















































软件

产品


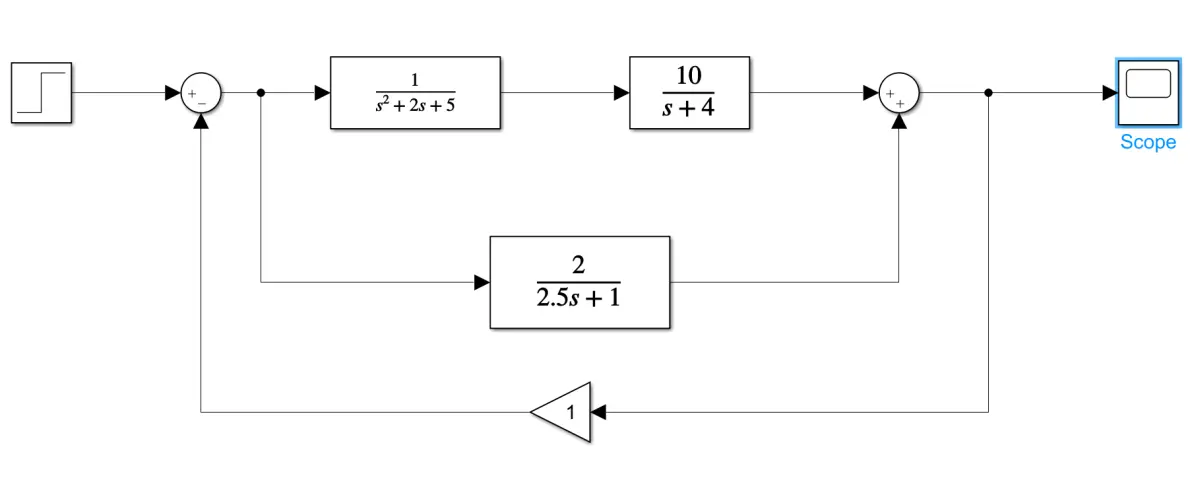
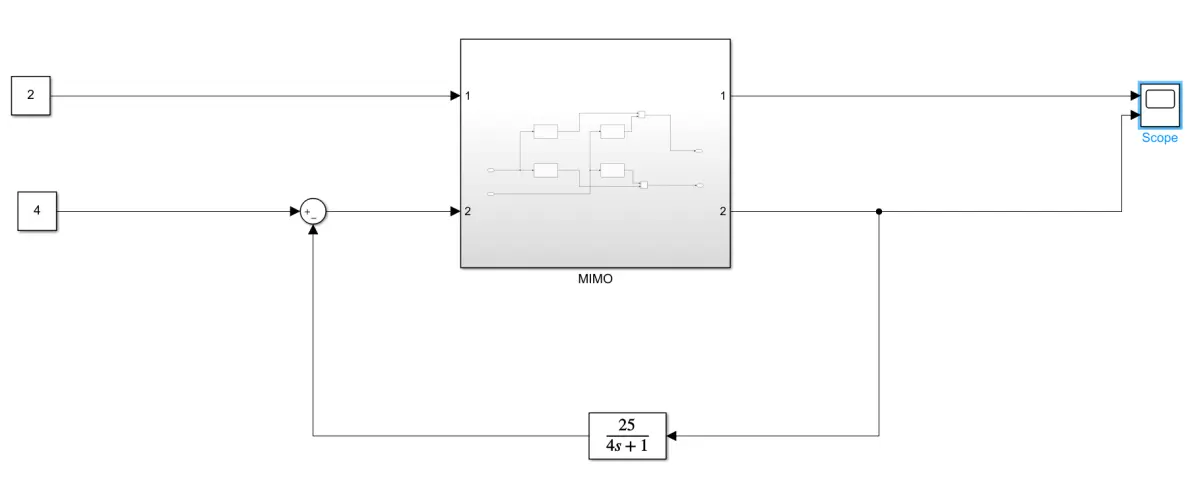
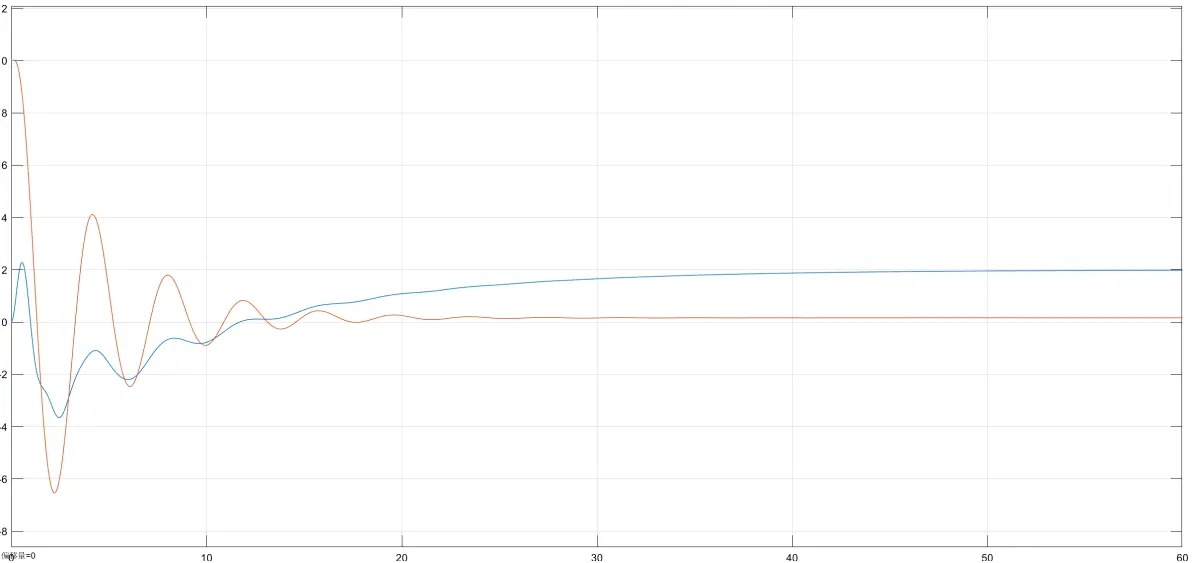
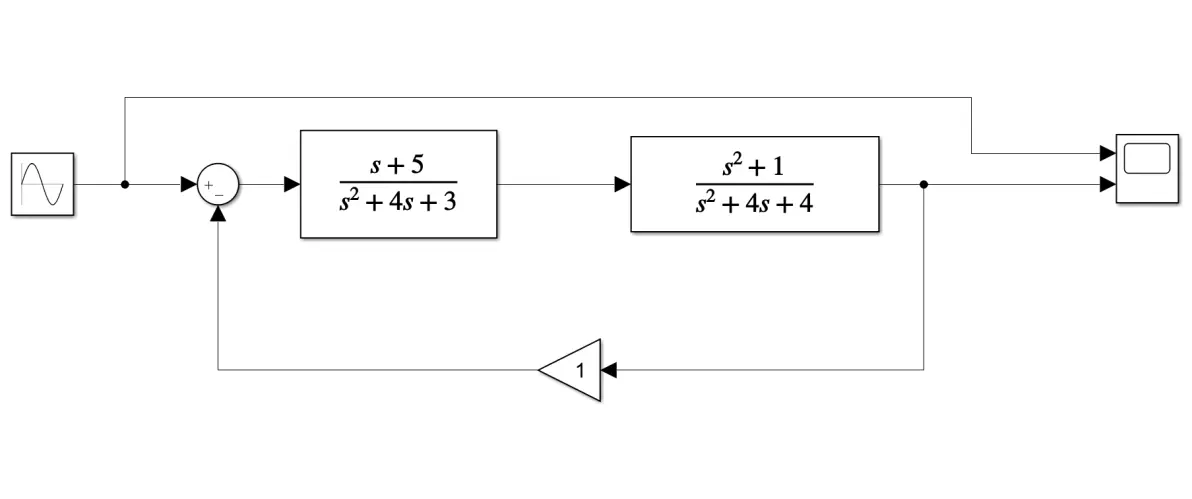
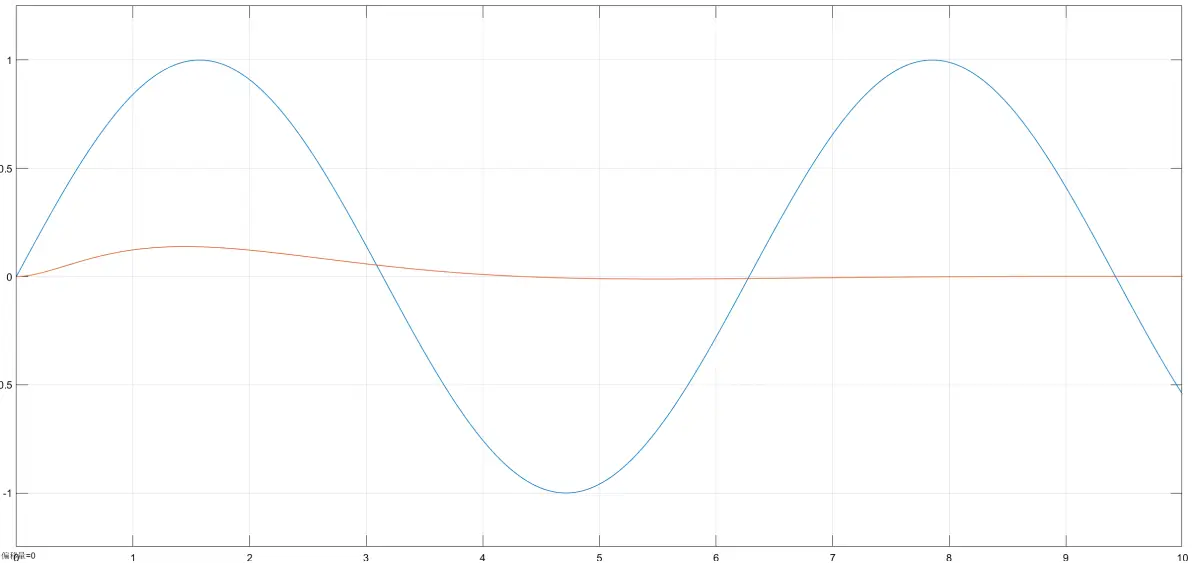
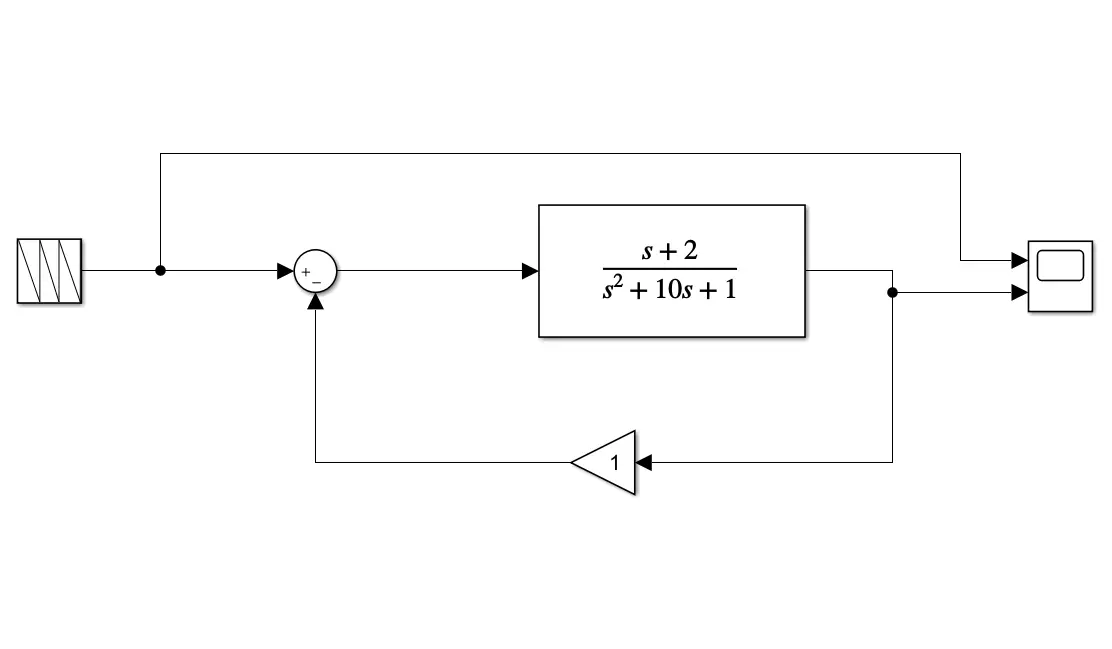
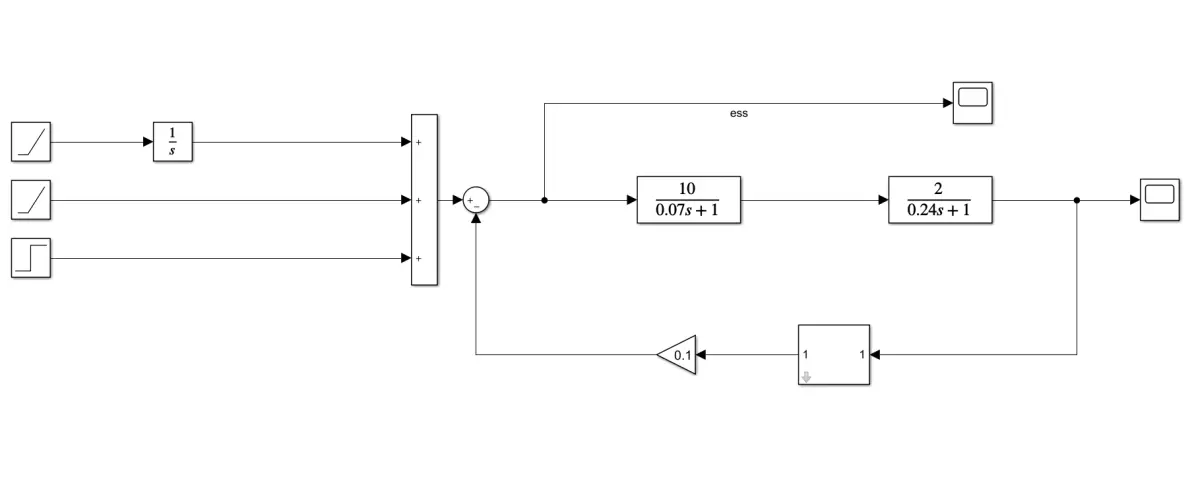
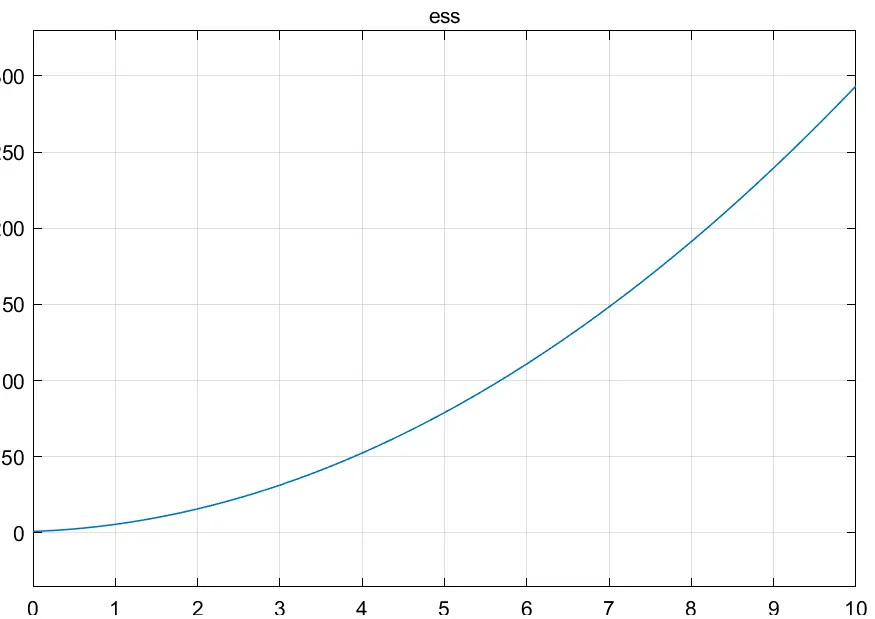
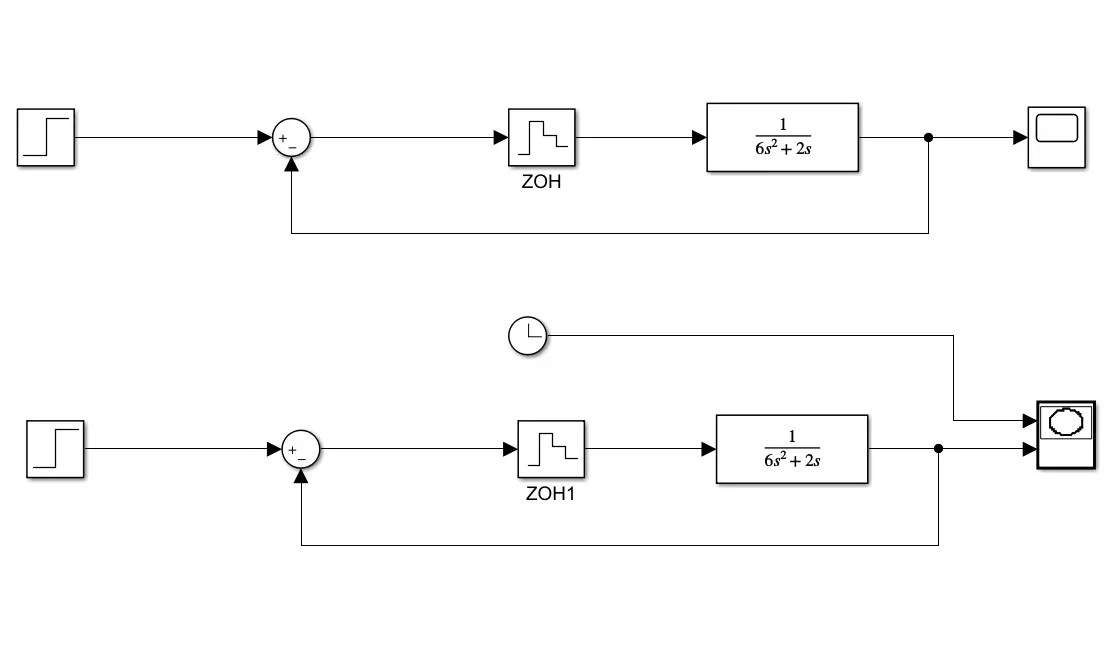
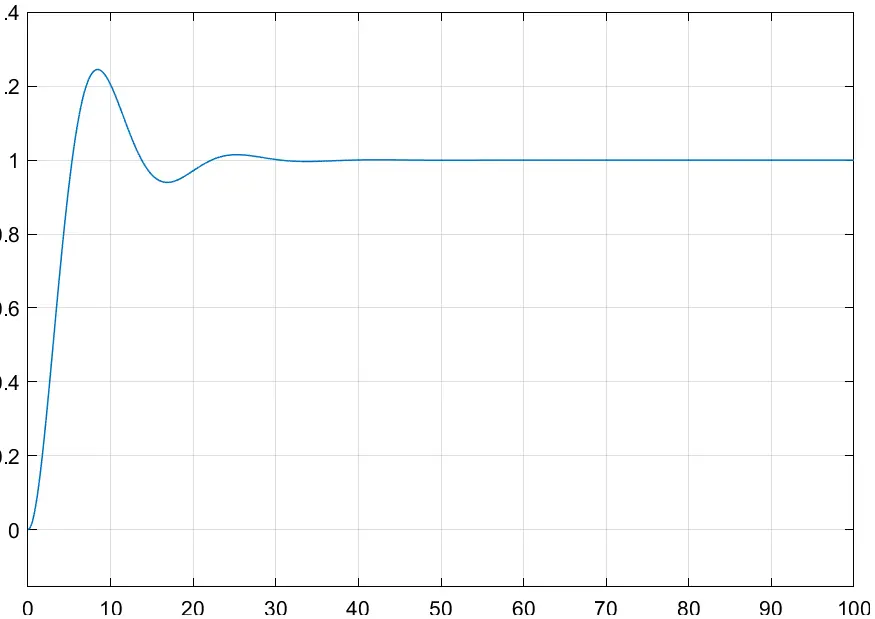
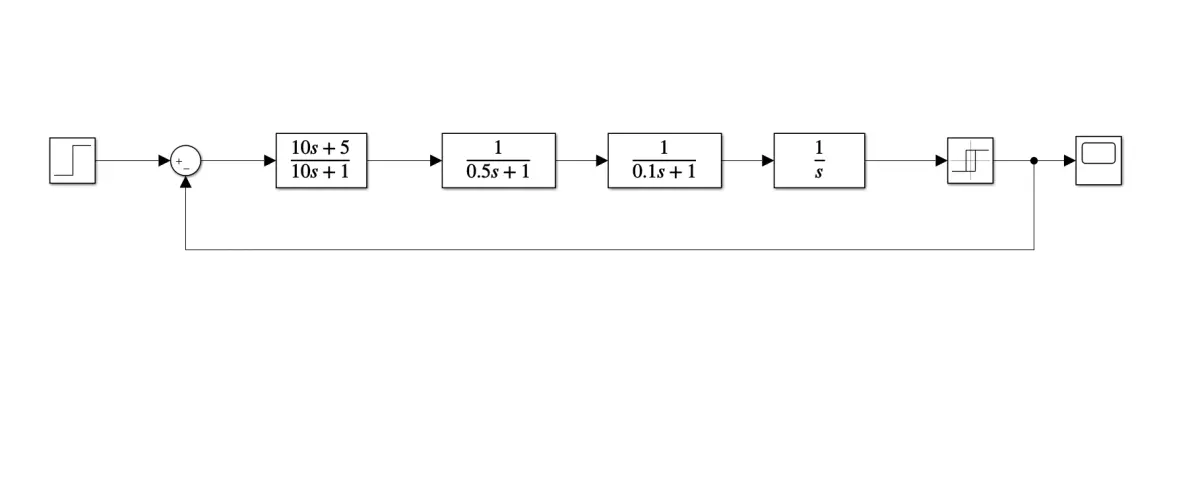
这一节以simulink搭建控制系统框图
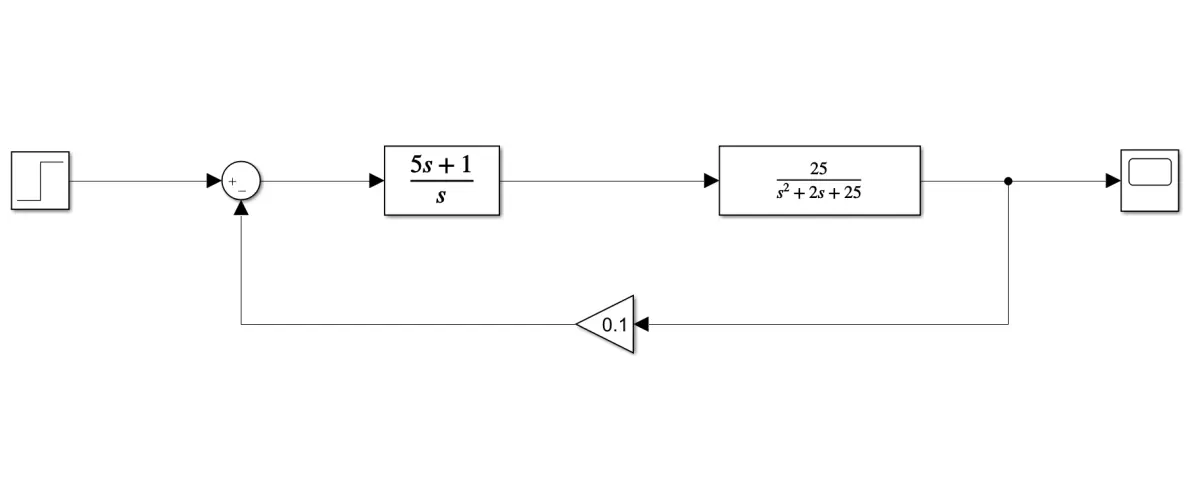
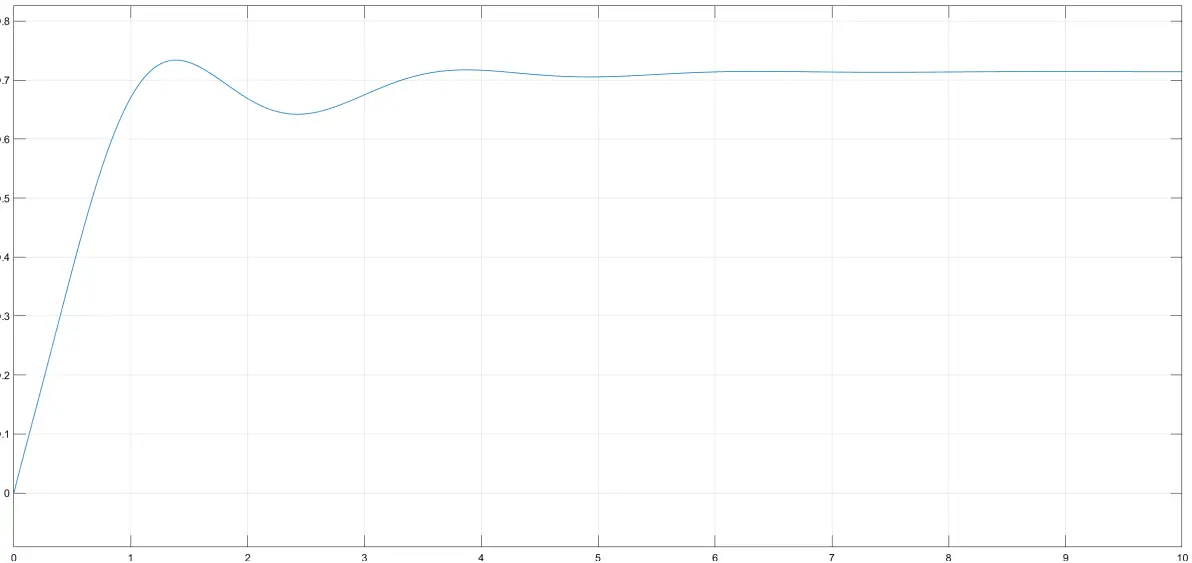
G1 = tf([5 1],[1,0]);
>> G2 = tf([25],[1 2 25]);
>> G3 = series(G1,G2);
>> G4 = feedback(G3,0.1,-1);
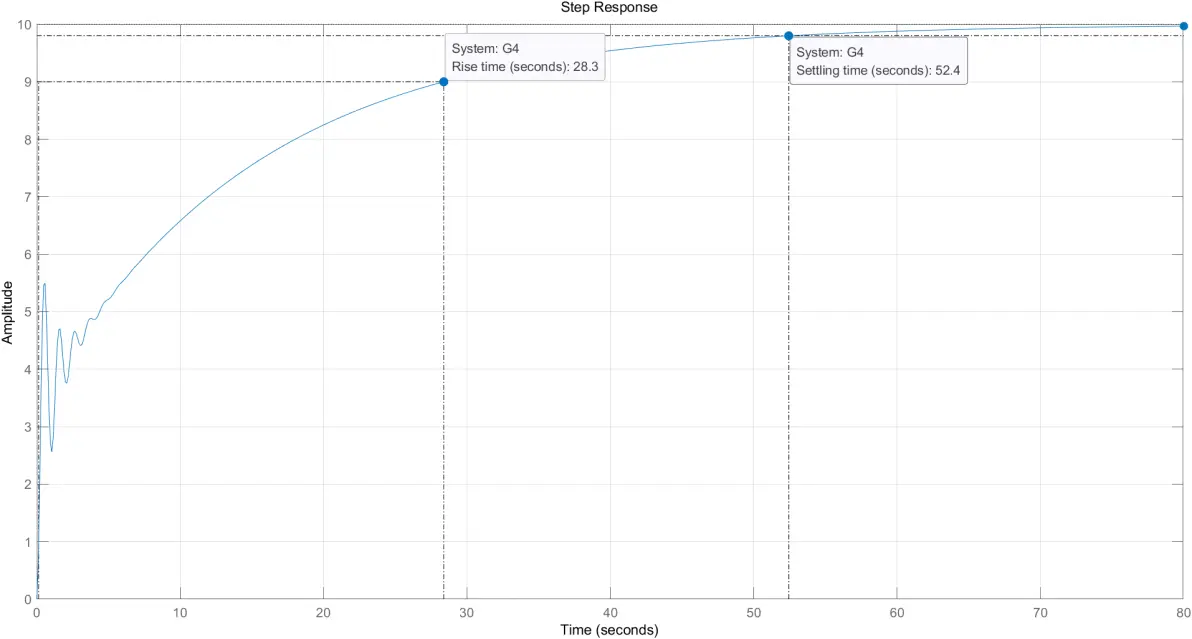
>> step(G4)
matlab
simulink

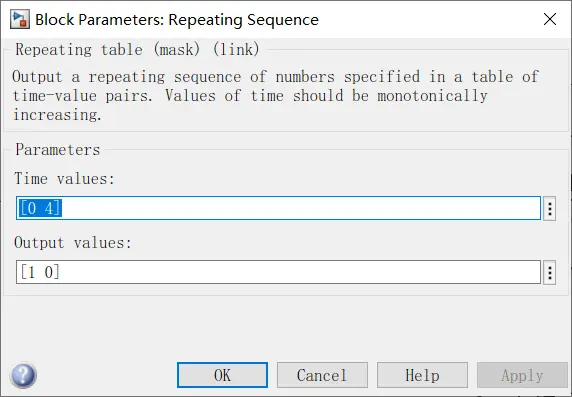
5.2
parameter setting
simulink
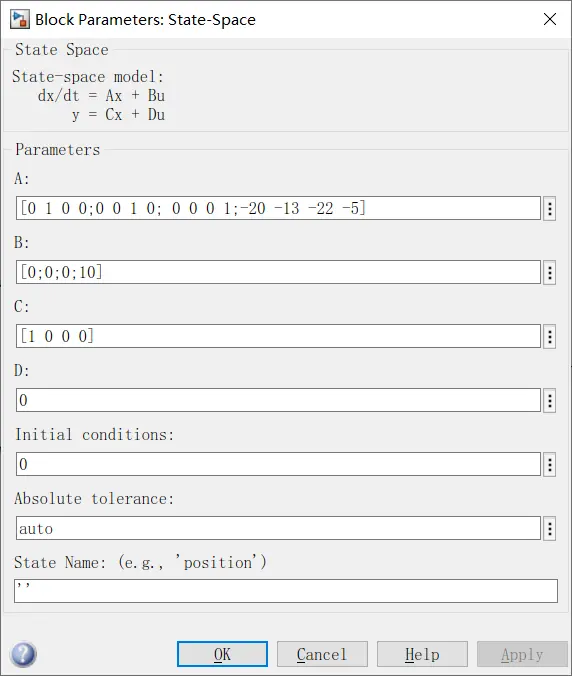
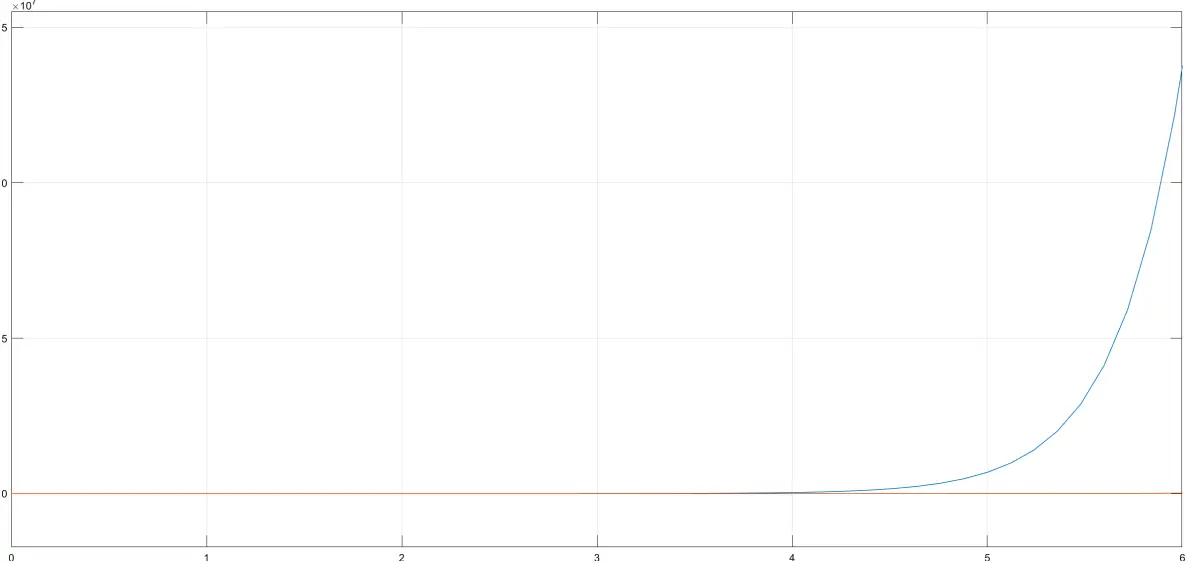
>> A = [0 1 0 0;0 0 1 0;0 0 0 1;-20 -13 -22 -5];
>> B = [0;0;0;10];
>> C = [1 0 0 0];
>> D = 0;
>> G = ss(A,B,C,D)
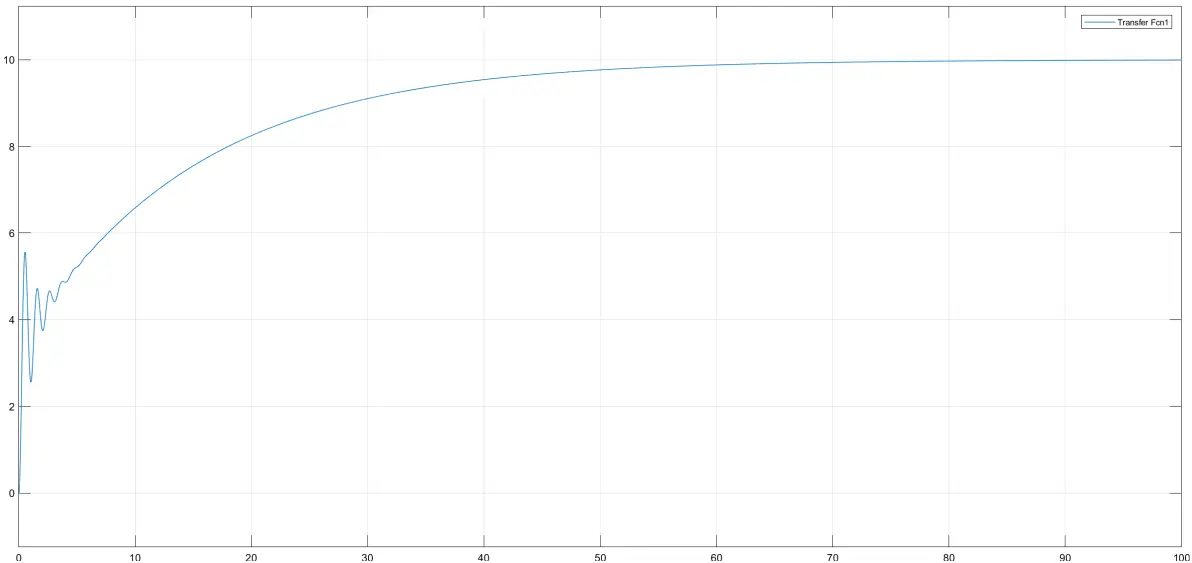
>> step(G)
matlab
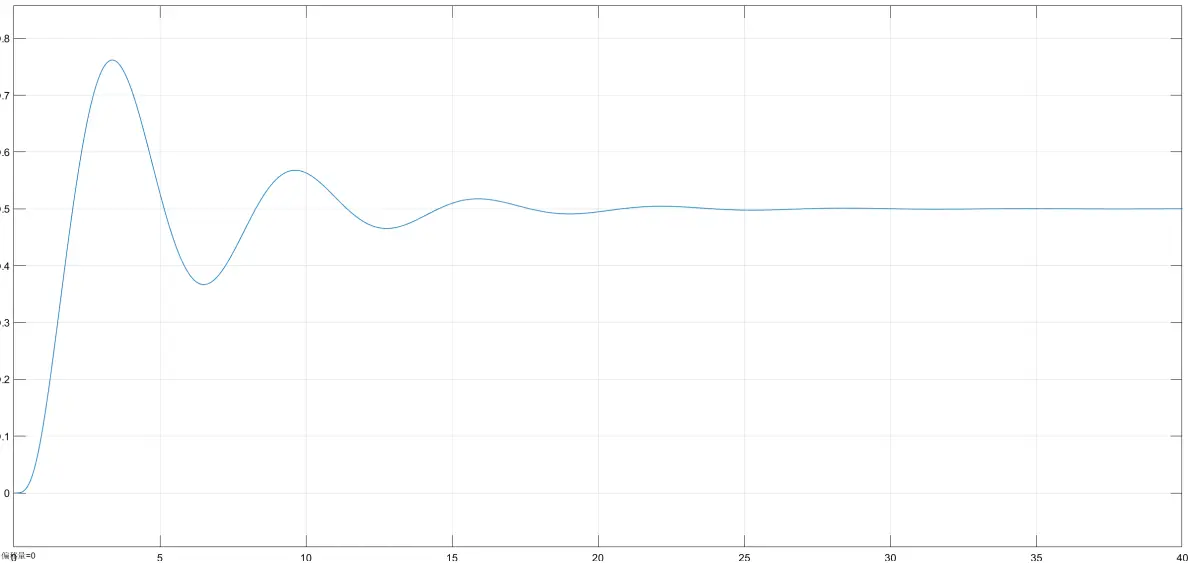
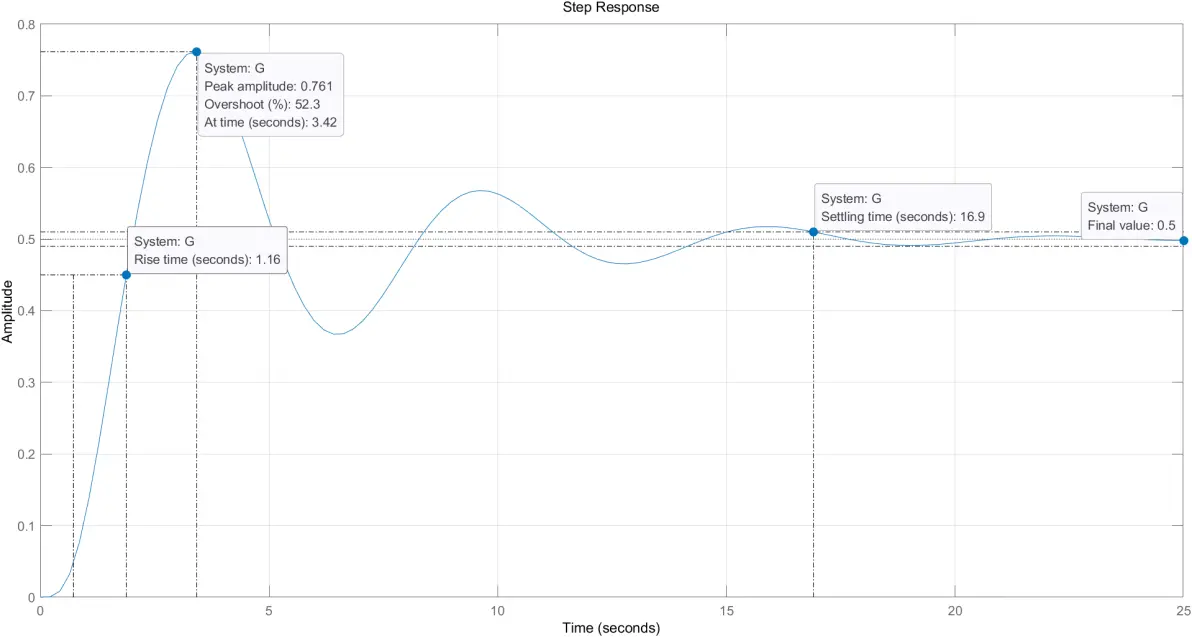
注意开环和单位负反馈闭环
>> s = tf('s');
>> G1 = 1/(s^2+2*s+5)*10/(s+4)+2/(2.5*s+1)
G1 =
2 s^3 + 12 s^2 + 51 s + 50
---------------------------------------
2.5 s^4 + 16 s^3 + 38.5 s^2 + 63 s + 20
Continuous-time transfer function.
>> G = feedback(G1,1,-1)
G =
2 s^3 + 12 s^2 + 51 s + 50
----------------------------------------
2.5 s^4 + 18 s^3 + 50.5 s^2 + 114 s + 70
Continuous-time transfer function.
>> step(G)
matlab
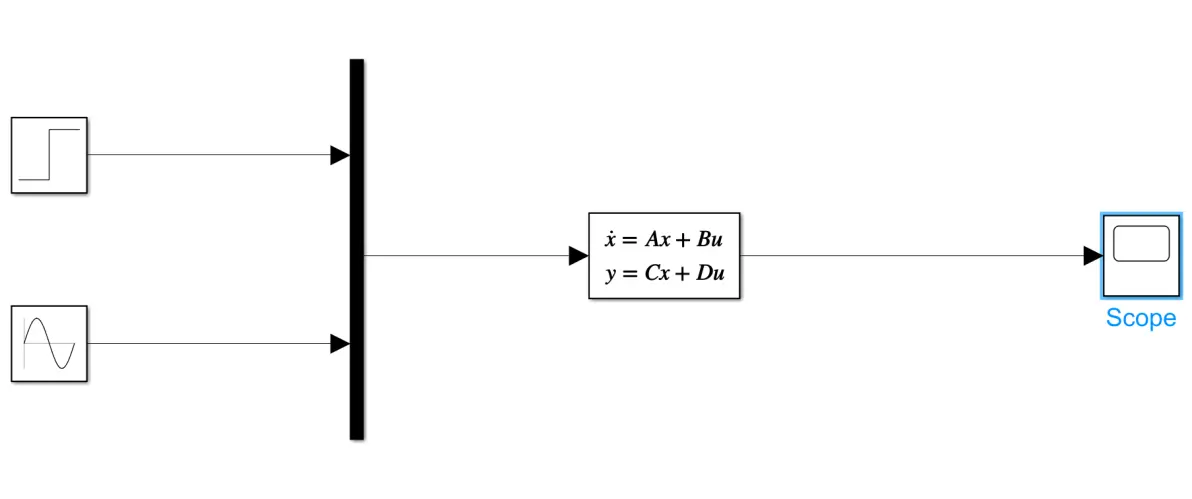
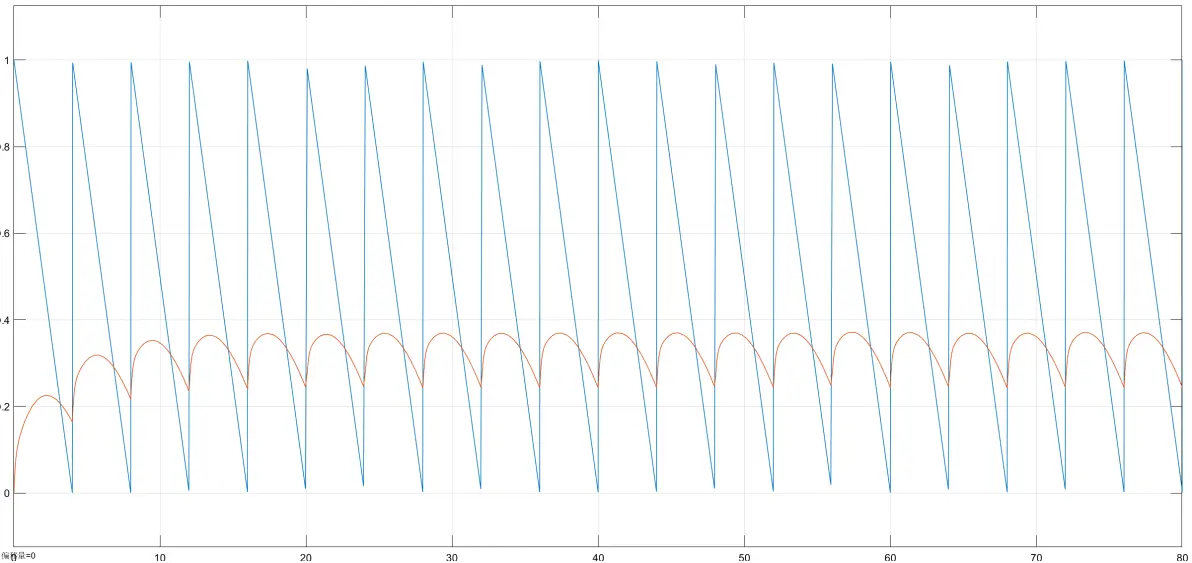
simulink
scope
5.4

subsystem
5.5
state space

simulink
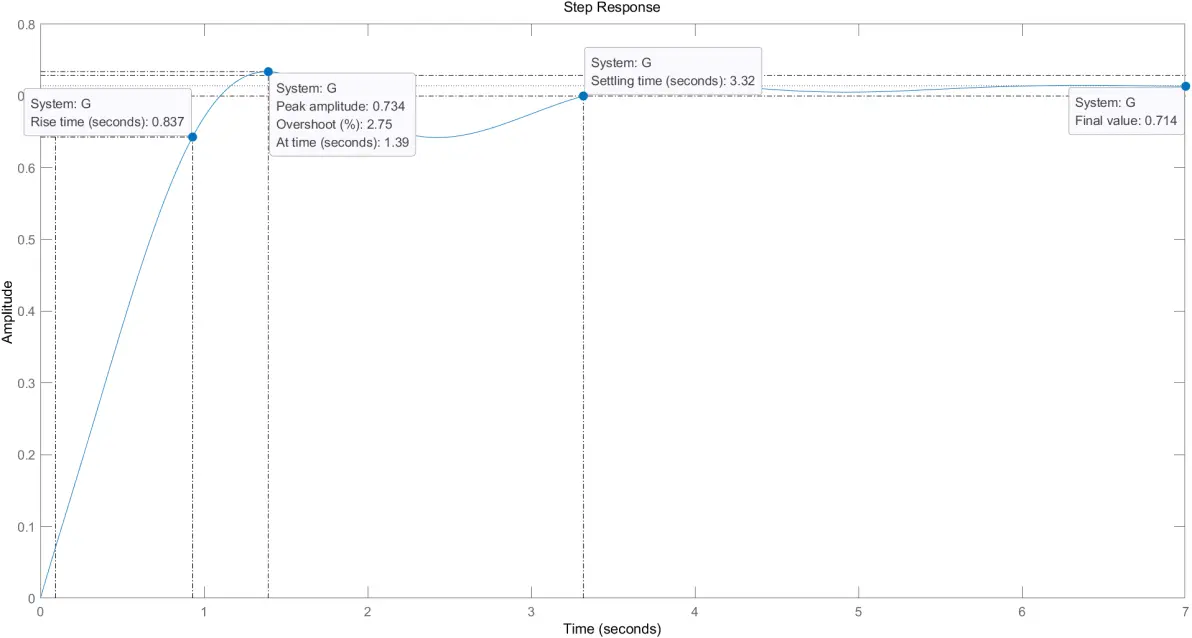
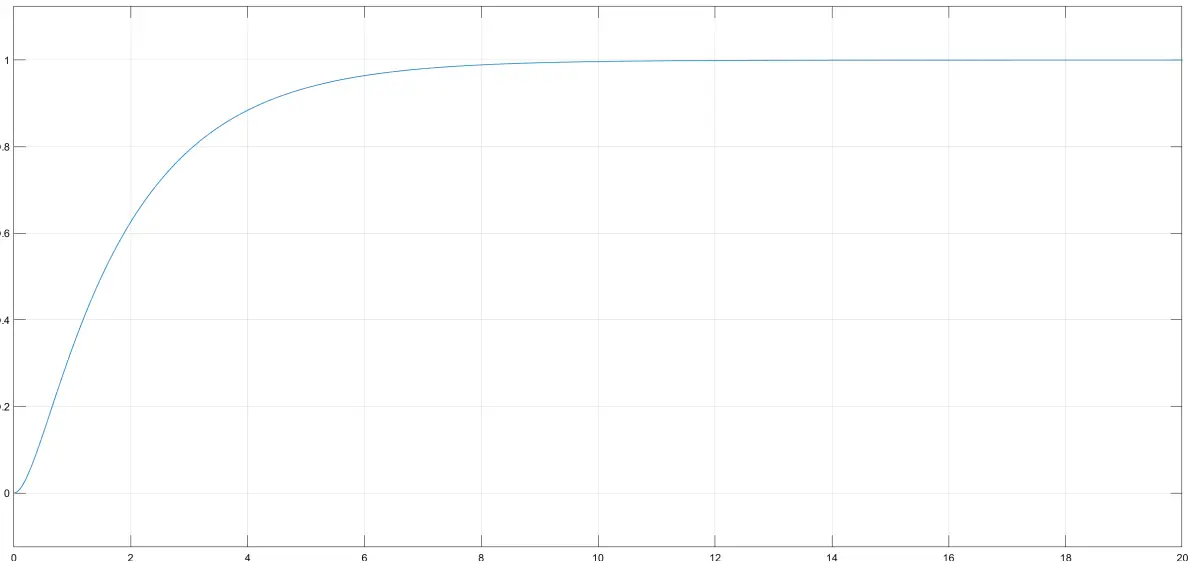
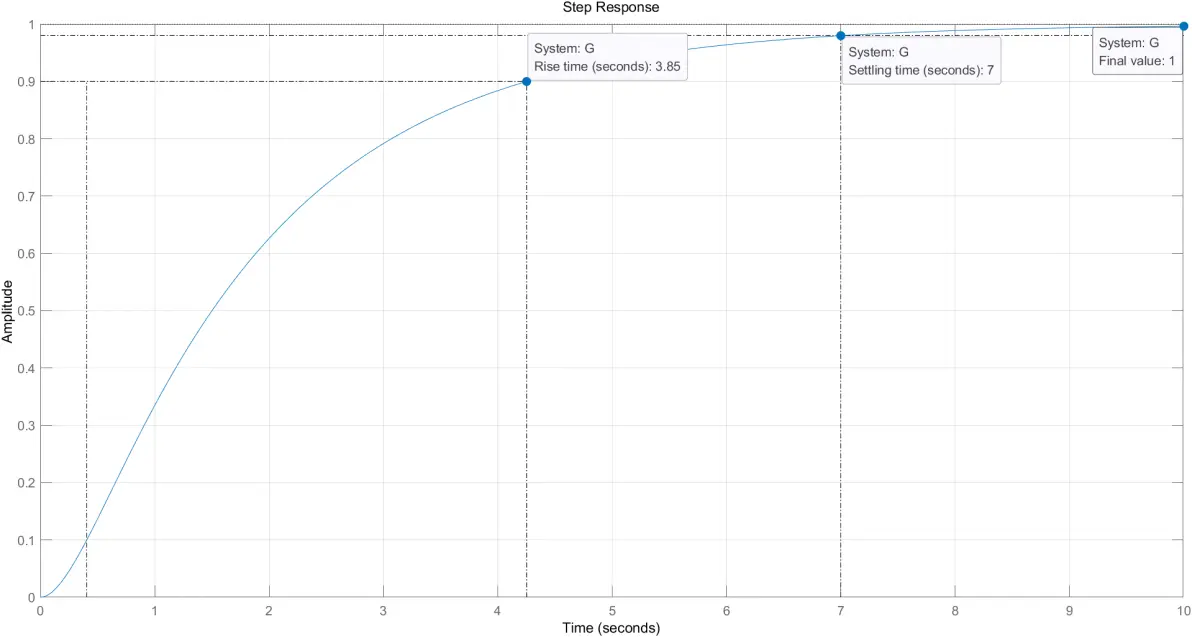
>> G1 = tf(2,[1 4 0]);
>> G = feedback(G1,1,-1);
>> step(G)
matlab

武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















