















































软件

产品


Adams、Ansys Workbench和Matlab均广泛应用于工业领域中,不少从事和学习相关内容的科研工作者及在校生,也在不断对比不同软件之间的差异,因此本篇文章以简单的四连杆机构为例进行分析,对比不同软件中结果的差异。
图1为四连杆机构的基本尺寸长度,其中曲柄长度为100mm,连杆的长度为240mm,摇杆的长度为300mm。
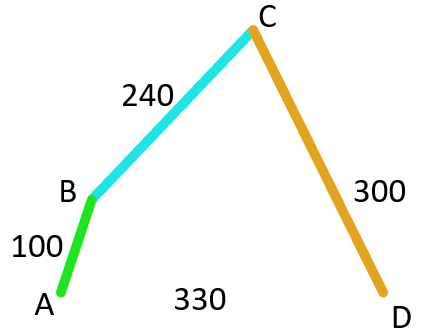
图1 四连杆机构
直接在Adams中进行模型的构建,同时创建好对应的连接关系,连接关系如下表所示。创建完成后Adams动力学模型如图2所示。
部件1部件2连接关系大地曲柄转动副曲柄连杆转动副连杆摇杆转动副摇杆地面转动副
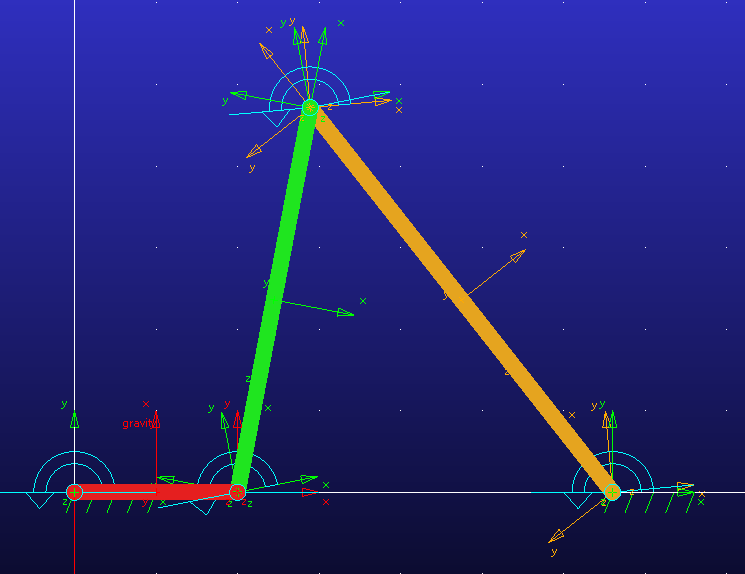
图2 Adams动力学模型构建
同时在在曲柄与底面之间的转动副添加驱动,驱动函数为1d*Time。设置仿真时间为360s,仿真步长为360,通过仿真得到如图3所示的动画结果。
GIF
图3 运动动画(Adams)
使用三维建模软件SolidWorks模型创建,其尺寸与图1中一致。在Workbench中创建刚体动力学模块,将模型导入并创建好对应的连接关系,其连接关系如图4所示。并且在曲柄和地面之间的转动副添加载荷条件,仿真完成后得到如图5所示的动画结果。
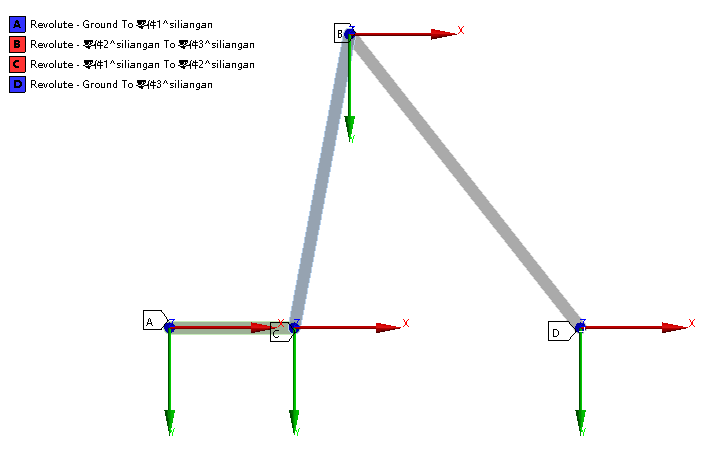
图4 Workbench连接关系构建
GIF
图5 运动动画(Workbench)
已知四连杆机构的相关参数,通过数学公式便可推导出其运动学模型,并将其运动学模型利用Matlab语言进行编写,其代码如图6所示。
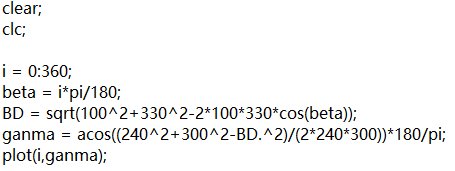
图6 Matlab代码
分别查看Adams、Ansys Workbench和Matlab中连杆与摇杆之间的夹角,其结果图分别如图7、图8和图9所示,结果表明,不同的软件得到的四连杆机构结果均一致。
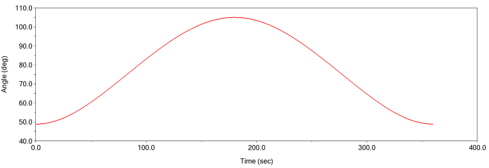
图7 Adams仿真结果
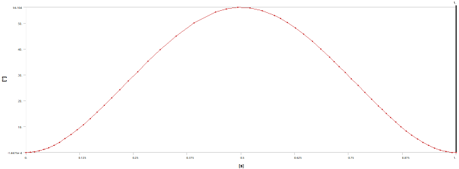
图8 Workbench仿真结果
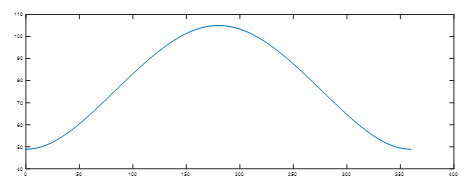
图9 Matlab仿真结果
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















