软件

产品


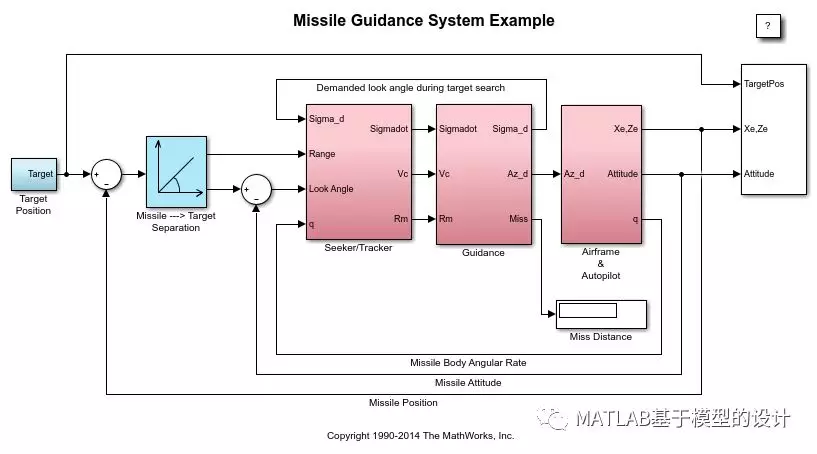
此教程说明在使用应用于导弹自动驾驶仪设计的高级控制方法时如何使用多篇已发表论文中介绍的导弹弹体模型。该模型表示以介于 2 马赫和 4 马赫之间的速度飞行,高度在 10,000 英尺(3,050 米)和 60,000 英尺(18,290 米)之间并且典型攻角在 +/-20 度之间的安定面控制导弹。
该模型的核心元素是弹体的刚体动力学的非线性表示。作用到弹体上的空气动力和力矩通过若干系数生成,这些系数是入射角和马赫数的非线性函数。可以使用 Simulink® 和 Aerospace Blockset™ 创建该模型。此模块集的目的是提供参考组件,如大气模型,它对于所有模型是通用的,而不管弹体配置如何。这些示例包括了 Aerospace 模块集提供的组件的简化版本,让您了解标准模块库具有的重用潜力。
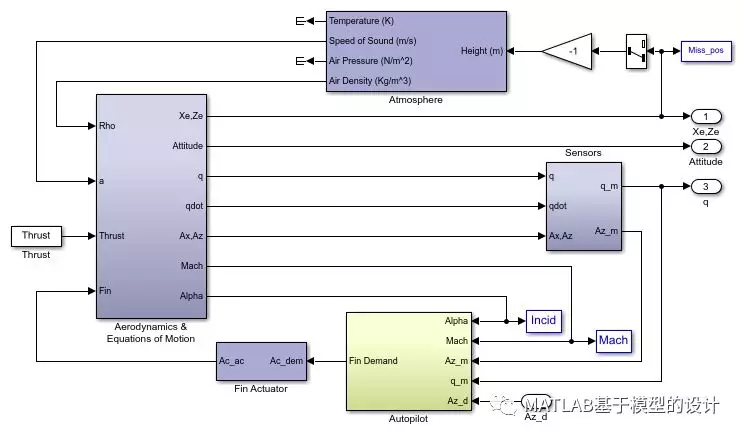
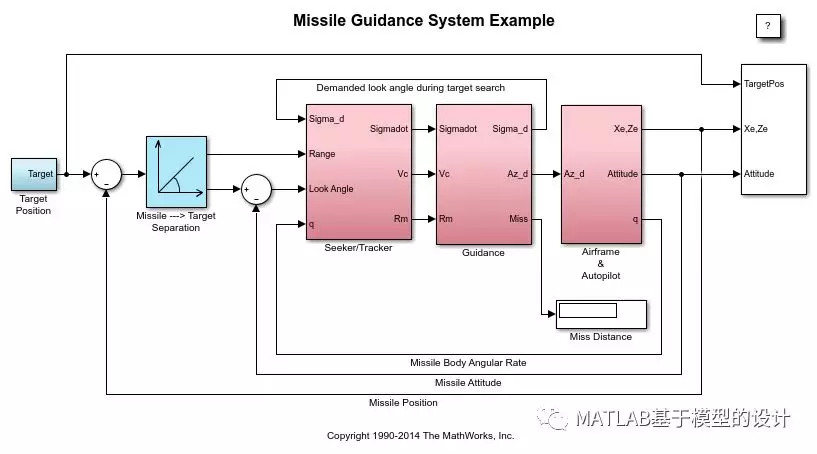
弹体模型包含四个主要子系统,通过加速请求自动驾驶仪进行控制。大气模型计算在高度不断变化情况下的大气条件变化,安定面作动器和传感器模型将自动驾驶仪与弹体耦合,空气动力学和运动方程模型计算作用在弹体上的力和力矩的大小,并对运动方程进行积分。
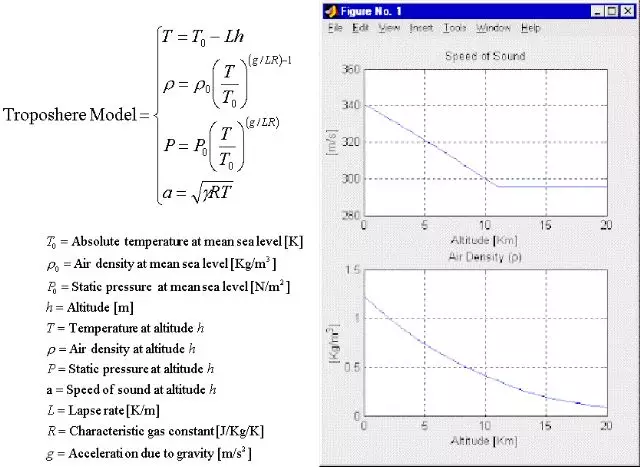
所使用的 Atmosphere 子系统是国际标准大气的近似值,分成两个单独的区域。对流层区域位于海平面到 11 千米之间,在此区域中,假定温度随不断变化的高度线性降低。对流层区域以上是低平流层区域,高度在 11 千米到 20 千米之间。在此区域中,假定温度保持恒定。
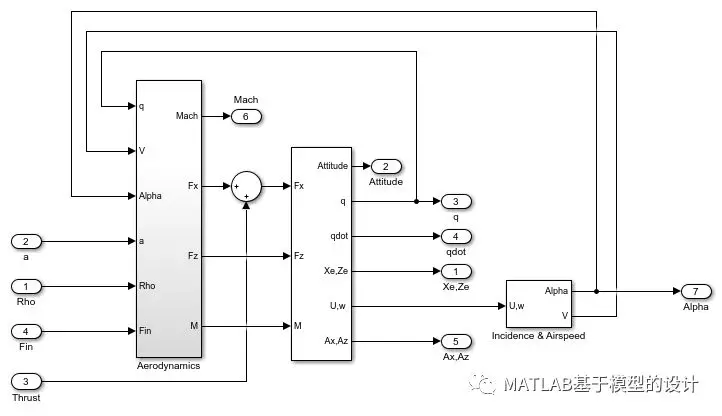
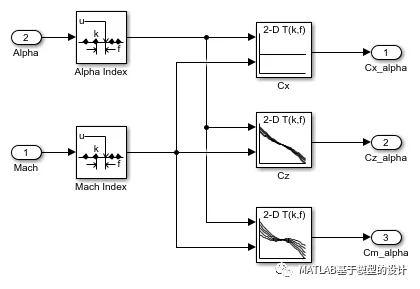
Aerodynamics & Equations of Motion 子系统生成在弹体体轴线上施加到导弹的力和力矩,并对定义弹体线性运动和角运动的运动方程进行积分。
空气动力系数存储在数据集中,在仿真过程中,当前操作条件的值由使用二维查找表模块的插值确定。
导弹自动驾驶仪的目的是控制弹体的法向加速度。在此示例中,自动驾驶仪结构是一个三回路设计,它使用来自放置在重心之前的加速计以及速率陀螺仪的测量值来提供附加阻尼。控制器增益基于入射角和马赫数进行调度,并经过调谐以确保在 10,000 英尺的高度保持性能稳定。
使用经典设计技术设计自动驾驶仪要求根据多个配平飞行条件推导出弹体俯仰动态的线性模型。MATLAB® 可以确定配平条件,并直接从非线性 Simulink 模型推导出线性状态空间模型,从而节省时间并有助于验证已创建的模型。使用 MATLAB Control System Toolbox™ and Simulink® Control Design™ 提供的函数,设计人员可以对弹体开环频率(或时间)响应的行为进行可视化。
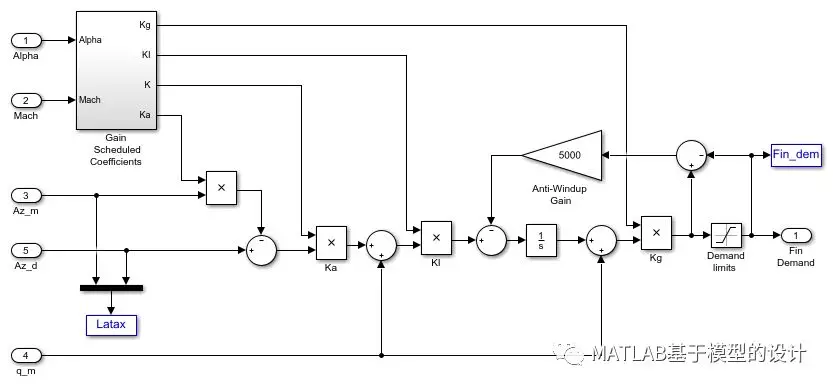
自动驾驶仪设计是在多个线性弹体模型上完成的,这些模型是在预期飞行包线上根据不同飞行条件得出的。要在非线性模型中实现自动驾驶仪,需要将自动驾驶仪增益存储在二维查找表中,并引入一个抗饱和增益以在安定面需求超过最大限制时防止积分器饱和。因此,在非线性 Simulink 模型中测试自动驾驶仪是展示自动驾驶仪在非线性情况下(例如作动器安定面和速率限制等),以及增益随飞行条件的变化而动态改变时,具有令人满意的性能的最佳方式。
图窗:增益调度自动驾驶仪的 Simulink 实现
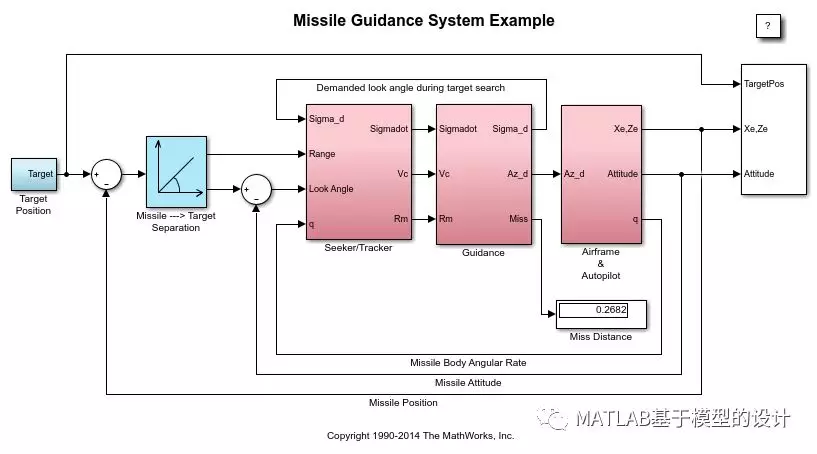
完整的自动制导回路包括 Seeker/Tracker 子系统(返回导弹与目标之间的相对运动的测量值)和 Guidance 子系统(生成将传递到自动驾驶仪的法向加速请求)。自动驾驶仪现在是整体自动制导系统内的内环路的一部分。参考资料 [4] 提供了有关当前正在使用的不同制导形式的信息,还提供了有关用于量化制导回路性能的分析技术的背景信息。
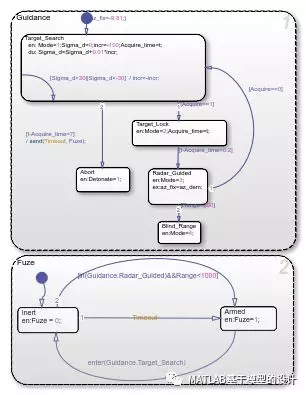
Guidance 子系统的功能不仅是在闭环跟踪期间生成请求,还要执行初始搜索以定位目标位置。Stateflow® 模型用于控制这些不同操作模式之间的切换。模式之间的切换由在 Simulink 中或 Stateflow 模型内部生成的事件触发。通过更改传递到 Simulink 的变量 Mode 的值,可以控制 Simulink 模型的行为方式。此变量用于在可以生成的不同控制请求之间切换。
在目标搜索期间,Stateflow 模型通过向引向头万向节 (Sigma) 发送请求来直接控制跟踪器。一旦目标位于引向头的波束宽度范围 (Acquire) 内,跟踪器便标记目标获取,并且在短暂延迟后,闭环制导启动。Stateflow 是用于快速定义所有操作模式(无论正常操作还是异常情况)的理想工具。例如,此 Stateflow 图中提供了当失去对目标的锁定或在目标搜索期间未获取目标时应采取的措施。
当引向头获取目标后,使用比例导航制导 (PNG) 律来对导弹进行制导,直到命中。自 20 世纪 50 年代以来,这种形式的制导律一直在制导导弹中使用,并且可应用于雷达、红外或电视制导的导弹。导航律需要导弹和目标之间的闭合速度的测量值(用于雷达制导的导弹,可通过多普勒跟踪设备获取)以及惯性视线角的变化率的估计值。
图窗:比例导航制导律
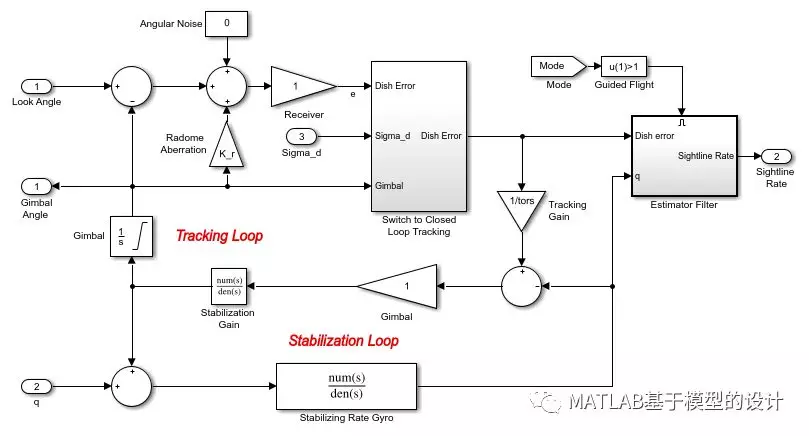
Seeker/Tracker 子系统的目的是使引向头万向节保持与目标对齐,并为制导律提供视线速率的估计值。跟踪器循环时间常量 tors 设置为 0.05 秒,选择它作为将响应速度最大化与将噪声传播保持在可接受程度内之间的折衷。稳定化回路旨在补偿本体旋转速率和增益 Ks,后者是回路的交越频率,在稳定化速率陀螺仪的带宽限制下设置得尽可能高。
视线速率估计值是稳定化速率陀螺仪测得的天线角度变化率与接收器测得的角度跟踪误差 (e) 的变化率的估计值之和的过滤值。在此示例中,估算器滤波器的带宽设置为自动驾驶仪带宽的一半。
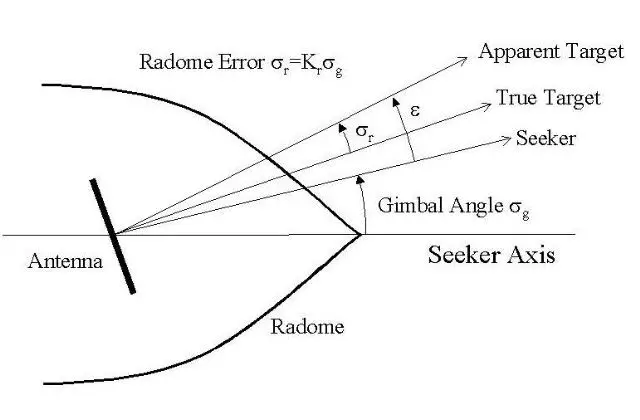
对于雷达制导的导弹,通常建模的寄生反馈效应是天线罩像差的效应。出现这种误差的原因是引向头上的保护盖的形状使返回信号失真,随后给出相对于目标的视角的错误读数。
一般来说,失真量是当前万向节角度的非线性函数,但通常使用的近似假定万向节角度与失真量之间呈线性关系。在上面的系统中,标记为“Radome Aberration”的增益模块表示天线罩像差。还经常对其他寄生效应(如速率陀螺仪对法向加速的灵敏度)进行建模,以测试目标跟踪器和估算器滤波器的稳定性。
图窗:天线罩像差几何图
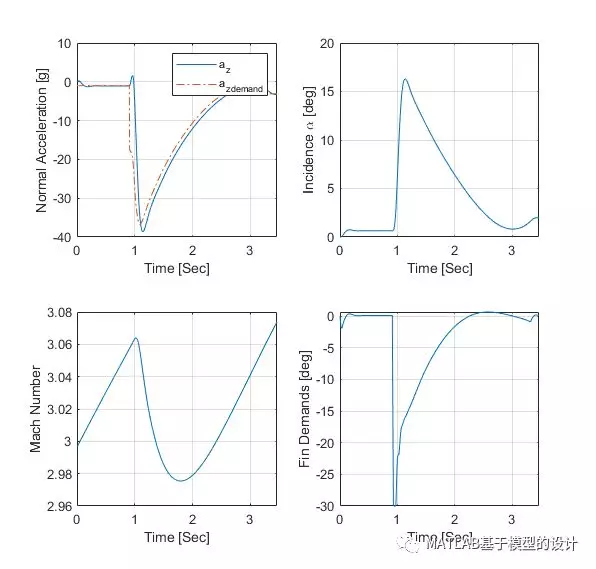
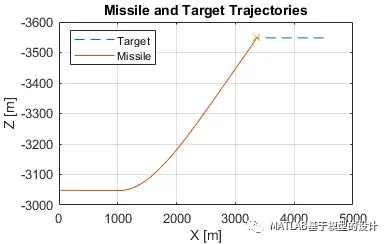
现在要显示整体系统的性能。在此例中,目标定义为以 328 米/秒的恒定速度在初始导弹位置上方 500 米与初始导弹飞行方向相反的航线上行进。根据仿真结果可以确定,在 0.69 秒获取到目标,闭环制导在 0.89 秒后启动。与目标的撞击发生在 3.46 秒,并且在最接近点与目标的距离计算为 0.265 米。
aero_guid_plot.m 脚本创建了性能分析
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020