:
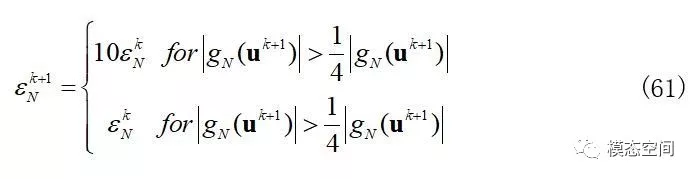
增广拉格朗日法通过应用下面二式来更新拉氏乘子和罚参数
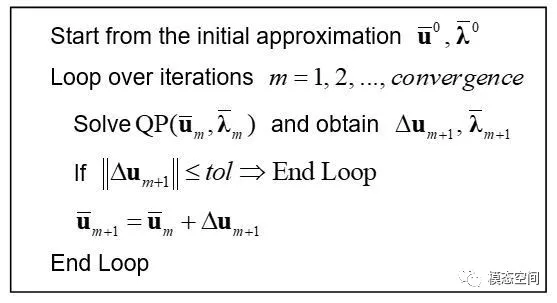
1.4 连续二次规划法
连续二次规划法采用牛顿型或者准牛顿型方法来求解接触问题的Kuhn-Tucher条件。该方法中,将与接触问题等价的不等式约束最优化问题
利用二次近似转化为一系列二次规划问题
式中,(ū,ƛ)代表迭代求解过程的一个已知状态,即本次迭代开始时的位移和拉氏乘子的初始值,Δu是位移的增量。
连续二次规划法的基本流程如下:
2摩擦的全局算法
对于摩擦情况,需要区分粘接和滑动两种状态。粘结状态相当于切向位移约束,摩擦力即界面上的约束反力。与此相反,在滑动状态下,摩擦力需要根据界面上的切向滑移本构关系确定。
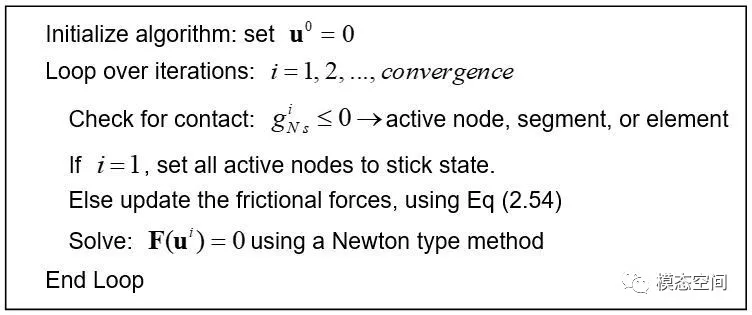
2.1 罚函数法
罚函数法构建的摩擦接触问题的求解方程可表示如下,
其中,tT(u)为摩擦力矢量。在tn+1时刻,粘结或滑动状态的摩擦力由下式给出
式中,aT为相对滑动速度的方向矢量。
根据以上列式,可以建立求解摩擦接触问题的算法。对于总体求结果中的一个载荷增量步,罚函数法的算法流程可概括如下。
以上处理摩擦的流程也可用于拉氏乘子法接触求解。拉氏乘子法一般仅用于处理法向接触约束,对于切向摩擦,仍可使用式(2.54)描述的界面本构关系来处理。
2.2 Uszawa算法
基于增广拉格朗日法的Uszawa型算法,也可用于摩擦的处理。该种算法在切向也引入一个拉氏乘子。所形成的求解方程如下:

Uszawa型算法求解摩擦接触问题的流程如下:
3小结和一些现实的考虑
基于变分等式的接触算法,如拉氏乘子法、罚函数法、直接约束法、增广拉格朗日法等,这些变分等式算法首先假定接触界面已知,然后设法在接触面上施加等式约束,因此在计算中需要进行接触探测和判断来确定接触界面的具体范围。而基于变分不等式的算法,如连续二次规划法、内点法等,则是建立在最优化理论基础上,将接触问题描述为一个不等式约束最小化问题,然后采用优化方法进行求解。
目前拉氏乘子法、罚函数法和增广拉格朗日法接触算法已经得到了广泛的应用,而基于最优化理论的接触算法在工程中应用的较少。但是后者有可能在数值稳定性和计算精度方面具有优势。
接触的空间搜索和探测判断是计算接触力学中的关键问题。目前的空间搜索技术已经可以使搜索时间减少到O(NlogN)量级。在接触探测方面,也已经发展了多种方法,但是在有限滑动情况下,变形体之间的接触探测难度很大,仍需要研究更加有效的技术。
为克服经典库伦摩擦定律的不连续性,可以对其规则化,从而得到更加光滑的摩擦本构曲线。规则化的摩擦模型可以类比弹塑性本构关系,建立相应的屈服准则和流动法则,然后采用弹塑性理论中的返回映射方案来计算摩擦力。
原则上,各种有限单元都可用于接触分析中,但实际计算中通常采用低阶单元。因为高阶单元会导致等效结点接触力在角结点和边结点之间的振荡,对于接触状态的校核和判断极为不利。为此,一种改进的办法是采用变结点单元,例如在二维问题中改用在接触面上不保留边中结点的7结点单元。另一种替代方案就是采用4结点双线性单元,该单元能够描述较大的形状变化,而且计算效率较高,故在实际分析中较多地采用。但是在积分方案上要注意防止机动模式和剪切锁死的发生,特别是对于板壳单元更应注意。
虽然拉氏乘子法和直接约束法能够完美的描述不可侵入条件,但对于汽车车身这种复杂的模型并不是非常合适。拉氏乘子法和直接约束法相当于用主控表面的节点来约束从属表面的节点,如果从属表面的节点恰好也是某些刚性单元(例如Abaqus中的*KINEMATIC COUPLING、*COUPLING和*MPC以及Nastran中的RBE2和RBE3 )的从节点,则相当于该从节点同时被两个主节点控制,导致求解器报错。如果从属表面施加了某些运动约束,这些约束也经常会与接触约束发生冲突,导致无法求解。
罚函数法虽然只能近似满足不可侵入条件,界面上将有少量的相互贯入产生,但罚函数法本质是在两个表面的节点之间增加非线性弹簧,非线性弹簧的两个端点实质上并没有主控和从属的区分,所以罚函数法与各种刚性单元和各种运动约束条件可以兼容,最适合有复杂连接关系的模型。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020