















































软件

产品


任务目标:掌握握爪的性质和握爪命令的使用。
1.握爪的概念
握爪(Gripper)能够实现手指握爪(即夹具)或吸盘的功能,通过握爪命令设置几何体,能够完成夹持或吸取的动作。在NX MCD中,握爪抓取几何体,几何体必须是碰撞体才能被检测到。
握爪命令分为手指握爪和吸盘两种形式:
(1) 手指握爪:创建一个带手指的握爪,用于夹持动作。
(2) 吸盘:创建模拟吸盘并带有计时,用于吸取动作。
2.创建握爪
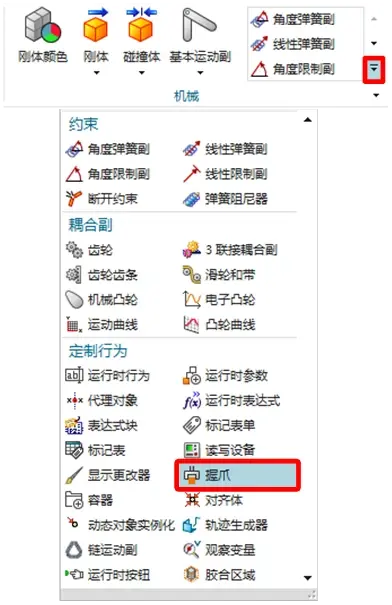
打开握爪对话框的方式有三种。如图所示。
(1) 方式一
(2) 方式二
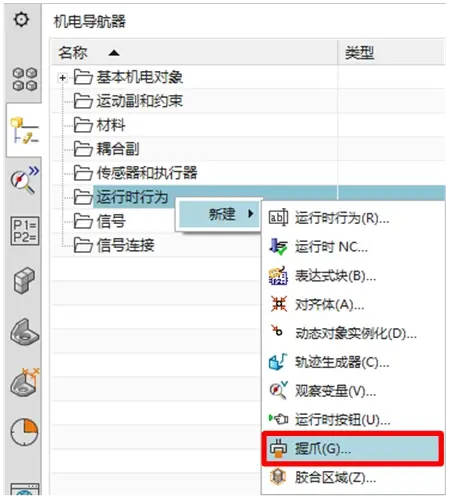
(3) 方式三

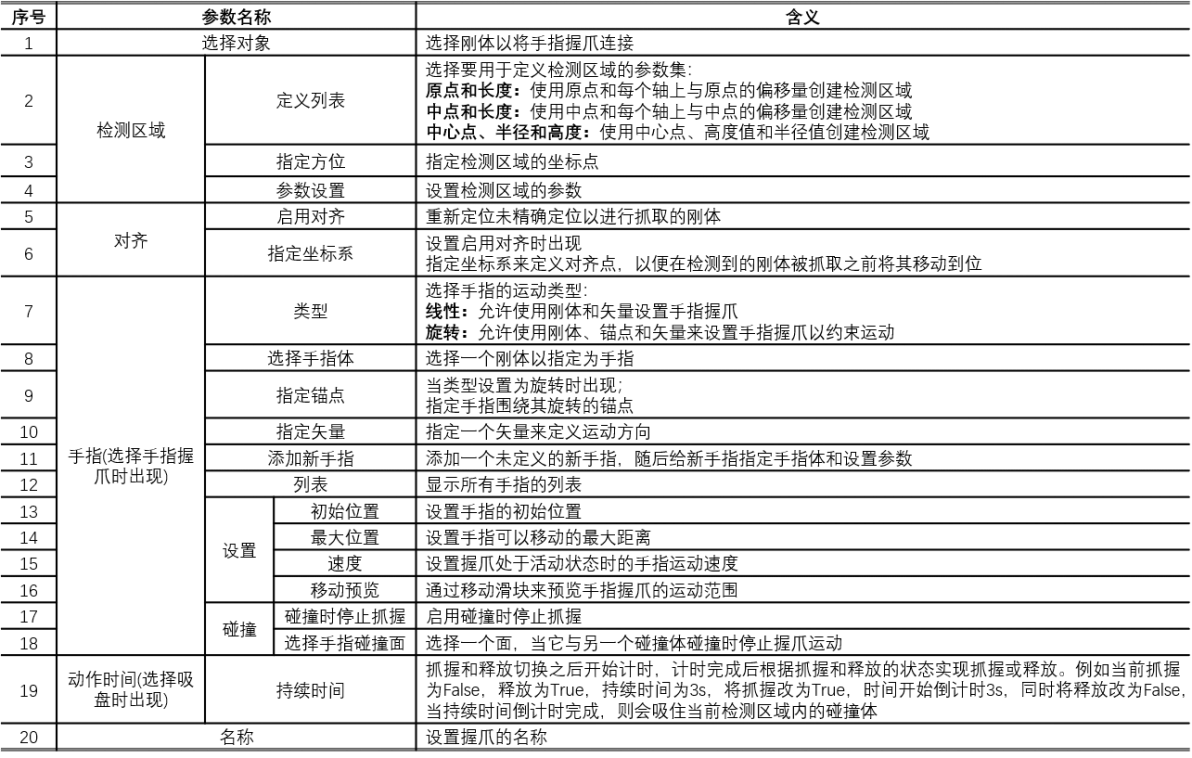
3.握爪参数含义


4.实战演练
【例6-2a】 打开“#例6-2a 夹爪 练习.prt”,对模型中的夹爪进行握爪设置。
要求实现仿真效果:点击播放运行仿真,在运行时察看器中双击抓握,夹爪就夹紧,物料无法挪动。
具体操作如下:


《生产线数字化仿真与调试(NX MCD)》课程,是广州高谱技术有限公司开发。
视频课程在线免费学习:https://www.bilibili.com/video/BV1vk4y1p7EK/
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















