软件

产品


接触问题在工程中处处可见,例如汽车车轮与地面的接触、齿轮齿合、滚珠轴承、管道法兰、螺栓连接、铆钉连接、以及在金属板冲压成型过程中薄板与模具的接触,摩擦以及滑动过程均是接触非线性问题。
求接触问题常用方法有:有限元法,边界元法,数学规划法以及形状优化法。其中,有限元法是分析接触问题最有效的方法之一。
对于两个弹性接触体,把他们进行有限元离散,可得其整体平衡方程:
K1δ1=F1
其中,K1是对应于某种接触状态,反映接触条件的刚度变化矩阵。显然,它是随着接触状态的变化而变化的。δ1是节点位移向量。F1是节点力向量。上式变形后得:
δ1=F1 K1 -1
求出节点位移δ1以后,再求出接触点的接触内力R1。然后将δ1和R1代入对应接触状态的接触条件中,如果不满足接触条件,再进行下一次迭代。按照这样循环进行下去,经过几次循环后,当δn和Rn满足接触条件时,这时的解答就是所需要的真实接触状态。
接触过程通常是依赖于时间,并伴随着材料的非线性演化过程。特别是接触界面的区域和形状以及接触面上的运动学和动力学的状态也是前所未知的。这些特点决定了接触问题通常采用增量法进行求解。大变形条件下的虚位移原理,采用完全拉格朗日法和更新的拉格朗日法增量求解大变形问题的方法和弹塑性有限元问题的求解方法,同样适用于接触问题的求解。
接触条件都是不等式约束,也称为单边约束。另外,由于接触面的范围和接触状态也是事先未知的,接触问题只能通过迭代法求解。每一增量步的迭代过程可以归纳如下: 1)根据前一增量步的结果和当前增量步给定的载荷条件,通过接触条件的检查和搜索,假设此增量步第一迭代步求解时的接触面区域和接触状态; 2)根据上述接触区域和接触状态的假定,将接触面上的不等式约束改为等式约束作为定解条件,引入方程,并对方程进行求解; 3)利用接触面上的接触结果与假定的接触状态进行对比。如果接触面上每一点都不违反假定状态,则完成本增量步的求解。否则,修改接触状态,回到步骤2)进行下一次迭代求解。
本为是利用ABAQUS模拟无摩擦接触问题,故下面对无摩擦弹性接触问题的一般有限元方法做说明。
当由两个弹性接触物体所组成的系统处于平衡状态时,根据虚功原理,分别给出两个物体的离散平衡方程:
式中KⅠ,KⅡ是指物体Ⅰ和物体Ⅱ的系统刚度矩阵;dⅠ,dⅡ是两物体的节点位移;FⅠ,FⅡ是作用在物体上的外力等效节点力;
由于接触力等效节点力
对于无摩擦问题,首先假设各接触点对的接触状态,并代以相应的接触定解条件。引入接触定解条件后,可由离散平衡方程求出节点位移,进而可以求得接触点对上的接触力矢量。然后,根据接触点对的位移和接触力向量,依次按接触判定条件判定各点对的接触状态是否和假定的接触状态相符。如果不相符,则重新修改接触状态,再次迭代分析。经反复迭代计算,直到某次迭代计算前后接触状态完全一致。
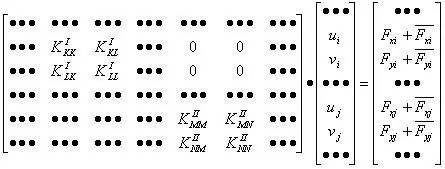
以平面分析为例,假设物体Ⅰ上的节点i和物体Ⅱ上的节点j构造接触点对,系统的平衡方程为:
其中K=2i-1,L=2i,M=2j-1,N=2j;Fxi,Fyi和Fxj,Fyj分别为节点i和节点j外载荷等效节点力;

采用罚函数法引用约束
式中,λ为罚函数,可取任意大于0的数,为避免大数吃小数的现象,一般取
当前通讯设备产品的市场竞争日趋激烈,各个通讯厂商为了能够在全球激烈的竞争中生存并发展壮大,尽可能采取一切办法来降低成本,其中降低生产成本(包括原材料成本、加工成本、装配成本等)占有主导地位。
本文模型取材于通讯设备数据产品中风扇支架零件和盒体组件之间的装配过程,其中风扇支架用来固定散热风扇,盒体用于封装电路板模块、电源模块以及各种数据接口等零件。
在装配线上用空心铆钉通过拉铆工艺将风扇支架固定在盒体上。这种铆接工艺的原理是通过一个空心铆钉分别于风扇支架、盒体底板进行过盈装配,将两个零部件装配在一起。
现在这种铆接(包括压铆、涨铆以及拉铆等)加工工艺非常流行,尤其在大批量装配过程中其效率非常高,其特点是装配后的两个或多个零部件一般都不受力或者受力不大,其和螺栓装配有本质区别。
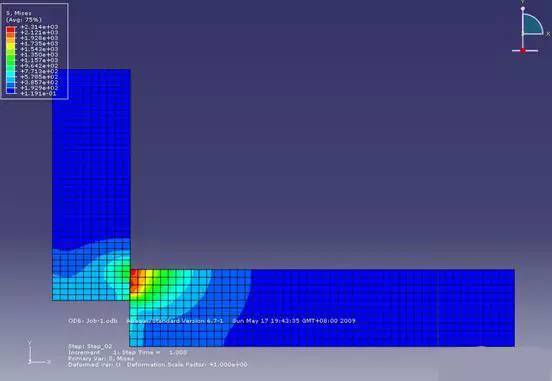
简化后的接触模型如图1所示,共由三个部件组成,分别为支架、销钉和铆钉。
图1
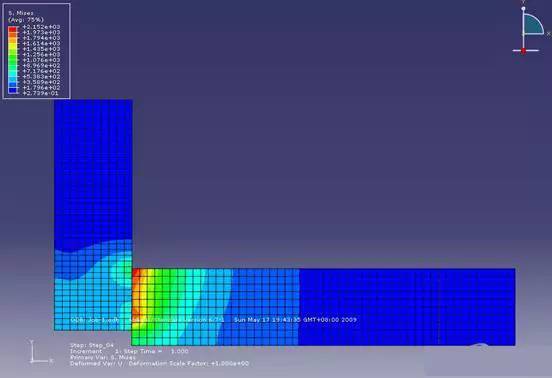
为了节省计算资源,本案例采用二维模型进行分析。采用三个分析步,每个分析步铆钉向下位移0.2mm,径向过盈量为0.05mm,所有接触均为无摩擦接触。图2、图3、图4分别为3个分析步的结果,其中显示的是Von mises应力。
图2
图3
图4
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020