















































软件

产品


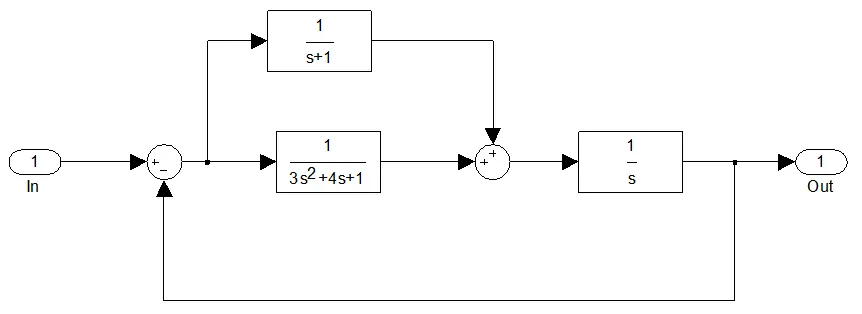
系统框图
谈到框图,首先不难联想到simulink基于模块化的系统仿真
首先我们来看一个simulink控制系统仿真
subsystem
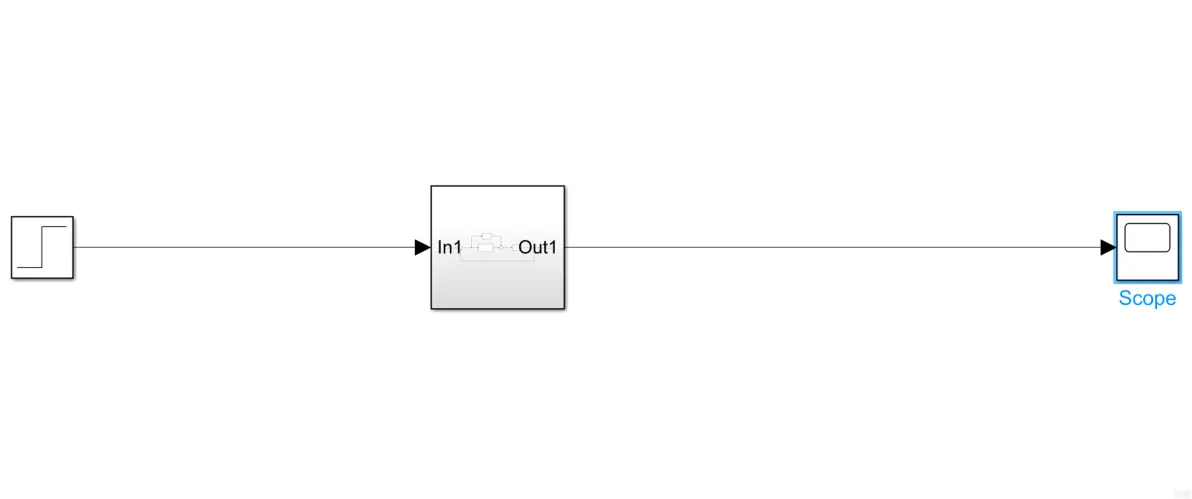
step response
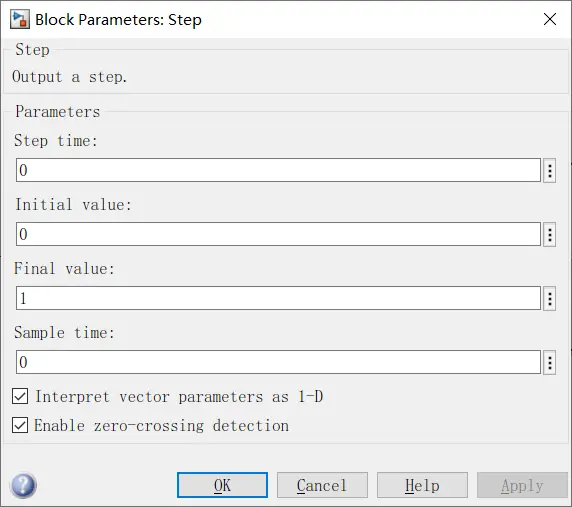
修改 step time 为 0
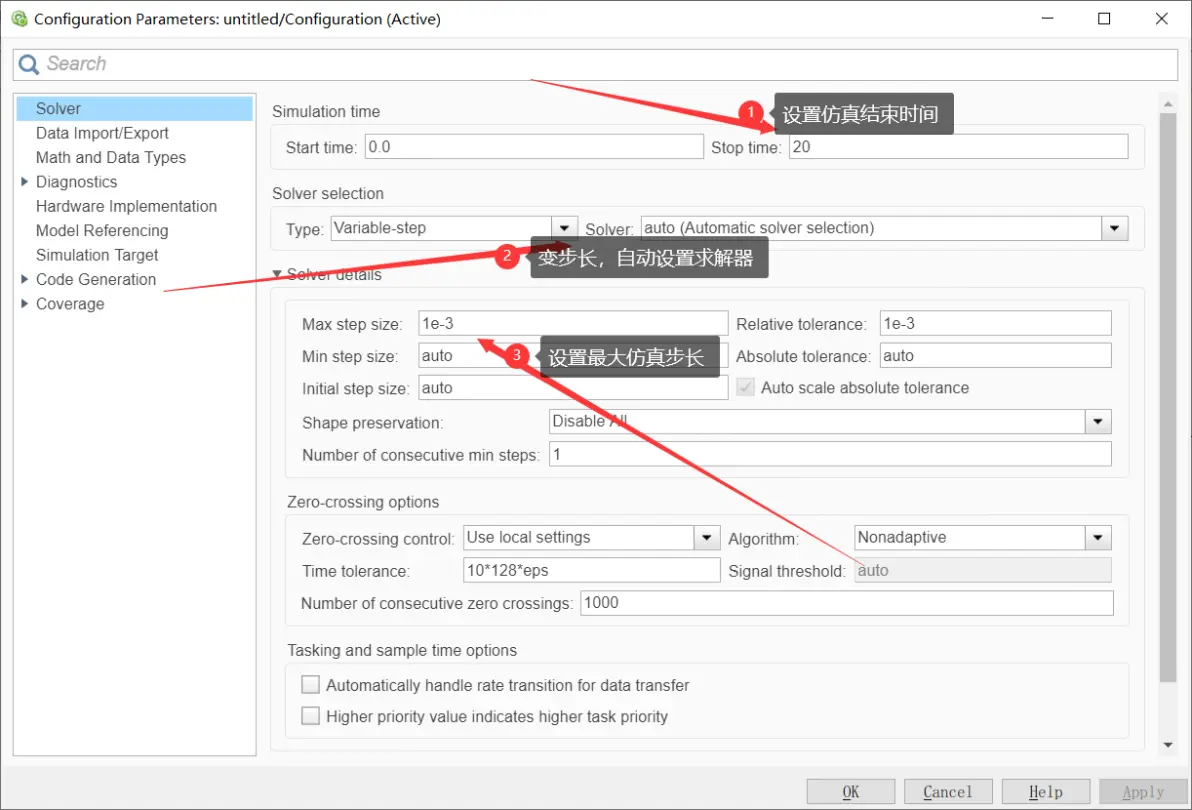
模块搭建好后,可以设置仿真时间、求解器以及步长
按下 Ctrl+E

Scope
clear
G1=tf(1,[1 1]);
G2=tf(1,[3 4 1]);
Gp=parallel(G1,G2); %系统并联部分的化简
G3=tf(1,[1 0]);
Gs=series(G3,Gp); %系统串联部分的化简
Gc=feedback(Gs,1) ; %系统负反馈连接
step(Gc,20)
如下图
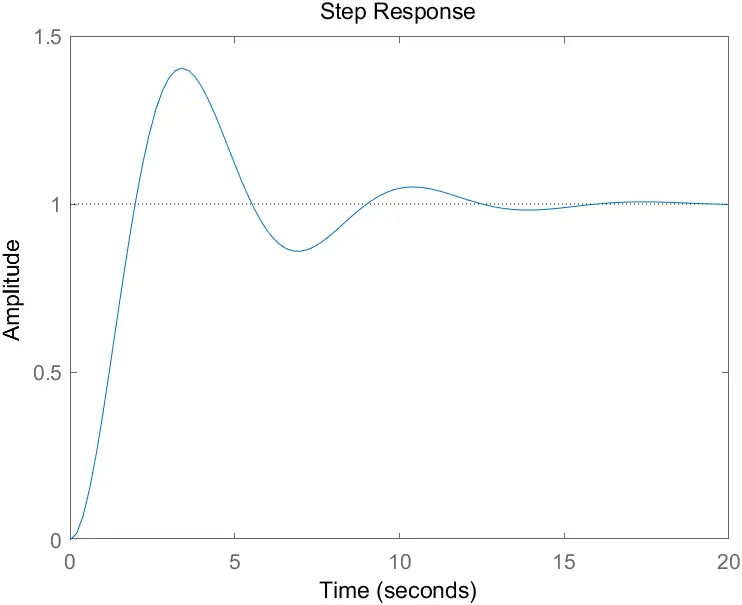
figure of step response (MATLAB)
我们发现,matlab和simulink运行的结果一模一样
系统方框图
一、串联连接
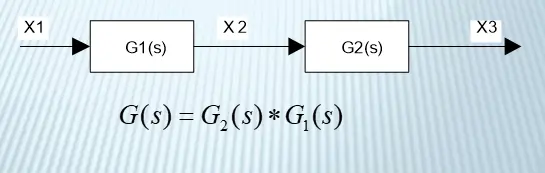
串联连接
matlab实现,可以实现多级串联
G = G2*G1;
G = series(G1,G2)
二、并联连接
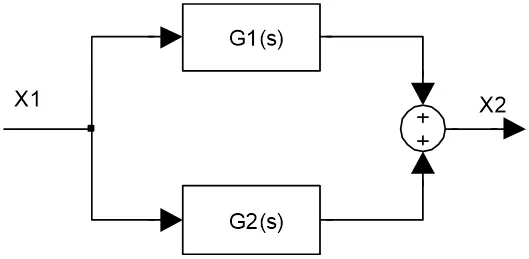
并联连接
在matlab中实现并联连接
G = G1+G2
G = parallel(G1,G2)
三、反馈连接
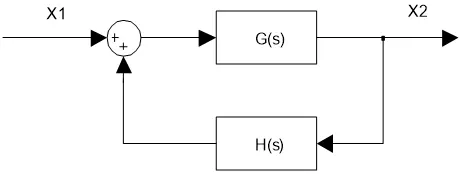
正反馈连接

负反馈连接

求G1(s)和G2(s)分别进行串联、并联和反馈连接后的系统模型。
>> G1 = tf(1,[1 5 23]);
>> G2 = tf(1,[1 4]);
>> Gs = series(G1,G2)
Gs =
1
-----------------------
s^3 + 9 s^2 + 43 s + 92
Continuous-time transfer function.
>> Gs1 = G1*G2
Gs1 =
1
-----------------------
s^3 + 9 s^2 + 43 s + 92
Continuous-time transfer function.
>> Gp = parallel(G1,G2)
Gp =
s^2 + 6 s + 27
-----------------------
s^3 + 9 s^2 + 43 s + 92
Continuous-time transfer function.
>> Gp1 = G1+G2
Gp1 =
s^2 + 6 s + 27
-----------------------
s^3 + 9 s^2 + 43 s + 92
Continuous-time transfer function.
>> Gf = feedback(G1,G2,-1)
Gf =
s + 4
-----------------------
s^3 + 9 s^2 + 43 s + 93
Continuous-time transfer function.
>> Gf1 = feedback(G1,G2,1)
Gf1 =
s + 4
-----------------------
s^3 + 9 s^2 + 43 s + 91
Continuous-time transfer function.
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















