















































软件

产品


在有限元分析中,动力学分析可以分为显式动力学分析与隐式动力学分析,今天以小球跌落的小案例来给大家介绍一下ABAQUS显式动力学分析的相关流程。

图1 模型了解
回顾一下ABAQUS的有限元分析流程:
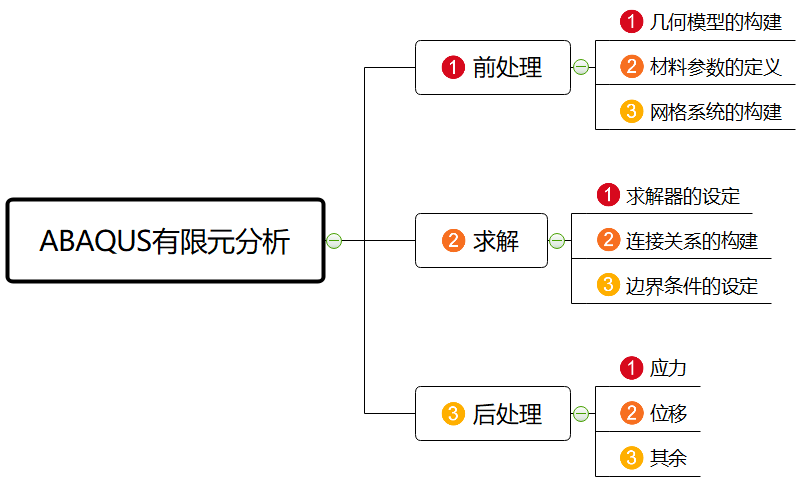
图2 ABAQUS有限元分析流程
一、前处理
1.1 几何模型的构建
左侧模型树当中,右击part导入stp格式几何模型。
1.2 材料参数的定义
1.2.1 材料本构
在property模块中,创建材料,定义elastic参数,杨氏模量为2.1e11Pa,泊松比为0.3;再定义Density参数,密度为7850kg/m3。
1.2.2 截面定义
通过Create Section创建Shell,Homogeneous截面,壳厚度为0.001。
1.2.3 截面指派
通过Assign Section将创建好的截面指派给相应模型。
1.3 网格系统构建
1.3.1 网格划分
在Mesh模块中,划分网格,得到如下所示网格模型。
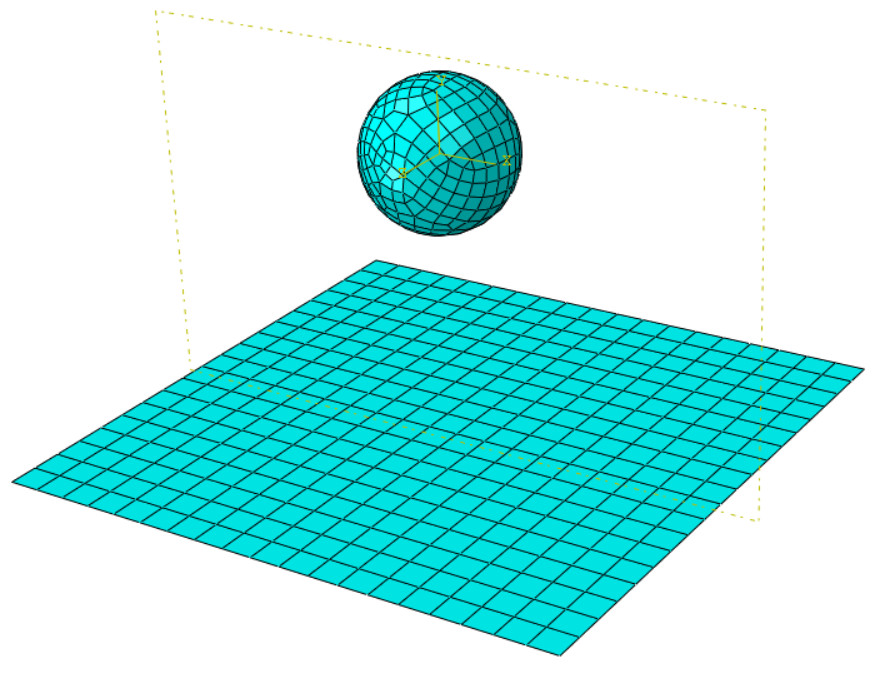
图3 网格模型
1.3.2 单元类型
单元类型保持默认。
1.3.3 装配
在Assembly模块中,通过Create Instance进行装配,如图1所示。
二、求解
2.1 求解器的设定
在Step模块中通过Create Step创建动力显式分析步;时长设置为0.005s,打开几何非线性开关。
2.2 连接关系的构建
通过Create Interaction Property创建接触属性,切向行为选择无摩擦,法向行为选择硬接触。
通过Create Interaction创建接触,主面选择地面上表面,从面选择小球外表面。
2.3 边界条件的设定
2.3.1 位移边界条件
在Load模块中,通过Create Boundary Condition创建Symmetry/Antisymmetry/Encastre约束,选择地面四边,施加Encastre约束。
通过Create Boundary Condition创建Displacement/Rotation约束,约束小球U1、U3~UR3自由度。
2.3.2 载荷边界条件
通过Create Predifined field在initial分析步对小球创建V2方向初速度,大小为-55。
得到的载荷约束如下图所示。
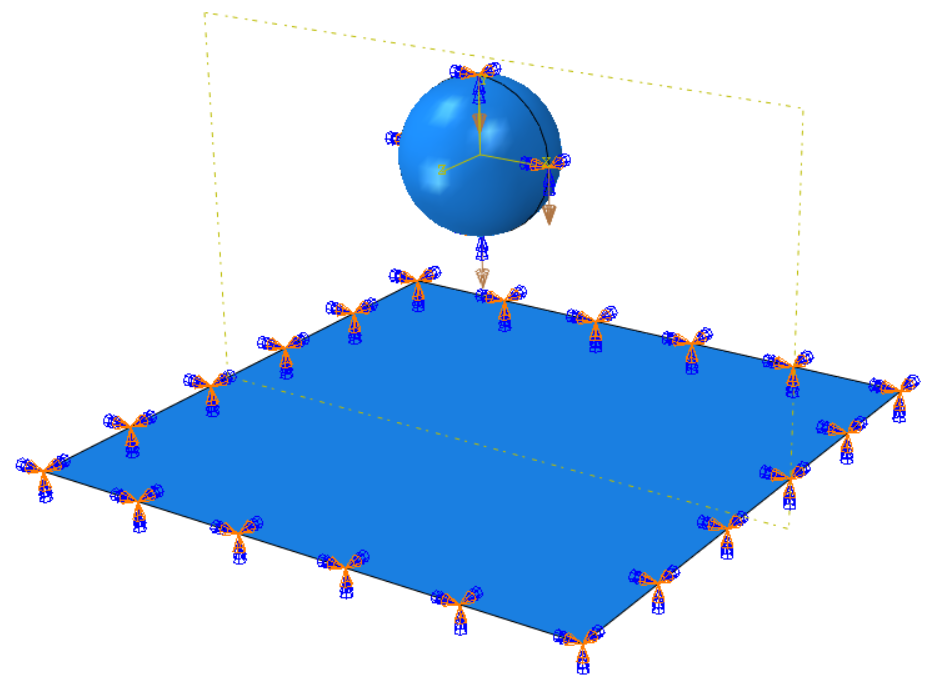
图4 载荷约束
在Job模块中,创建相应作业并提交求解分析。
三、后处理
3.1 位移云图
GIF
图5 位移云图
3.2 应力云图
GIF
图6
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















