















































软件

产品


Geometry defects(几何缺陷):
Ø gaps(间隙)
Ø interference(干涉)
Ø overlaps(过约束)
上述几何缺陷在添加约束时很容易被忽略,容易造成以下问题。
Ø Convergence trouble(收敛问题)
Ø Waste of computational resources(浪费算力)
Ø Waste of your valuable time(浪费时间)
比如刚体运动会导致发生收敛问题。
在动态分析中,惯性效应可以把刚体运动模式计算出来。
但是,在静态分析中,刚体位移意味着矩阵奇异,无法得到唯一解。这种刚体运动通常是物体没有正确约束引起的。
Initial gaps: Rigid body motion(初始间隙导致刚体位移)
Initial penetration: Over-estimated contact force leading to convergence issue(接触对间的初始渗透使接触力被高估导致收敛问题)
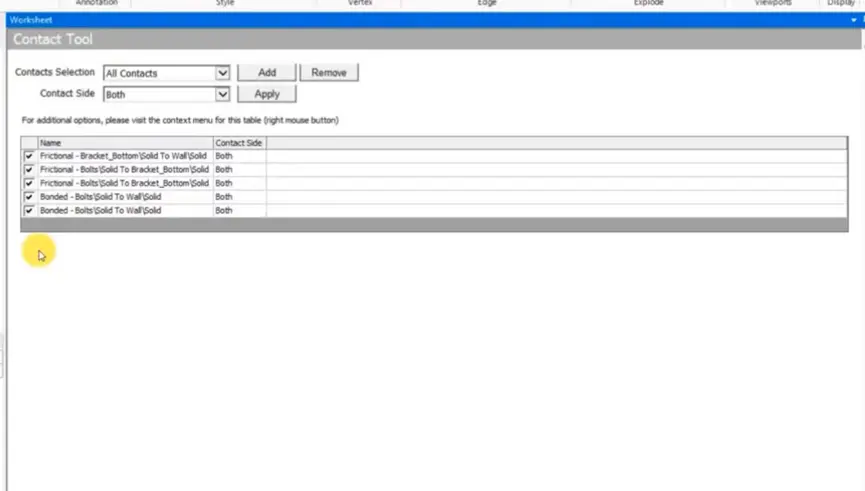
Contact Tool(用于检查初始接触的有用工具)
它是基于网格而不是几何形状。因此,改变网格就需要重新生成接触。
例如,圆面与平面接触
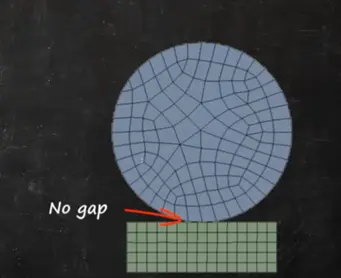

增大网格尺寸导致出现接触间隙,需要更改“Pinball Radius(弹球半径)”或“Adjust to Touch(调整为触摸)under the Interface Treatment”。
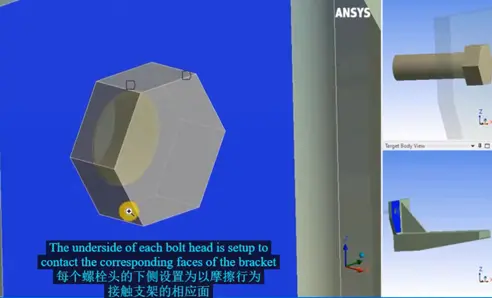
案例:通过两螺栓固定在结构上的支架模型
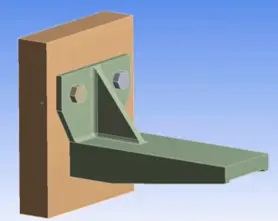
此装配体进行三类接触设置
Ø 螺栓固定的两面接触为摩擦(Frictional)
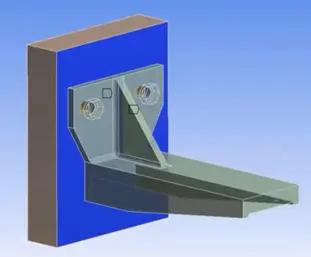
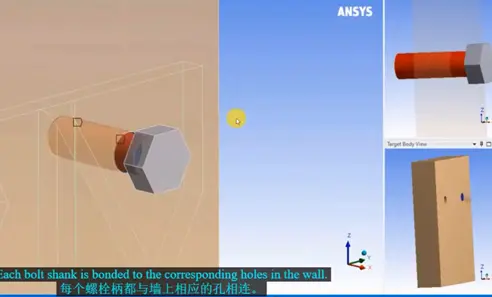
Ø 螺栓柄侧面与孔内壁接触为绑定(Bonded)
Ø 螺栓头下侧与部件接触面接触为摩擦(Frictional)
但是,用以上设置分析进行分析结果在一次就无法收敛。因此,使用Contact Tool进行接触检查。
生成初始信息表
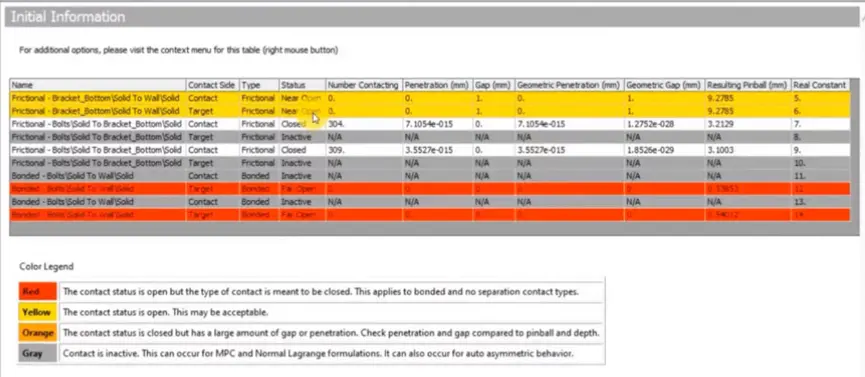
“间隙(Gap)”和“几何间隙(Geometric Gap)”的区别
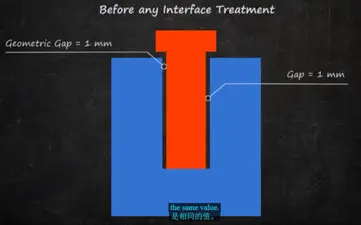
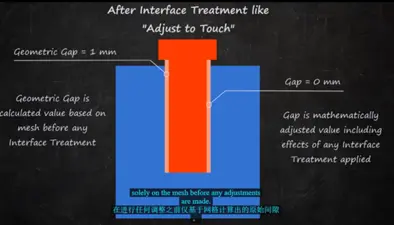
以上两幅图表示了对间隙进行计算调整前后的不同,间隙调整可以用“Adjust to Touch”或“Contact Surface Offset”等工具实现。
Gap代表计算中的间隙;Geometric Gap代表基于网格计算的实际几何结构间隙,结构不变它是始终不变的。
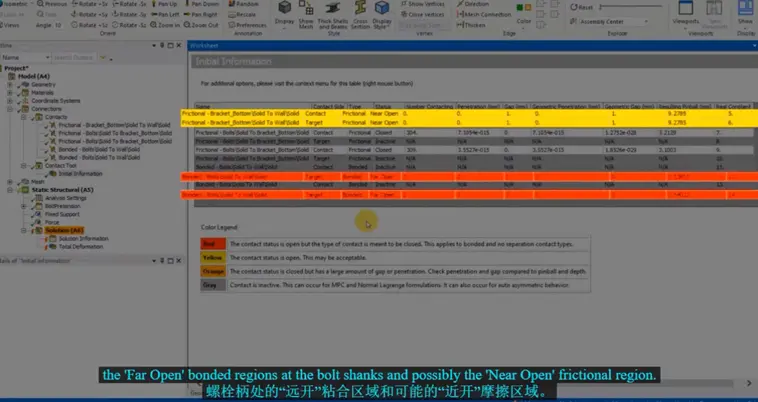
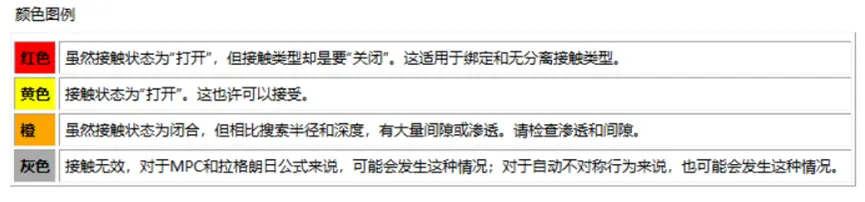
橙色和红色的信息栏表达的接触可能是计算不收敛的原因
插入“Gap”可以直观看到空隙的分布情况

消除间隙的两种方法
Ø Modify the original geometry(几何:修改原始几何形状)
Ø Use Contact Interface Treatment tools(计算:使用接触界面处理工具)
注:接触界面处理工具仅限于解决小的“nuisance”的间距和渗透
处理“Frictional”接触问题
进行“Adjust to Touch”操作:在“Geometric Modification”中将“Interface Treatment”设置为“Adjust to Touch”
处理“Bonded”接触问题
进行“Pinball Region”操作:在“Advanced”中将“Pinball Region”设置为“Auto Detection Value”,生成的“Auto Detection Value”数值是与该接触的最大间隙一致的。
进行上述操作后,所有报告的“Status”均为“Closed”,这说明接触设置无误。再进行求解就可以获得收敛解。
附:
“Adjust to Touch”操作(将存在几何间隙的接触在计算中间隙定义为0)
在“Definition”中将“Type”设置为“Rough/Frictional/Frictionless”;在“Geometric Modification”中将“Interface Treatment”设置为“Adjust to Touch”
以下为参考视频
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















