















































软件

产品


二阶系统
这个东西通常被称为二阶系统,接下来我们用MATLAB的Simulink搭建这个系统:
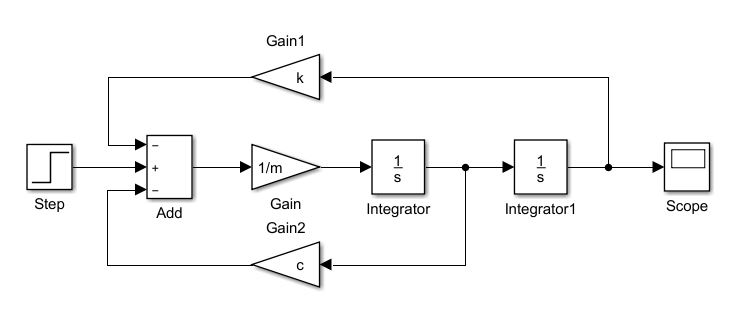
Simulink搭建二阶系统
如图 2所示,我们需要用到Step、Add、Gain、Integrator、Scope这几个模块。点击工具栏的Library Browser在Simulink Library找到这几个模块,并将其拖放到工作区。
Sources下的Step模块

图 3 Step模块
Sinks 下的 Scope 模块
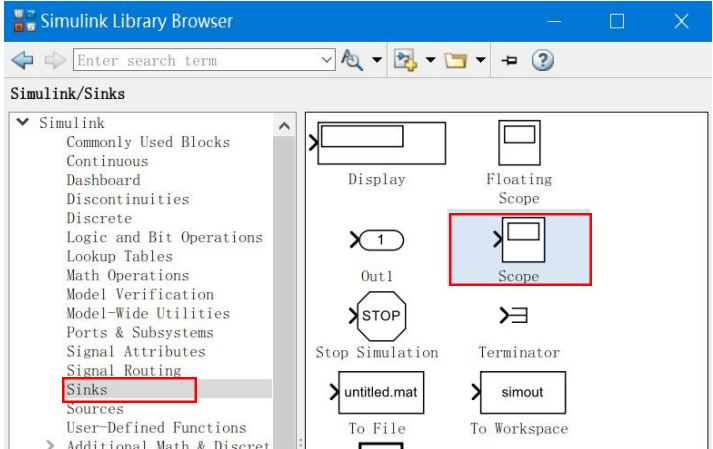
图 4 Scope 模块
Continous 下的 Integrator 模块

图 5 Integrator 模块
Math Operations 下的 Gain 模块
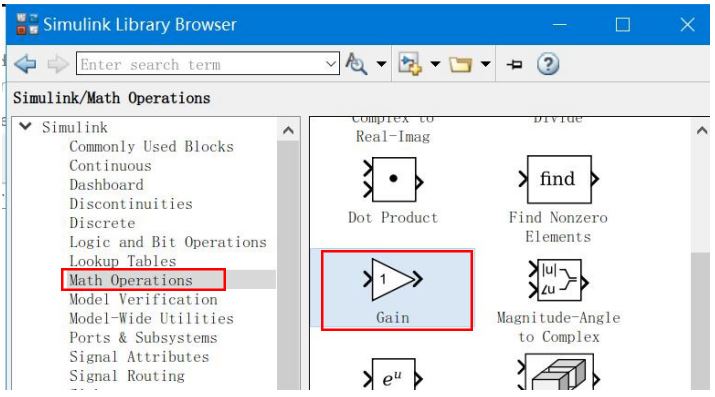
图 6 Gain 模块
Math Operations 下的 Add 模块
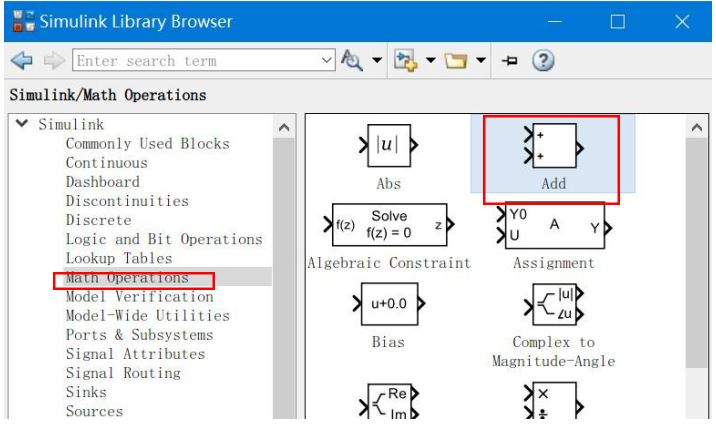
图 7Add 模块
然后配置我们找到的这些模块,双击 Add 模块,将 List of signs改为-+-
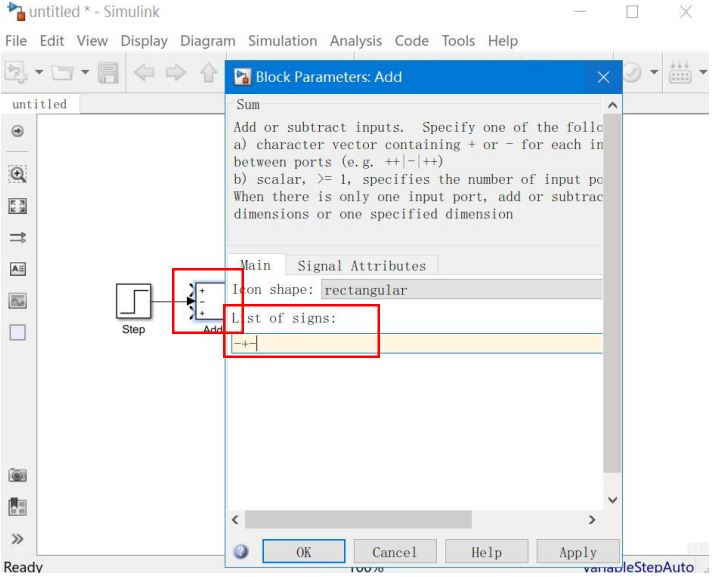
图 8 配置 Add 模块
按住 Ctrl 拖动 Gain 模块,将其复制,右键 Gain 模块进行旋转或者选中 Gain 模块后按快捷键 Ctrl+R
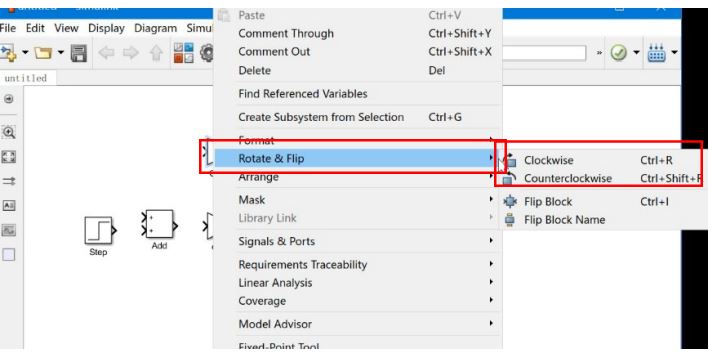
图 9 配置 Gain 模块
将配置好的模块按图 10 方式连接起来,直接拖动鼠标即可连接。
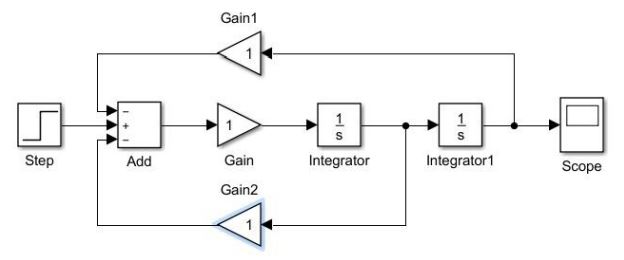
图 10 连接各模块
修改系统的参数,分别双击 Step 以及 3 个 Gain 模块
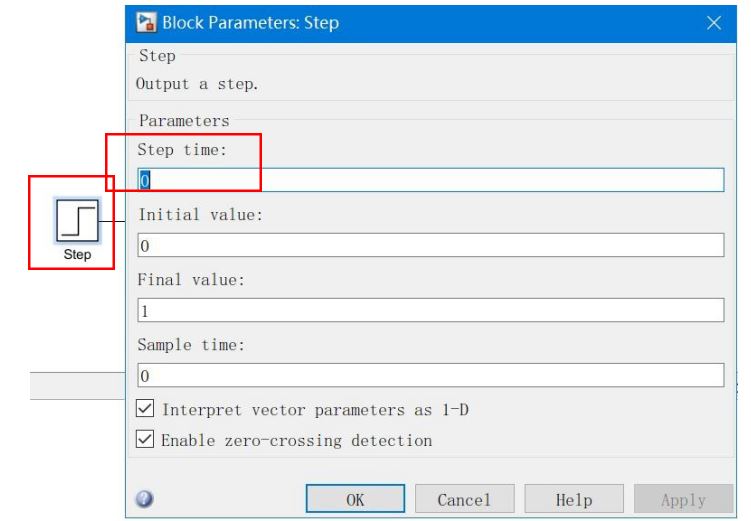
图 11 修改 Step 的 Step time
Gain 模块参数过长,显示不下时可以拖动调整模块大小
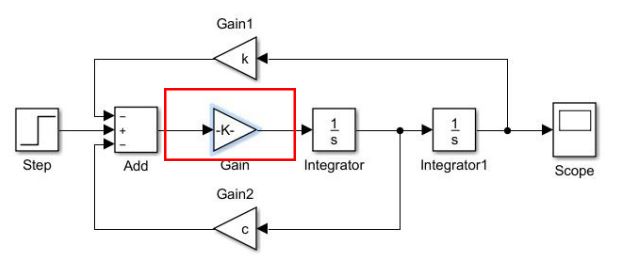
图 12 Gain 模块参数显示不下
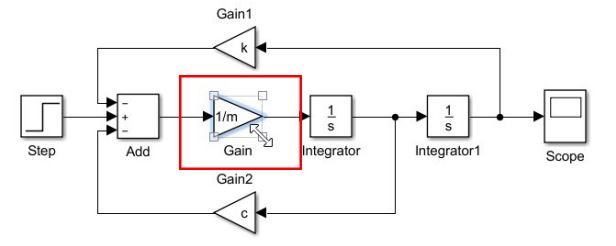
图 13 拖动调整模块大小
点 击 File->Model Properties-> Model Properties->Call backs-> InitFcn 进行初始化参数。
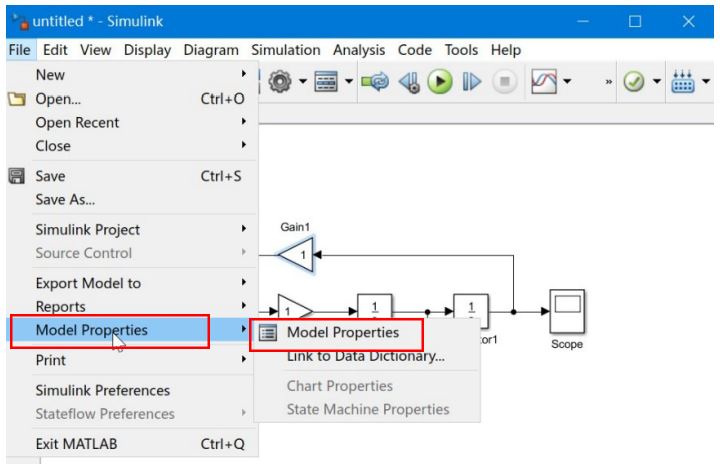
图 14 初始化参数
m=0.5;%这里是质量 0.5kg
c=0;% 这里是阻尼 0
k=1; % 这里是弹性 1N/m
w=sqrt(k/m); % 这里是振动系统的频率
kes=c/(2*w*m);%这里是判断系统状态的 ξ 值
%0<ξ<1:欠阻尼 ξ=1:临界阻尼 ξ>1:过阻尼
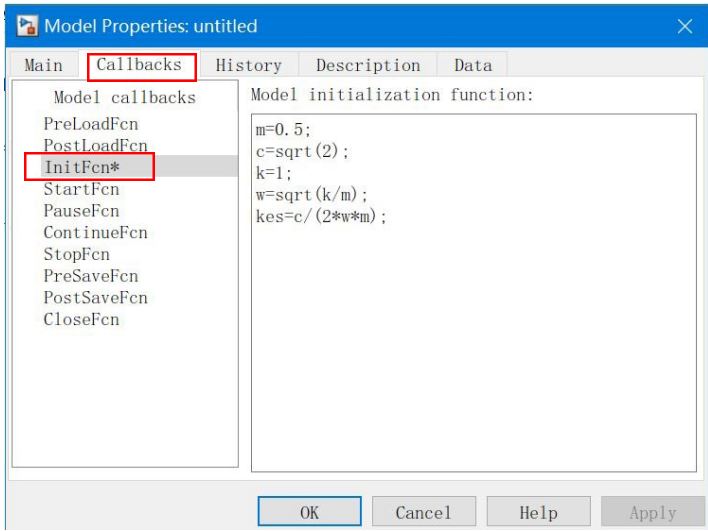
图 15 初始化参数
设置一下仿真系统的仿真步长,点击工具栏的小齿轮,点击下拉菜单 Additional options 设置 Max step size 为 0.0001(值越小,曲线越光滑,但系统运算量也越大)。
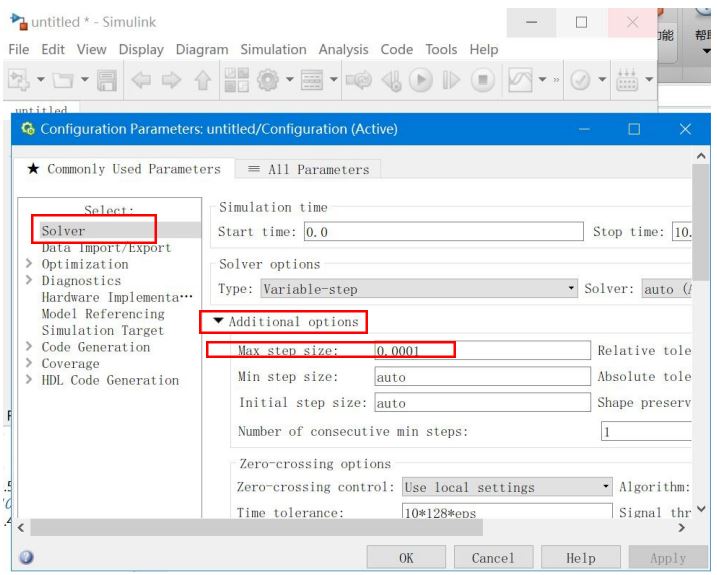
图 16 设置仿真系统的仿真步长
点击工具栏的小三角运行,双击 Scope 模块查看运行结果。点击View->Style 进行图像风格的调整。
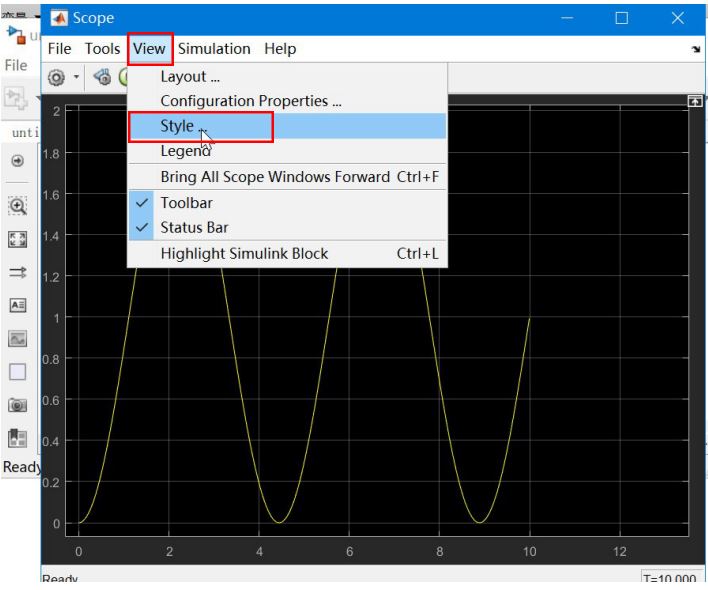
图 17 图像风格的调整
调整完后的图像
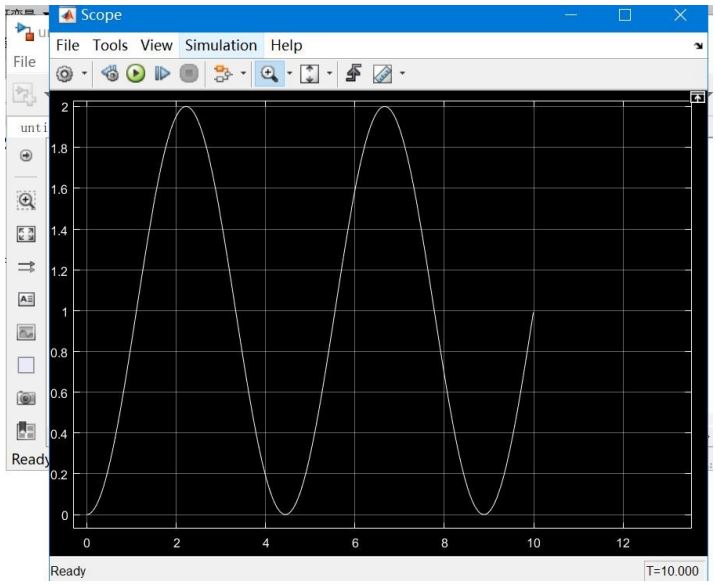
图 18 图像风格的调整
回到 MATLAB 主界面工作区,在工作区窗口可以查看运行后,各个参数的取值。
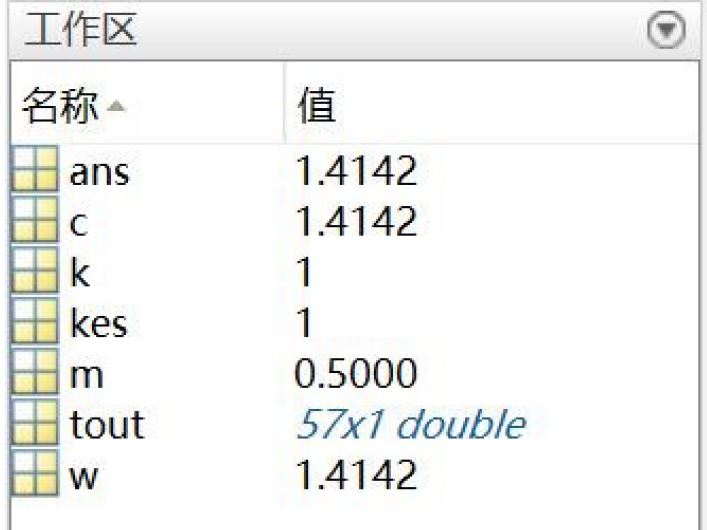
图19 各参数取值
然后可以对参数进行修改,探索二阶系统不同ξ 值下的单位阶跃响应曲线。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















