















































软件

产品


Abaqus Document帮助文档的1.5.2 节Deep drawing of a square box,帮助文档中下载的inp文件直接导入Abaqus中有时会出现错误,只能直接提交inp文件计算。
冲压回弹利用显示动力学(Explicit)模拟冲压,然后在静力学(Stastic)中模拟回弹。
显示动力学模拟冲压过程:
Part,Property,Assembly,Mesh模块的建模过程忽略,帮助文档中有。总共为4个Part,上模(Punch),下模(Die),固定件(Holder),工件(Blank)。Blank为柔性体,其余三个为刚体(可以在Model Database中修改Part的类型为刚体,也可利用Interaction模块中Constraint的Rigid Body命令),刚体必须设置参考点Reference Point(RP点)。为了减少计算量只建立1/4模型,并施加对称约束。材料属性设置密度(动力学分析必须添加密度),弹性(弹性模量,泊松比),塑性(真实应力,真实应变)。
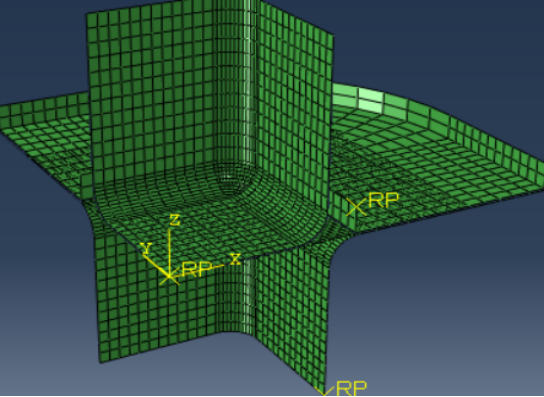
有限元模型
Explicit显示动力学,分析时间0.0036s。常变量与历史变量输出设置为帮助文档默认。

显示动力学分析步
设置重启动:Interval表示odb结果文件共输出多少帧,勾选overlay后表示只输出最后一帧的odb文件。

重启动
Interaction模块:
接触类型为Penalty(罚接触),可以多核计算。Kinematic(运动接触)无法多核计算。
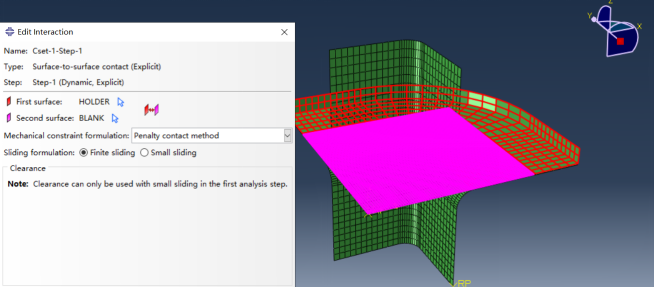
面对面接触
共建立3个接触对,法向硬接触(Hard Contact),切向摩擦系数为0.125。
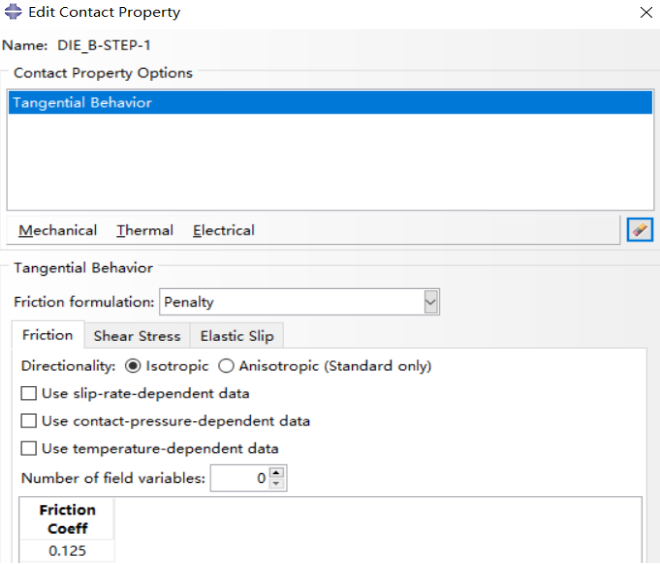
接触属性
定义Punch,Die,Holder为刚体,
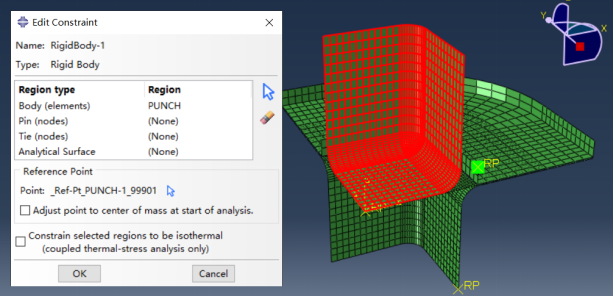
定义刚体
Load模块:
设置Y和X方向的对称约束,下模约束6个方向的自由度,固定件约束除Z方向的自由度并在Z方向施加22870N的力,上模沿Z轴负方向移动0.036m。工件通过接触关系约束自由度。
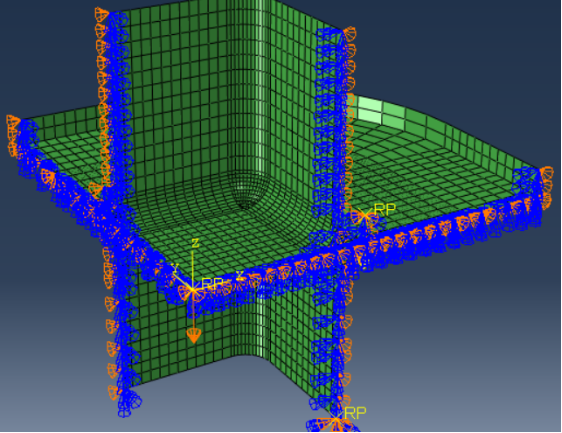
边界条件设置
静力学模拟回弹过程:
直接复制Explicit显示动力学的Model,替换Explicit分析步为Stastic,删除不参与计算的零件Part(Punch,Die,Holder),删除接触关系Interaction(3个接触对),删除边界条件Load(Punch件Z向的位移,Holder件Z向的集中力),增加一个载荷约束工件(Blank)底部一个节点Z方向的自由度,保留对称约束。

静力学分析步
约束工件blank中心节点的z方向平动自由度
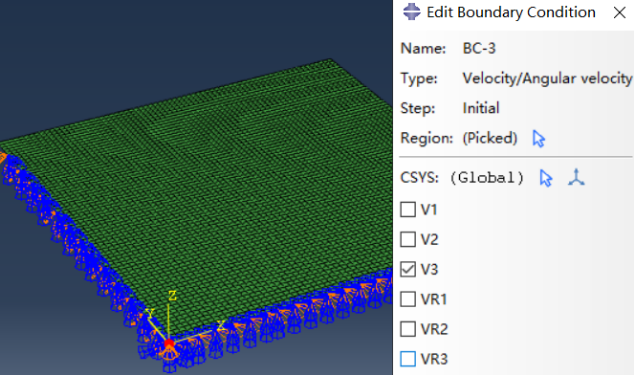
约束工件中心Z方向的自由度
(重要步骤)设置初始状态,Predefined Field,Initial State,输入Explicit中的odb结果文件。
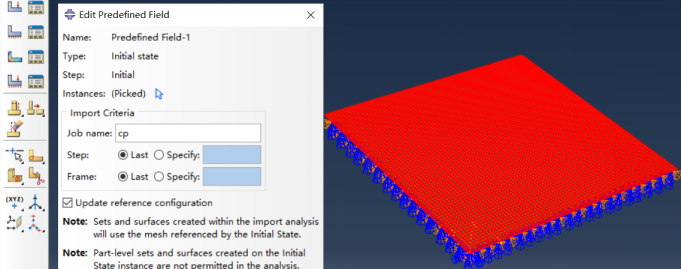
设置工件Blank的初始状态
Job name的名字为Explicit分析步中,做冲压分析所起的名字,Last Step为最后一个分析步,Last Frame为最后一步的odb结果文件,勾选Update reference configuration,在后处理中显示的是回弹量的大小(回弹的位移),如不勾选,为总位移(包括第一个冲压分析步中的位移)。
后处理云图:
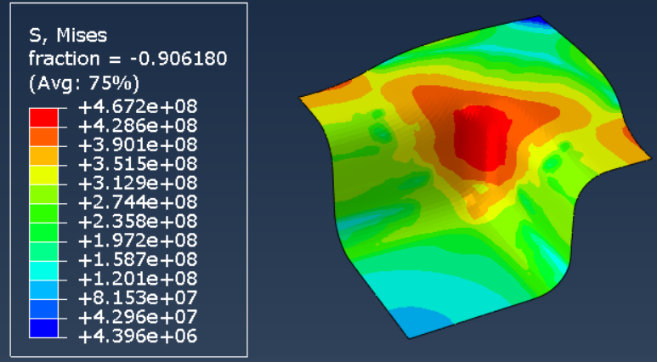
冲压过程
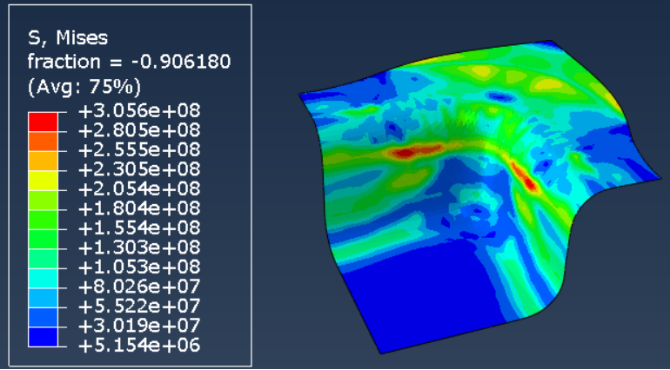
回弹过程
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















