















































软件

产品


步骤 01
打开ADAMS View,新建一个文件,并且定义好路径和命名,选择工具栏【Bodies】下的【Link】功能,在坐标点为(0,0,0)的位置创建一根长度1000mm的连杆,同样的方法在坐标为(100,0,0)的位置创建一根240mm的连杆,最后在坐标(330,0,0)的位置创建一根300mm的连杆,如图1所示。
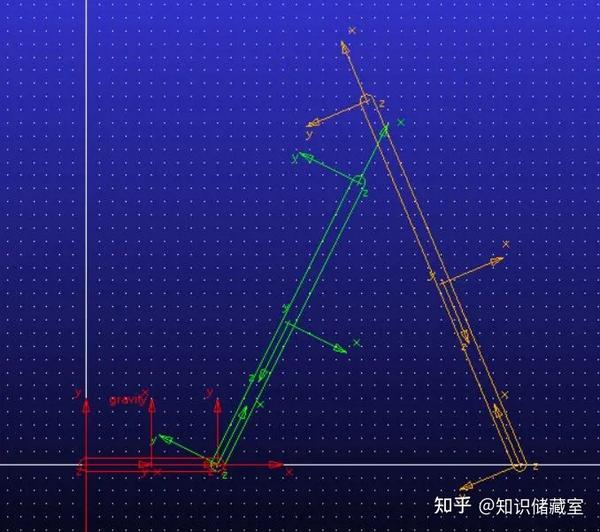
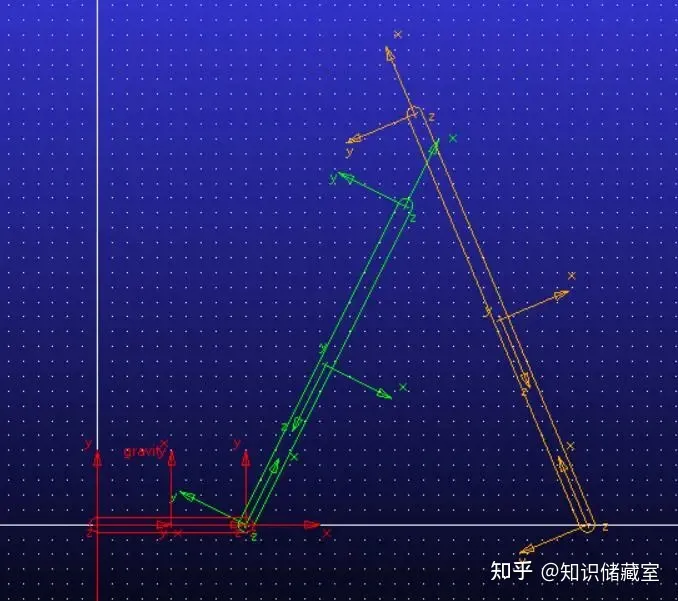
图1 模型构建
步骤 02
依次对各个部件进行命名,如图2所示。

图2 部件命名
步骤 03
完成命名之后便开始创建连接关系,选择工具栏【Connections】下的【Create a Revolute Joint】功能创建曲柄与地面之间的转动副、曲柄与连杆之间的转动副、连杆与滑摇杆之间的转动副、摇杆与地面之间的转动副,如图3所示。
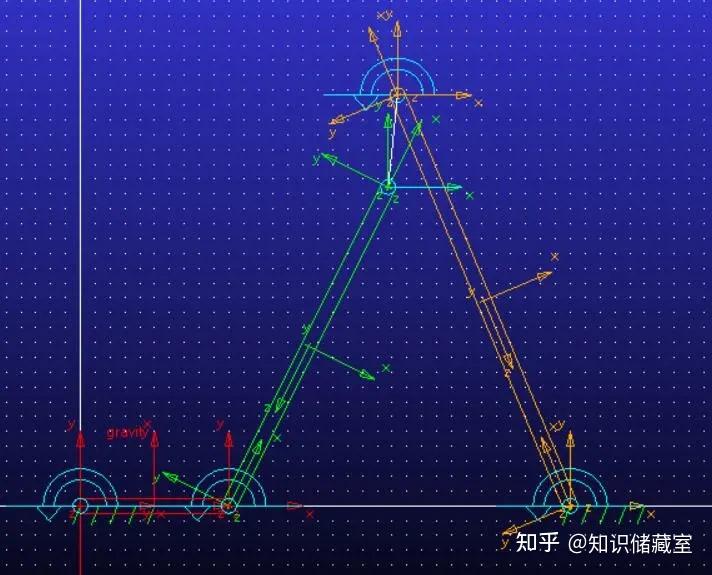
图3 创建连接关系
步骤 04
对模型进行装配计算,便可得到如图4所示的位置关系。
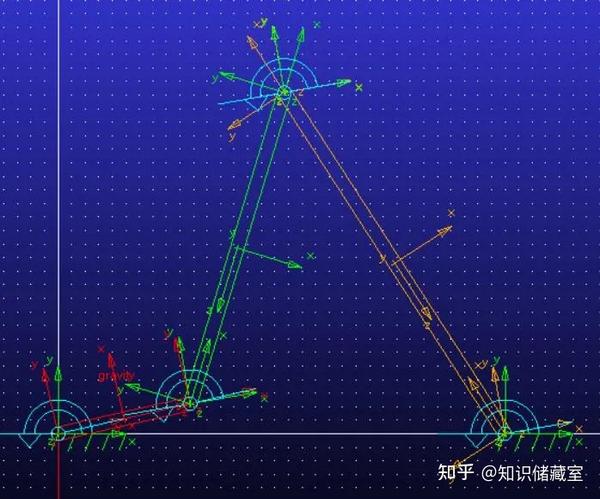
图4 装配计算
步骤 05
选择工具栏【Motions】下的【Rotation Joint Motion】功能,选择曲柄与地面之间的转动副作为驱动,并且修改驱动函数为【180d*time】,如图5所示。

图5 创建驱动
步骤 06
打开工具栏【Simulation】下的【Run an Interactive Simulation】,设置仿真时间为4s,仿真步长为200步,如图6所示。
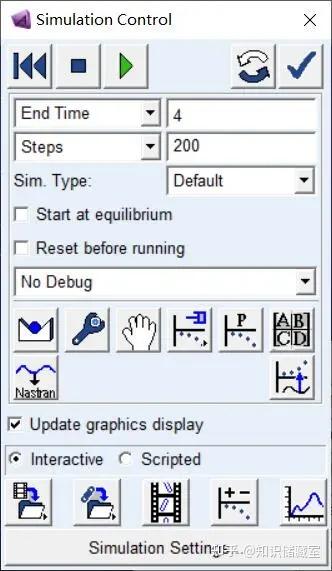
图6 求解设置
步骤 07
点击求解控制对话框内的【Star Simulation】进行求解,便可得到如图7所示的四连杆机构运动动画。
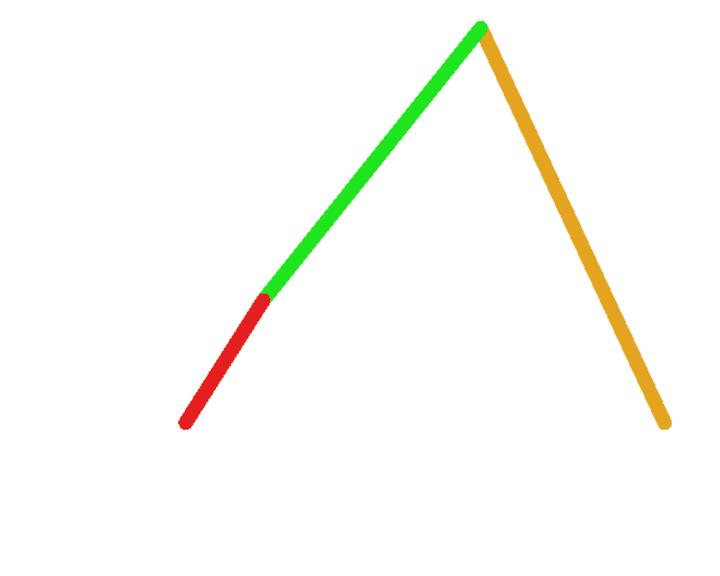
图7 四连杆机构运动动画
步骤 08
选择工具栏【Result】下的【Open ADAMS Postprocessor】进入后处理界面,图7为滑块在X轴方向的位移情况,图8为滑块在X轴方向的移动速度。
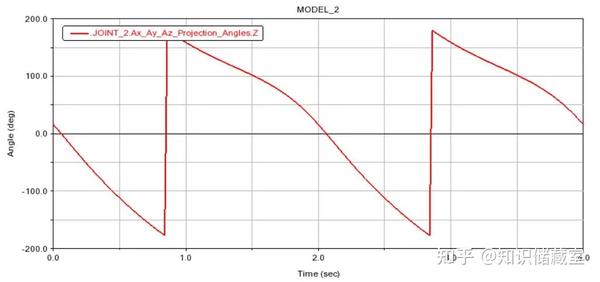
图8 连杆与摇杆之间的转角
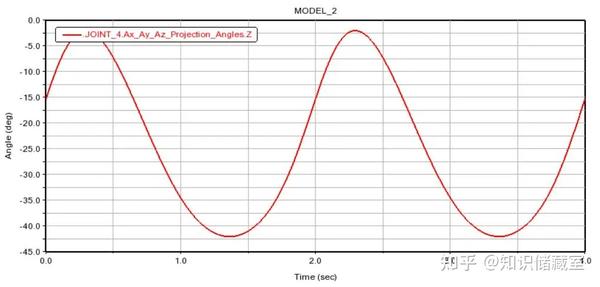
图9 摇杆的摆角
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















