















































软件

产品


显示动力学算法:中心差分法
显式优点:增量步小求解效率高(短时);易模拟接触和不连续情况的分析
下面以轧制成形的例子进行讲解
前处理:
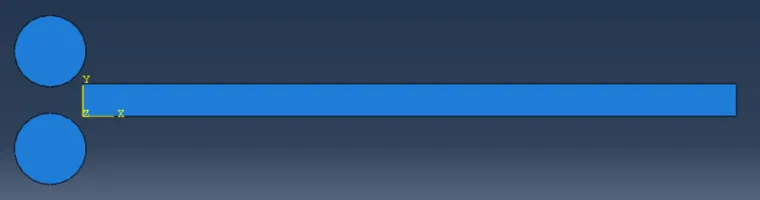
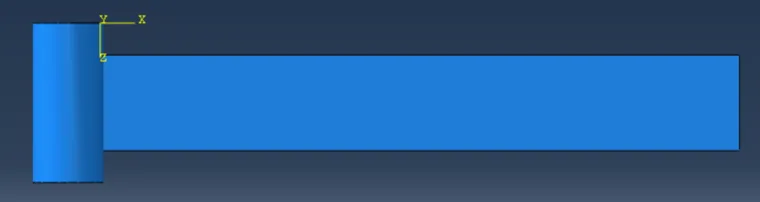
1.模型构建:模型相对简单,自行构建
2.材料参数定义(实际材料参数根据实际检测创建):
密度:7.85e-9;
弹性本构参数:杨氏模量:2.1e5MPa,泊松比:0.3
塑性本构参数:
| 屈服强度 | 200 | 340 |
| 塑性应变 | 0 | 0.2 |
3.网格系统构建:包括装配、网格划分和指定单元类型
装配:
网格划分:
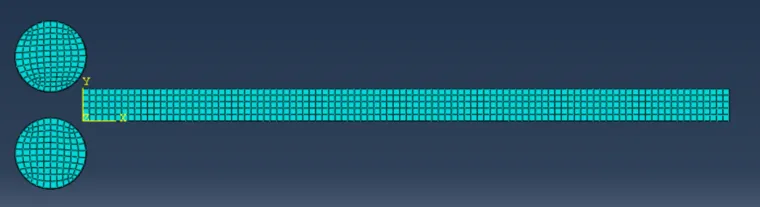
轧辊采用中性轴算法进行网格精度的控制,网格划分结果如上图。
单元类型:C3D8R
至此,前处理部分全部完成。
求解:
1.求解器设定
1)求解器采用显式动力算法:Dynamic,Explicit
多载荷步分析:
Step1:轧板的送料(0.001s)
Step2:轧板轧制成形(0.01s)其他保持默认
2)设置场输出和历史输出:
场输出:step2的频率调整为50(即一共输出50帧),与隐式不同
历史输出:保持默认
2.连接关系设定
接触设置为通用接触即软件自行判定,也可设置为面-面接触
接触属性:切向摩擦系数为0.3,法向为硬接触
约束:设置参考点并与轧辊设置为刚体约束
3.边界条件设定
位移(约束):step1释放轧辊的转动自由度,板料通过强制位移送入;step2中轧辊添加转速,轧辊的位移释放
载荷(载荷):step2对板料施加压力(压下量太大,仅靠摩擦会打滑导致无法继续轧制)
至此,求解过程结束。
本次模拟仅供参考,具体问题需具体分析。
后处理:
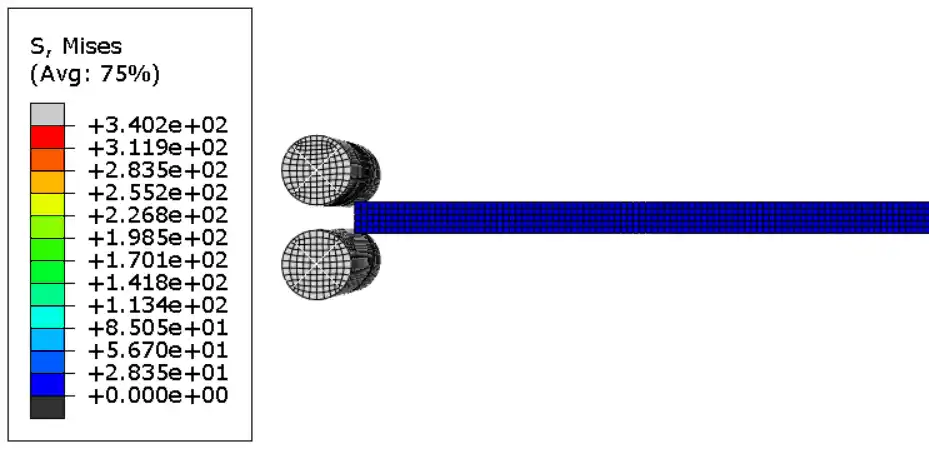
应力云图
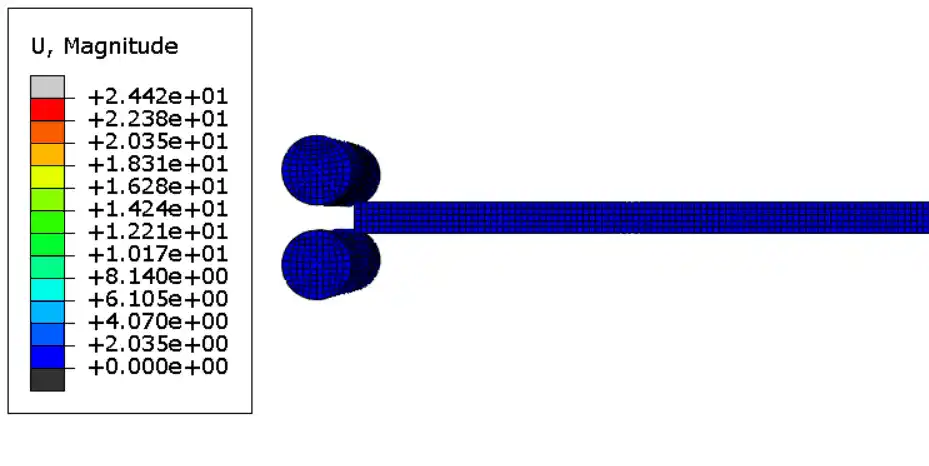
位移云图
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















