















































软件

产品


Part模块:
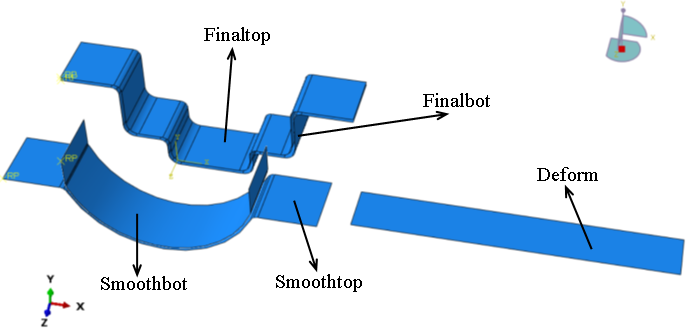
案例中共有5个Part,分别为finaltop,finalbot,smoothtop,smoothbot,deform。前四个Part为刚体,每个Part带有一个RP点,deform为柔性体。
Property模块:
密度为4.55E-9t/mm3(动力学分析必须定义密度),弹性模量为2.1E5MPa,泊松比为0.3,塑性参数如下图所示。零件Deform为柔性体,简化为壳单元,厚度为1mm。
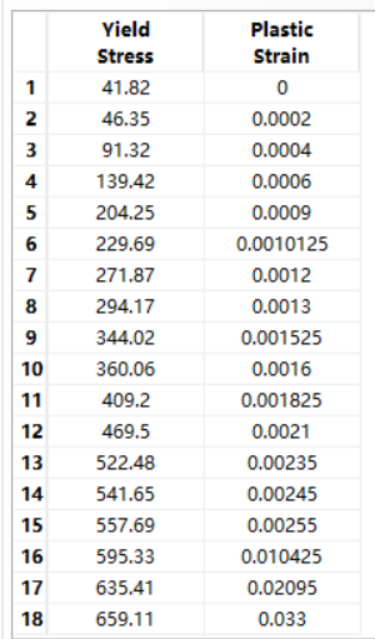
材料的塑性参数
Assembly模块:
由于壳单元是有厚度的,所以建模时,要预留出壳单元的厚度(模具的上下模留有一定的间隙)。
有限元模型
Step模块:
Explict显式动力学分析步(冲压分析似乎都是动力学模拟冲压,静力学模拟回弹),共7个分析步,每个分析步的时间是我自己设置的,没有按照案例中的来。
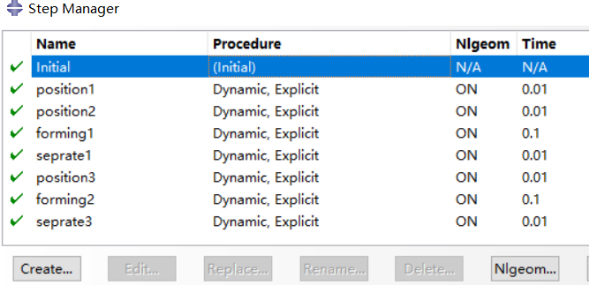
分析步设置
每个分析步的后处理动画输出20帧,可以适当增大两个0.1s分析步的输出帧数,场变量与历史变量的输出设置默认。为了减少odb文件的大小,可以不输出历史变量(提交job时会有warning忽略掉即可),减少场变量中的输出选项。
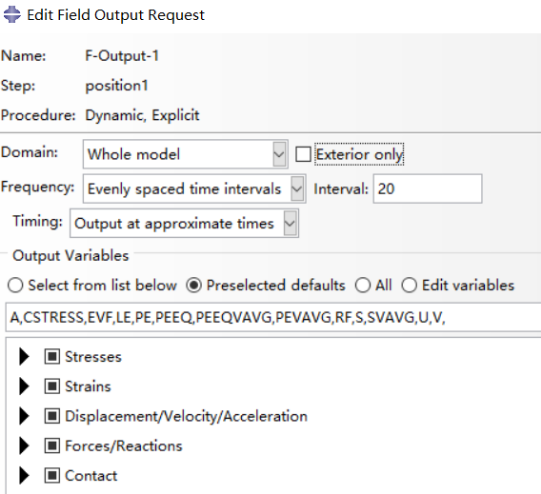
场变量的输出设置
Load模块:
先介绍Load模块,明确整个分析流程后,再介绍Interaction接触模块。共建立了10个载荷,载荷是我自己建立的,案例中建立的载荷看起来有些乱。
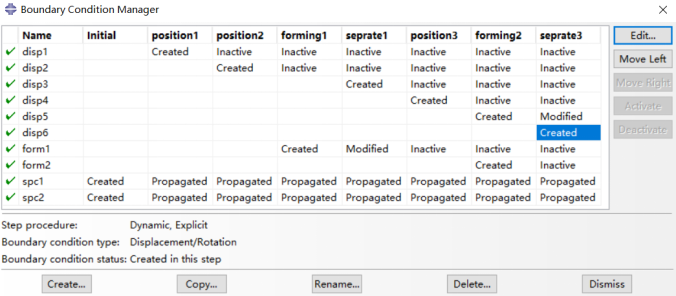
边界条件的设置
先介绍两个spc约束,建立在initial初始分析步,spc1与spc2分别约束smoothbot与finalbot两个零件的6个自由度,因为两个下模是不动的,并且贯穿7个分析步。
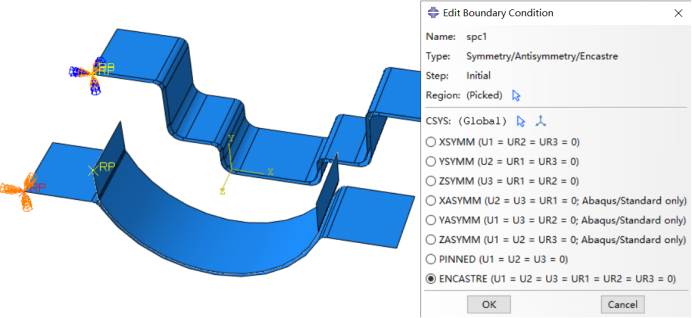
Spc1载荷(与spc2类似)
disp1载荷:smoothtop上模在position1分析步中沿Y方向移动60mm。因为这个载荷只在position1这个分析步起作用,所以后续分析步中设置为deactive(不激活),动力学分析添加位移载荷要定义幅值曲线,由于接触关系不是很复杂,幅值曲线设置为线性的即可。
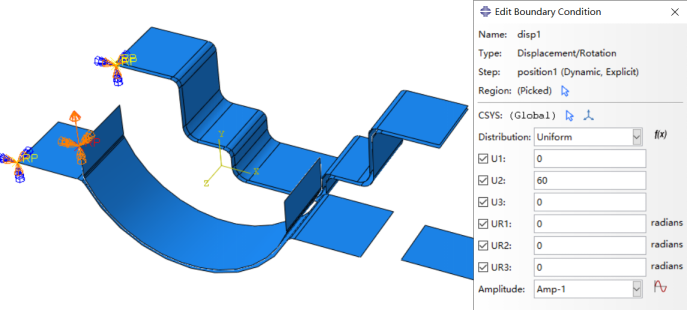
disp1载荷设置
disp2载荷:零件deform在position2分析步中沿X轴负方向移动220mm。后续分析步同样deactive不激活。由于disp2载荷与disp1载荷所在分析步的分析时长相同,所以可以使用相同的幅值曲线。
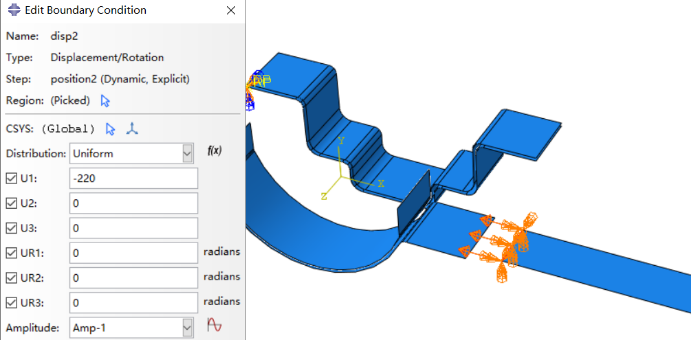
disp2载荷设置
form1载荷:form1载荷在两个分析步中起作用。smoothtop上模在forming1分析不中沿Y轴向下移动60mm。由于forming1分析步涉及到接触关系,forming1分析步的分析时间为0.1s(稍大一点),并定义一个新的幅值曲线(Amp-2)。
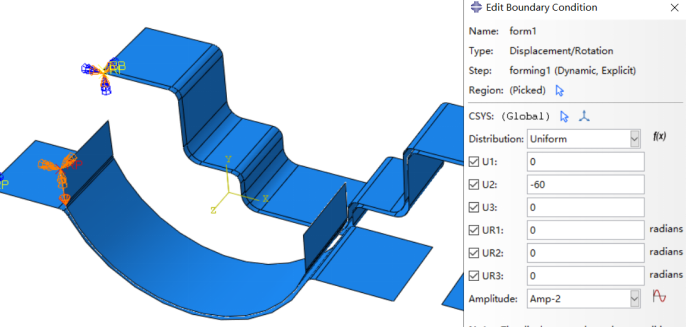
form1载荷forming1分析步的设置
smoothtop上模在seprate1分析步中,应约束6个自由度,上模固定不动。后续分析步deactive不激活。
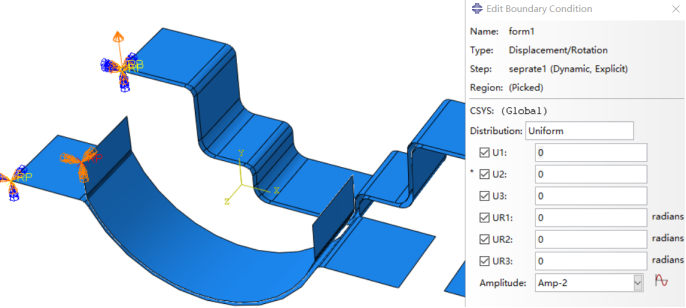
form1载荷seprate1分析步的设置
disp3载荷:finaltop上模在seprate1分析步中沿Y正方向移动60mm。后续分析步deactive不激活。

disp3载荷设置
disp4载荷:零件deform在position3分析步中沿Z轴负方向移动100mm。后续分析步deactive不激活。
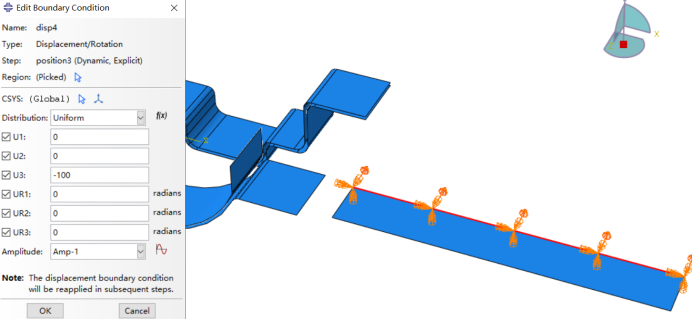
disp4载荷设置
form2载荷:finaltop上模在forming2分析步中沿Y轴负方向移动60mm,模拟模具冲压过程。幅值曲线与form1载荷一致,同样后续分析步deactive不激活。

form2载荷设置
disp5载荷:disp5载荷在两个分析步中起作用。零件deform在forming2冲压分析步约束Z方向的自由度,防止在冲压过程中沿Z轴移动。
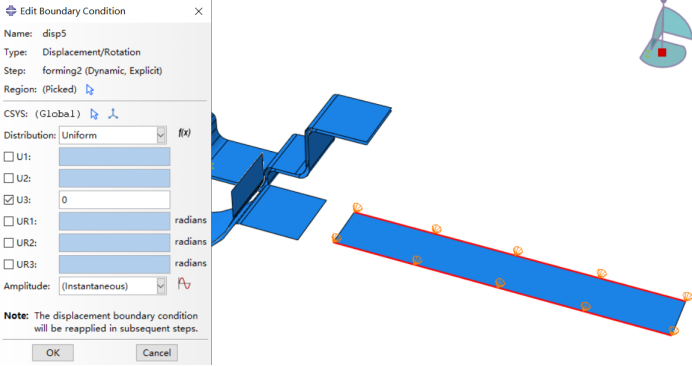
disp5载荷在forming2分析步中的设置
零件deform在seprate3分析步约束Y和Z方向的自由度,防止在finaltop上模移动过程中,被上模带动(沿Y轴移动)。如果不约束Y轴的自由度,finaltop上模在seprate3分析步移动中会带动deform移动,可能因为有接触关系,这个对比会在后处理中介绍到。而Z方向自由度的约束,是继承上一个分析步的设置,至于Z方向是否应该被约束,读者可自己尝试改变。
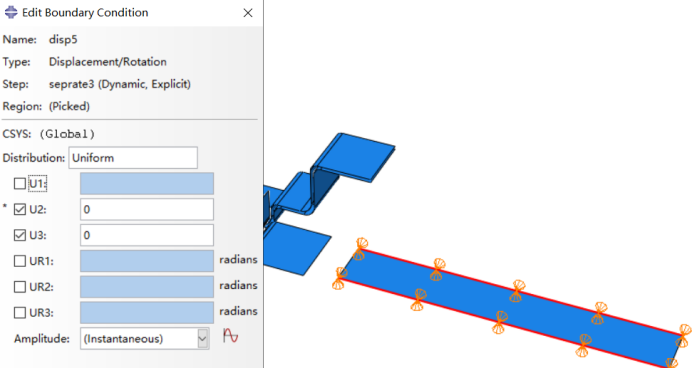
disp5载荷在seprate3分析步中的设置
disp6载荷:冲压结束后,finaltop上模在seprate3分析步中沿Y轴正向移动60mm。
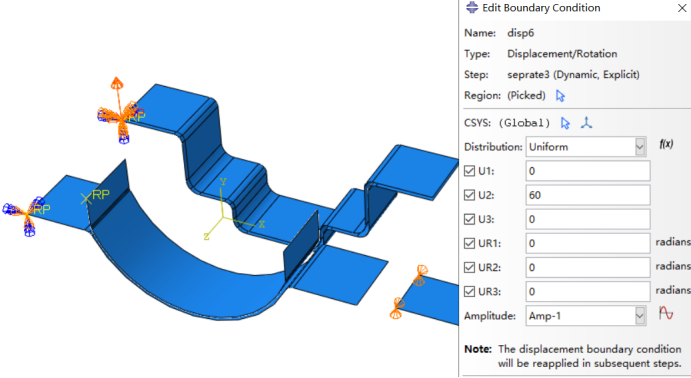
disp6载荷设置
nteraction模块:
整个分析流程中共建立了4个接触,是模具finalbot,finaltop,smoothbot,smoothtop分别与毛坯件deform的接触。4个接触对的接触属性是相同的。接触属性为法向硬接触(Hard Contact),切向罚摩擦(Penalty)接触,摩擦系数为0.3。
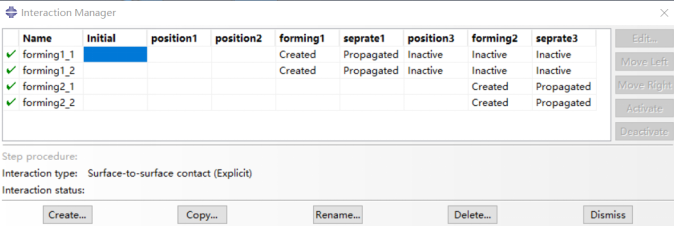
接触设置
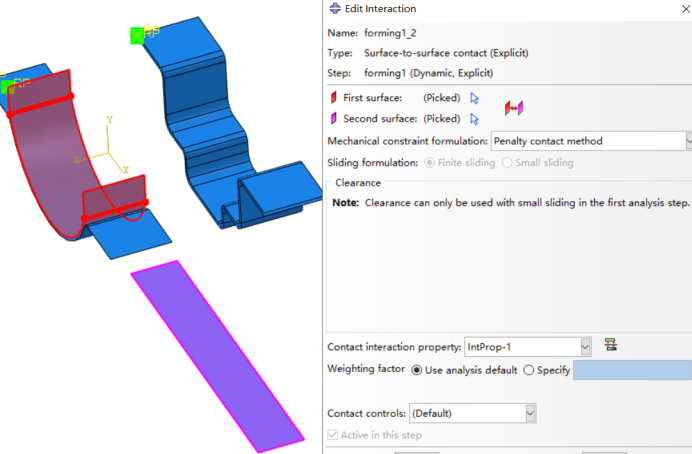
在forming1分析步中建立smoothbot与deform的接触关系(与smoothtop和deform的接触类似,只详细介绍一个),使用Surface to Surface Contact面对面接触,接触对的算法为罚接触(Penalty contact method),可以多核计算。红色的面为主面,因为smoothbot为刚体,比deform柔性体硬,所以将其定义为主面。Deform柔性体定义为从面,但是要注意定义主从面时,主面与从面的法向应该是相对的。由于接触关系只在forming1与seprate1分析步中起作用,所以后续的分析步的接触关系取消deactive。
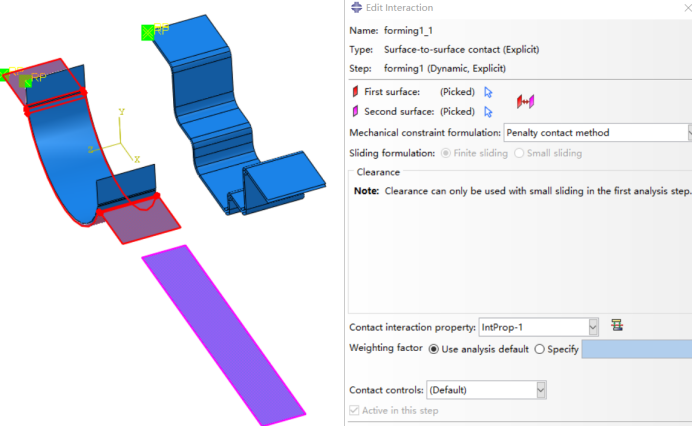
smoothbot与deform的接触
smoothtop与deform的接触
在forming2分析步中建立finalbot与deform的接触关系(与finaltop和deform的接触类似,只详细介绍一个),使用Surface to Surface Contact面对面接触,接触对的算法为罚接触(Penalty contact method),可以多核计算。
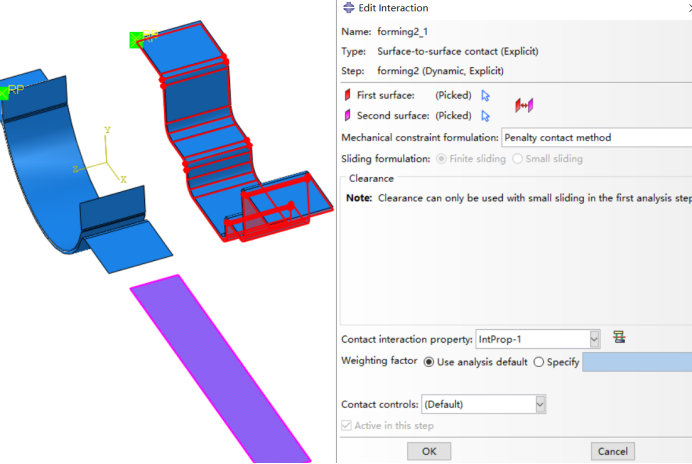
finalbot与deform的接触
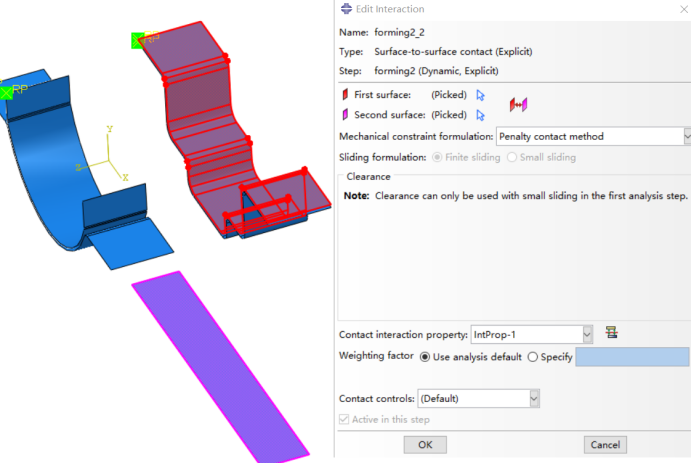
finaltop和deform的接触
Mesh模块:
由于都是壳单元,所以划分四边形网格。4个模具为刚体,毛坯件为柔性体,单元的属性默认即可。
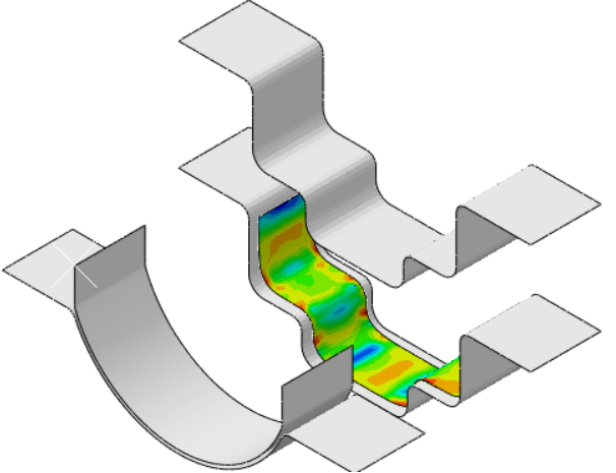
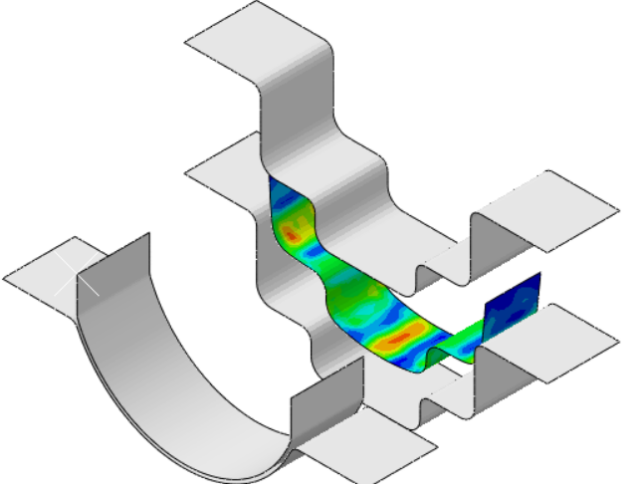
Visualization模块:
从后处理动画中看出,在第一次冲压结束后,毛坯件调整位置,做第二次冲压的过程中(forming2分析步),毛坯件发生较明显的‘颤抖’,不知道是应力波现象还会毛坯件发生了回弹,比较了书籍配套的文件,发现分析步时间的设置不同,原本的时间很短,可能是时间较长,速度较小,并且在2个冲压分析步设置了质量缩放系数,速度放大2倍。毛坯件在第一次冲压后,回弹量较明显(个人理解,不知道是否正确)。
disp5载荷在seprate3分析步中约束Y方向自由度
disp5载荷在seprate3分析步中没有约束Y方向自由度
GIF
后处理动画
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















