软件

产品


例:弹簧串联受外力作用,具体数值如下图所示,求:a)总刚;b)节点2与节点3的位移;c)节点1的反力;d)弹簧内力。
一、有限元法求解
步骤1:离散化
| 单元 | 节点i | 节点j |
| 1 | 1 | 2 |
| 2 | 2 | 3 |
步骤2:写单刚
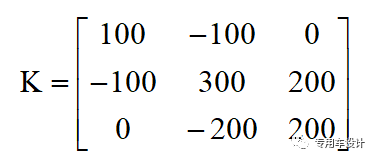
步骤3:写总刚
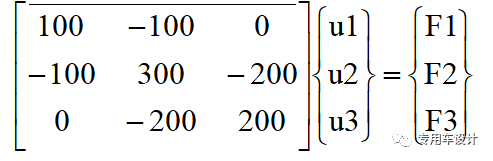
步骤4:边界条件
本例中,u1=0,F2=0,F3=1000N,代入上述方程
步骤5:求方程,解u2和u3
利用上述方程不难解出u2=10m,u3=15m,具体不再赘述。
步骤6:后处理,求节点1反力F1与弹簧内力f1、f2
取出相应的方程可求得F1=-1000N,f1=1000N(拉),f2=1000N(拉)。
二、python求解
import numpy as np
# 离散化
ele_node = np.array([[1, 2], [2, 3]])
node_coord = np.array([0, 1, 2])
# 计算单刚
dimen = 1 # 1d
k1 = 100
k2 = 200
def fun(K):
Ke = np.array([[K, -K], [-K, K]])
return Ke
# 总自由度数
ndof = dimen * len(node_coord)
# 外力向量
F = np.array([0, 0, 1000])
K = np.array([k1, k2])
# 初始化总刚
K_t = np.zeros((ndof, ndof))
# 计算总刚
for e in range(0, len(ele_node)):
n1 = ele_node[e][0] - 1
n2 = ele_node[e][1] - 1
K_t[np.ix_([n1, n2], [n1, n2])] += fun(K[e])
print(K_t)
# 解u2和u3
k=K_t[1:3, 1:3]
f=F[1:3]
k=np.mat(k)
f=np.mat(f)
u=k.I*f.T
print(u)
# 解支反力F
u=np.mat(u)
U=np.r_[[[0]],u]
U=np.mat(U)
F=K_t*U
print(F)
# 解内力
u1=U[0:2]
u2=U[1:3]
f1=fun(k1)*u1
f2=fun(k2)*u2
print(f1)
print(f2)
计算结果如下图
三、Abaqus求解
步骤1:离散化
步骤2:创建弹簧单元、施加边界条件
步骤3:求解,后处理
结果:
1.整体刚度矩阵如下图:
2.节点2位移u2=10m,节点3位移u3=15m,如下:
3.节点1的支反力F1=-1000N,如下:
4.弹簧单元内力均为1000N,如下:
结论:
不难发现,手工计算、python计算、Abaqus计算结果完全一致。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020